 llo
llo(grmpf, maudite description raccourcie, on se croirait sur twitter ici)
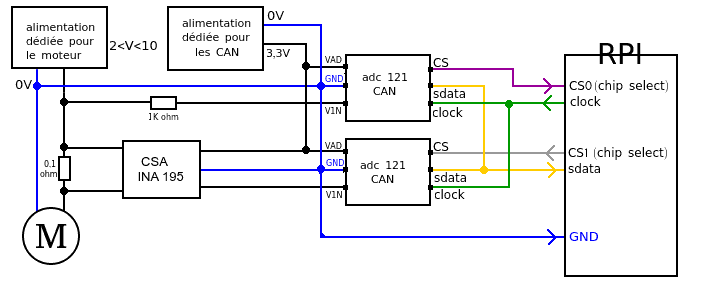
J'ai d'abord réalisé le circuit de lecture de la tension grâce à un convertisseur analogique numérique connecté à un Raspberry Pi, puis j'ai ajouté la lecture du courant, à l'aide d'un double miroir de courant connecté à un second CAN.
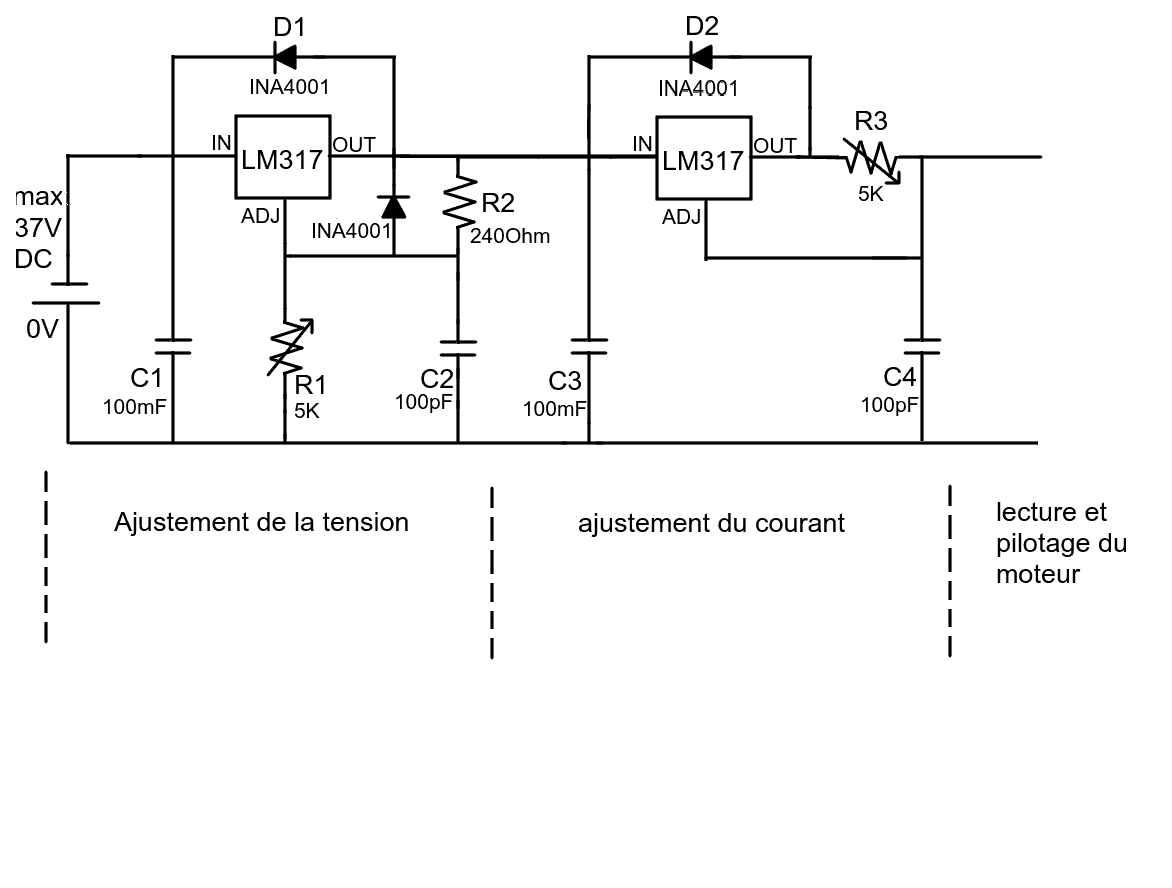
Je dépendais jusqu'alors d'une carte externe (BTE13 001A) pour régler la tension. Je vais désormais réaliser la carte d'alimentation, ce qui me permettra au passage de régler aussi le courant délivré au moteur.
Enfin, pour mesurer la force déployée par le moteur pendant le test, je vais réaliser un capteur de pesage à compensation électromagnétique des forces (à l'aide notamment d'un capteur opto-électronique et d'un aimant) et j'ajouterai un driver de moteur afin de pouvoir piloter des servos.
(et si hackaday me coupe aussi ce log, je laisse tomber)


 fred frazelle
fred frazelle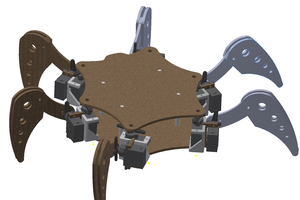
 vel17075
vel17075