0%
0%
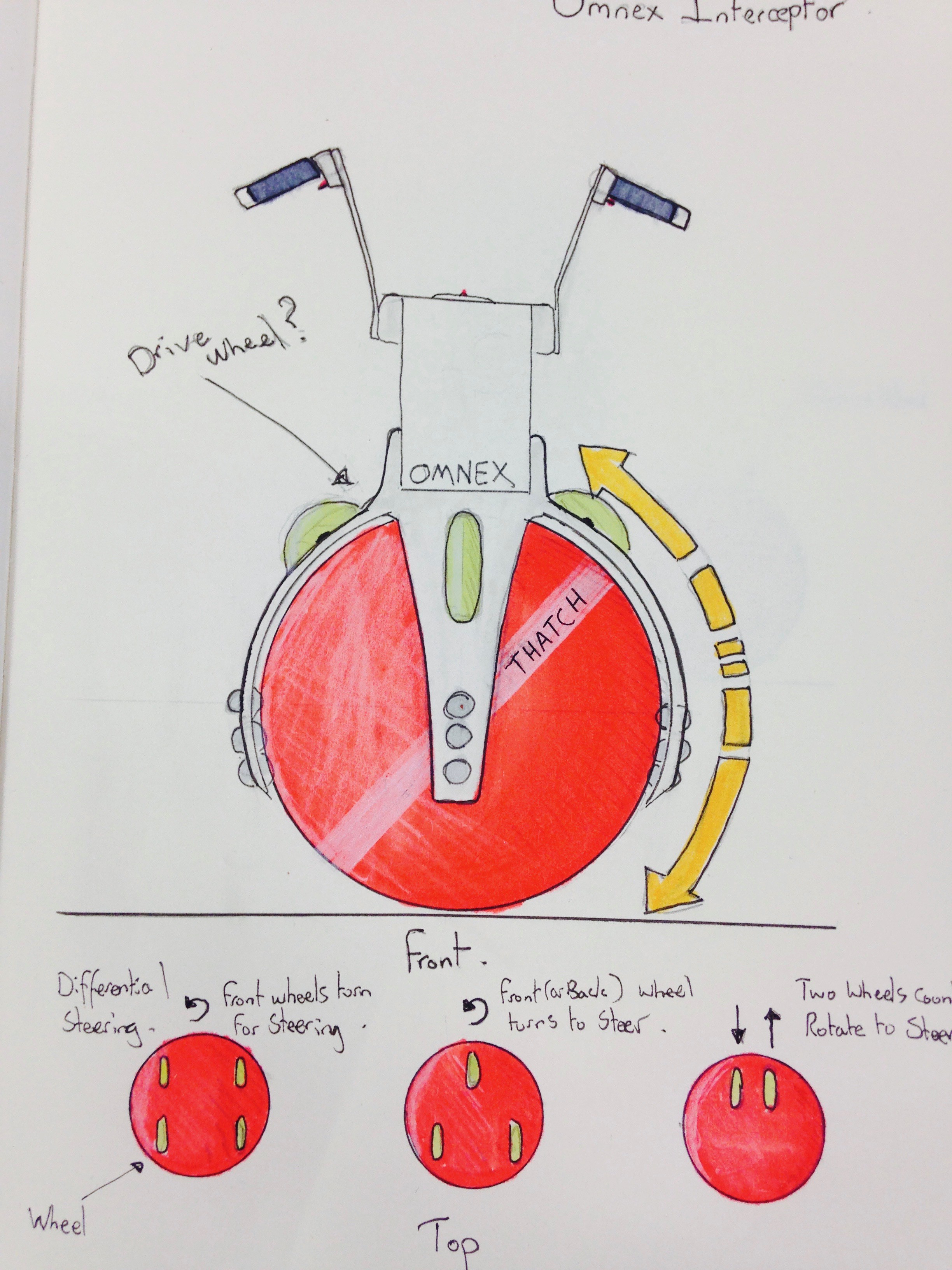
TALON Omnidirectional Ball Bike
An omnidirectional electric motorbike that in place of wheels uses technology to balance on a single large sphere.
 Nick Thatcher
Nick ThatcherBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 Martijn
Martijn
Here is very similar application (opensource, I believe). You could use it in your work.
https://www.linkedin.com/feed/update/urn:li:ugcPost:6540687171635023872
https://dms.licdn.com/playback/C5605AQEPPBT0aJ7cCw/14a853ce5d8042aea813624f8eb4be14/feedshare-mp4_3300-captions-thumbnails/1507940147251-drlcss?e=1559671200&v=beta&t=jTbfWmw2ykDrwV_atBN_X8bD4sZR__jvCD5oNab1iyg
https://github.com/mindThomas/Kugle-MATLAB