video of the jog controller working.
0%
0%
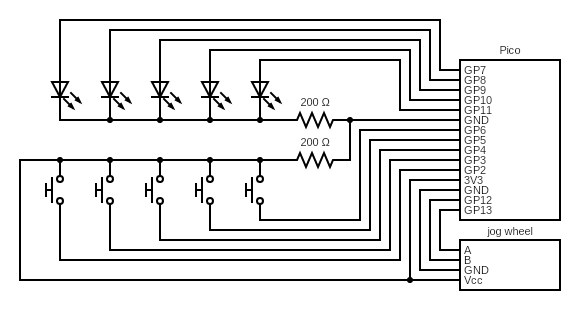
Pocket NC jog controller
A project with pi pico, it makes controlling your Pocket NC much easier
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 solder everything.
solder everything.
 Shyri Villar
Shyri Villar
 Nyeli Kratz
Nyeli Kratz
 Evo
Evo
 PointyOintment
PointyOintment
hi, im having trouble getting the software to work. When I run the receiver I get a bunch of errors.