0%
0%
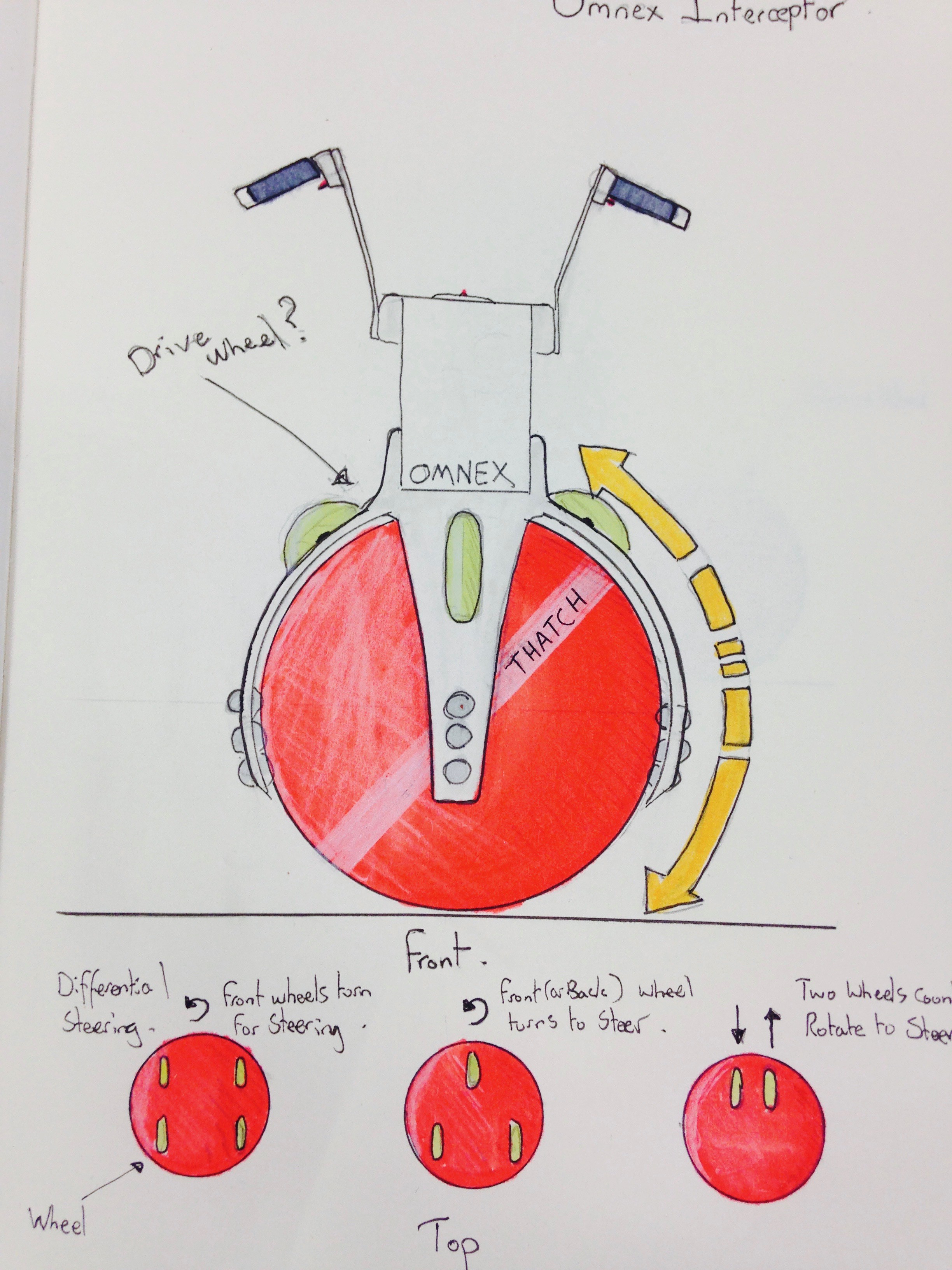
TALON Omnidirectional Ball Bike
An omnidirectional electric motorbike that in place of wheels uses technology to balance on a single large sphere.
 Nick Thatcher
Nick ThatcherBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
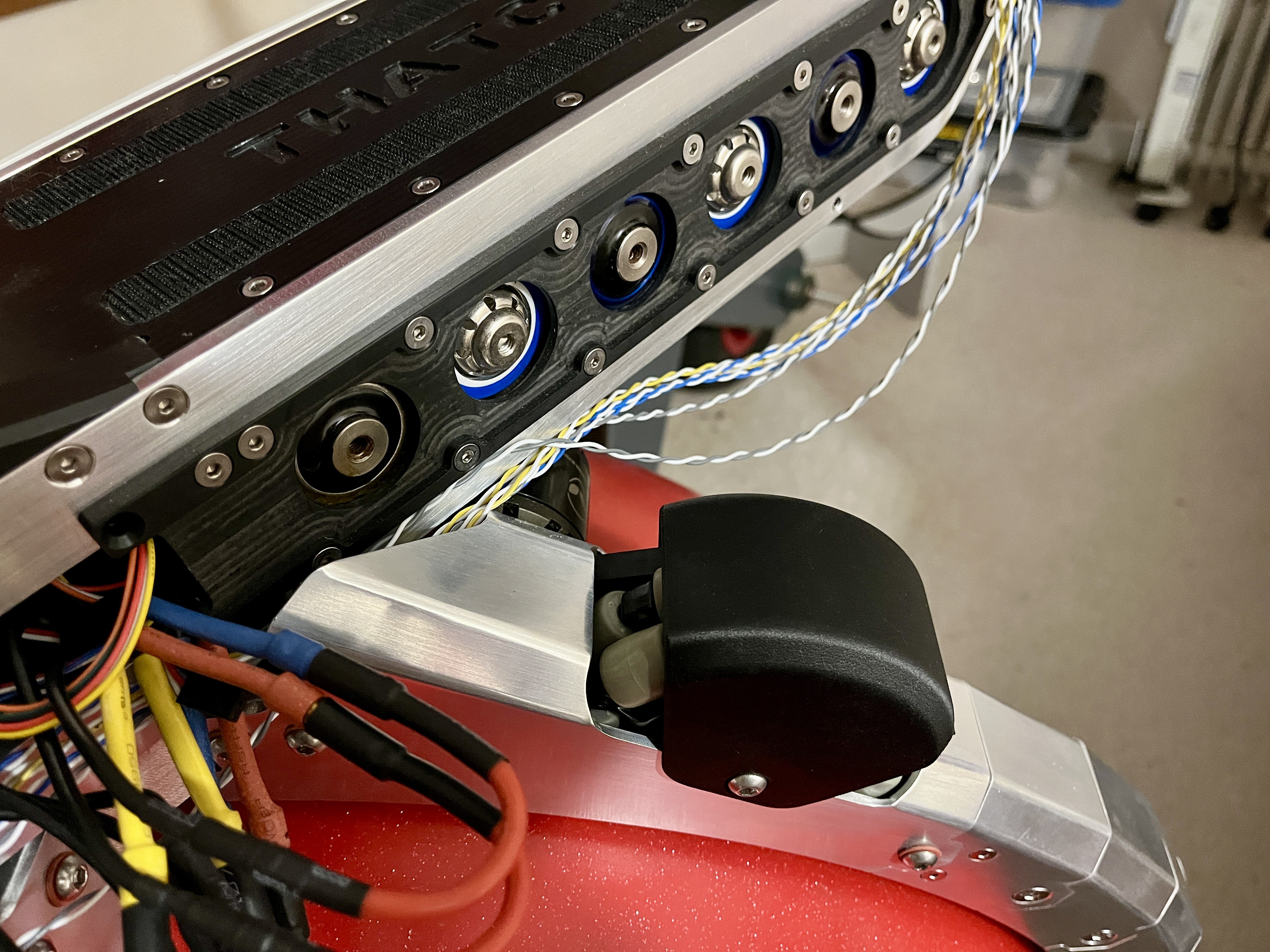


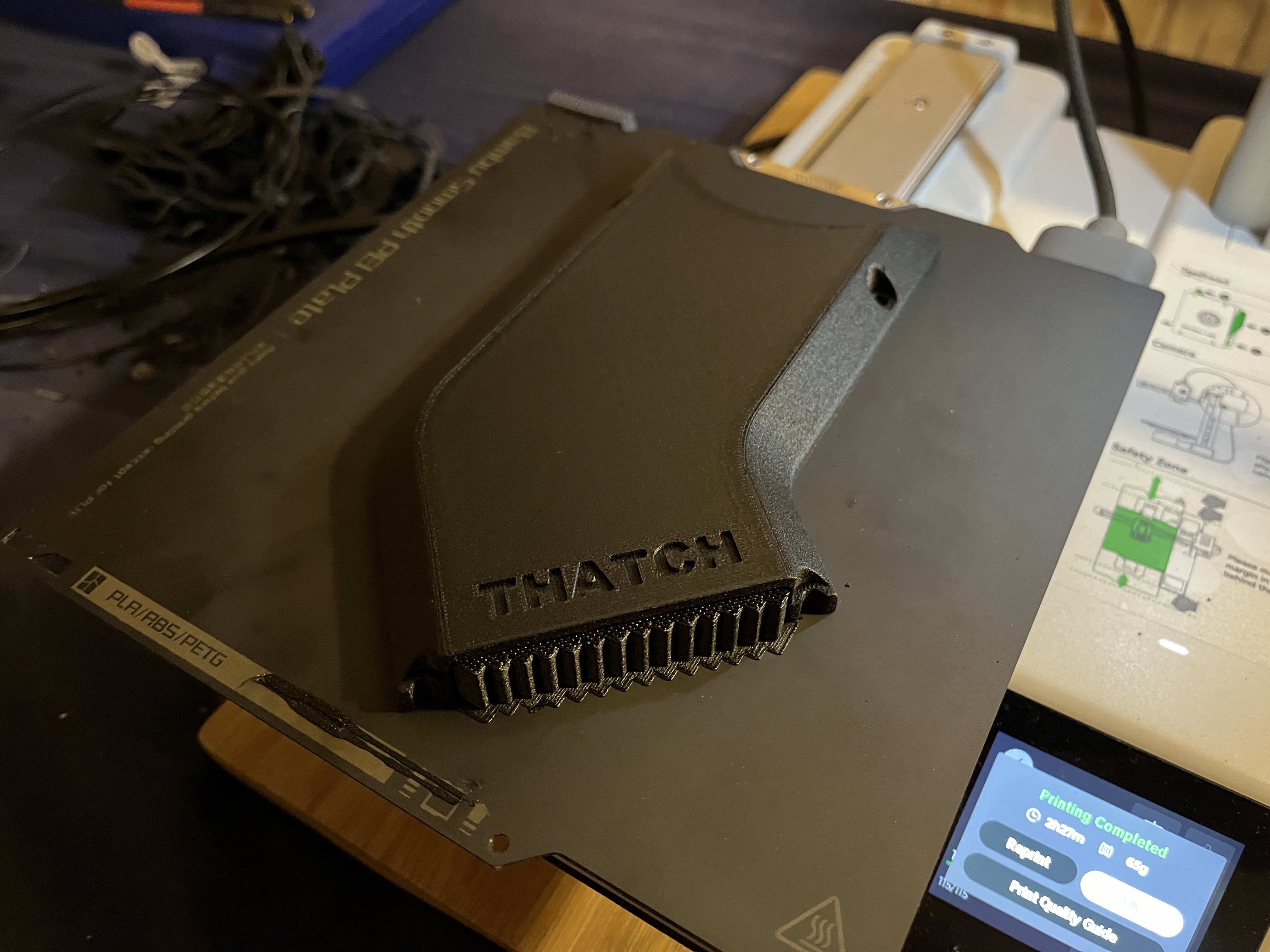



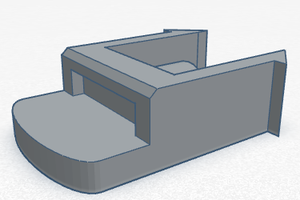
 As the omni-wheel covers are probably going to end up receiving some pretty big knocks, another big consideration is part strength. With this type of printing, getting the layers to run in the correct direction is a major component of final part durability, print orientation can also have a big impact on the finish.
As the omni-wheel covers are probably going to end up receiving some pretty big knocks, another big consideration is part strength. With this type of printing, getting the layers to run in the correct direction is a major component of final part durability, print orientation can also have a big impact on the finish.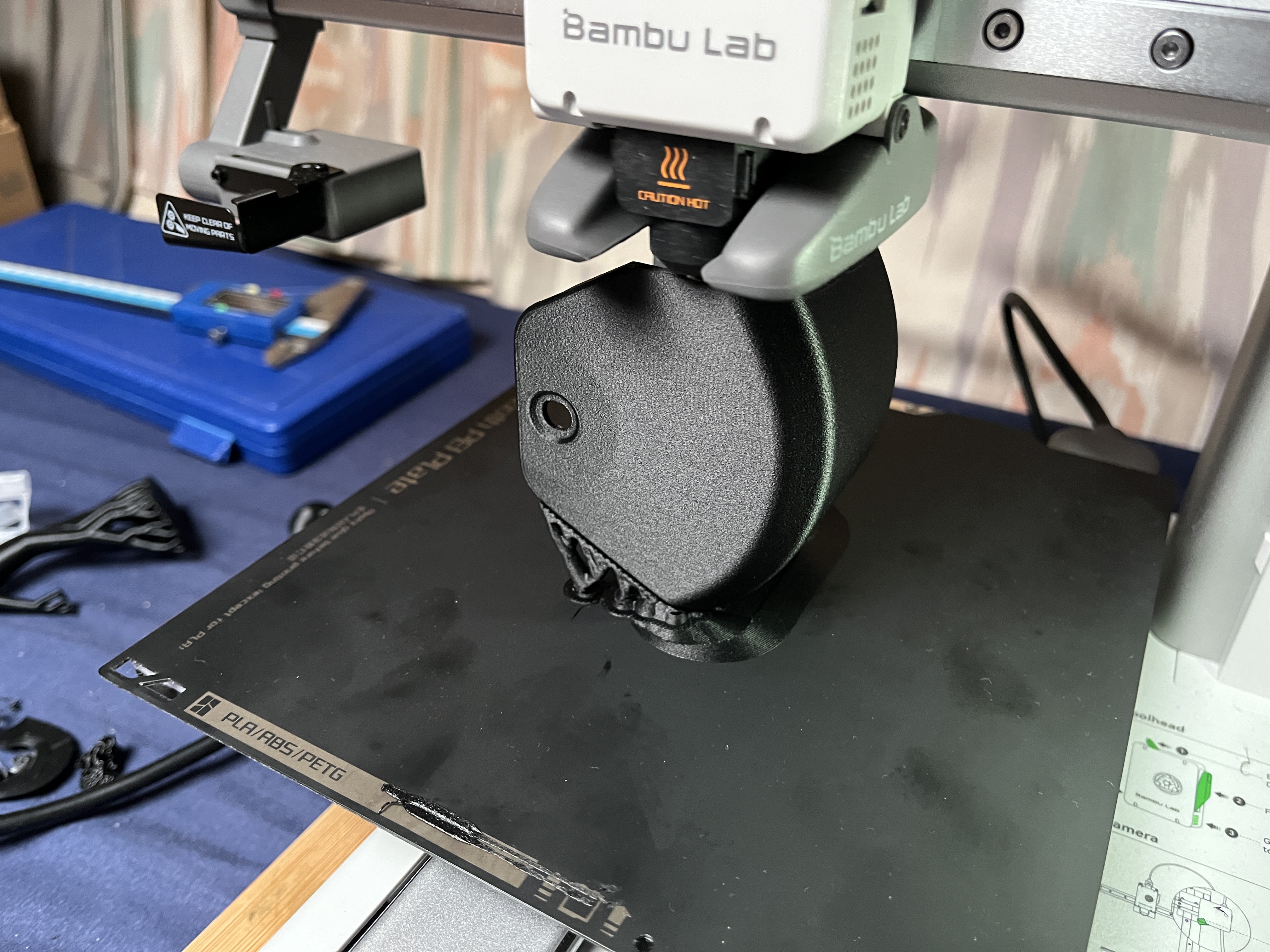











 AccidentalRebel
AccidentalRebel
 Sam Smith
Sam Smith
 Giovanni
Giovanni
Here is very similar application (opensource, I believe). You could use it in your work.
https://www.linkedin.com/feed/update/urn:li:ugcPost:6540687171635023872
https://dms.licdn.com/playback/C5605AQEPPBT0aJ7cCw/14a853ce5d8042aea813624f8eb4be14/feedshare-mp4_3300-captions-thumbnails/1507940147251-drlcss?e=1559671200&v=beta&t=jTbfWmw2ykDrwV_atBN_X8bD4sZR__jvCD5oNab1iyg
https://github.com/mindThomas/Kugle-MATLAB