 alireza safdari
alireza safdari
We used to build robots for most parts of our undergraduate degree and it was always a struggle to get a remote controller that satisfies all of our needs. It was in our second year (2013), when we first started to think about making our own remote controller. Back then, our knowledge was very limited so we made a tailored remote controller for one of our projects. We liked the end results but there were many short comings. The trend of designing a tailored remote controller for each project went on and on till 2015. Eventually, we graduated and after few years we decided to work on something interesting in 2017. While going through all of our previous experiences we noticed market still does not offer a solution for our remote controller problem, so we started to work on a new open-source remote controller.
We named it "Alpha V1" and the project was initiated with few core values:
- Open-Source Everything
- Ease of Customization and Modification
After 2 years of brain storming, prototype and firmware development, Alpha V1 is very close to becoming a product in market. We are planning to sell Alpha V1 through crowdfunding. If you want to be notified at launch, subscribe at https://www.craetech.com/alpha-v1
If you want to see the latest pictures and content about Alpha V1, follow us on social media:
Instagram: https://www.instagram.com/craetech/
Facebook: https://www.facebook.com/craetech/
In the following section Alpha V1's unique features are highlighted:
- Designed for Robotics Applications
- Ease of Modification
- Code-Free Customization
- Simple User Interface
- Superior Communication System Compare to RC Transmitters
- 2 Ways Digital Communication
- Channels' Flexibility (18 channels at 100Hz, 36 channels at 50Hz or 72 channels at 25Hz)
- Advanced and Flexible Telemetry System
- Open-Source All the Way
- Open-Source Software
- Open-Source Hardware
- Arduino Compatible
















 Benny
Benny

 goathens
goathens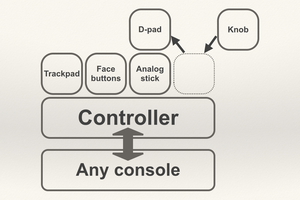
 PointyOintment
PointyOintment
Is this Project still alive? I would love to build one of these!