 Mike Moore
Mike MooreMeet Bobble Bot
Why did we make this?
We created Bobble-Bot to empower aspiring makers, tinkerers, and creatives. The robot provides a fun and affordable way to acquire and demonstrate valuable skills in computer science and engineering.
What Problem Does it Solve?
Every day businesses around the world struggle to cope with a global shortage in technology related skills and talent. This costs the world economy hundreds of billions of dollars in unrealized revenues.
We believe that one contributor to this problem stems from a lack of accessible, high-quality, and open-source educational material. The Bobble-Bot project helps motivated individuals develop valuable cross-disciplinary technology related skills.
In particular, Bobble-Bot fills a shortage within the educational robotics space. Until now, there has not been an easily accessible open-source example of real-time control for the DIY crowd.
What Are Our Goals?
We want educators, students, and hobbyists to get up and running with this open-source robot as quickly as possible. Our hope is that this project functions as a guide for how to develop and test robust control systems for robot prototypes. We envision this robot will be useful to professionals looking to sharpen their skills while having fun, and also to students looking for a hands-on application to the often dry engineering theory covered in courses around the world. The combination of simulation and hardware opens up many possibilities for exploration and development.
Where to Start
We recommend you start with the Bobble-Sim. That's a free way to gain some quick insight into the project.
How to Contribute
For software contributions, please read our contributing guide. We welcome support in all areas, though. If you have any ideas, leave a comment. Thanks!
Licensing Information
Bobble-Bot's simulation software licensing agreement can be found here.
The robot's software infrastructure heavily leverages the Robot Operating System (ROS). The ROS licensing agreement can be found here.
The simulator also relies on Gazebo. The Gazebo licensing agreement can be found here.



 Recently I received some feedback from a few of our users requesting a Matlab sample project that can communicate with Bobble-Bot. This seemed like a reasonable enough request, so I released a new
Recently I received some feedback from a few of our users requesting a Matlab sample project that can communicate with Bobble-Bot. This seemed like a reasonable enough request, so I released a new 




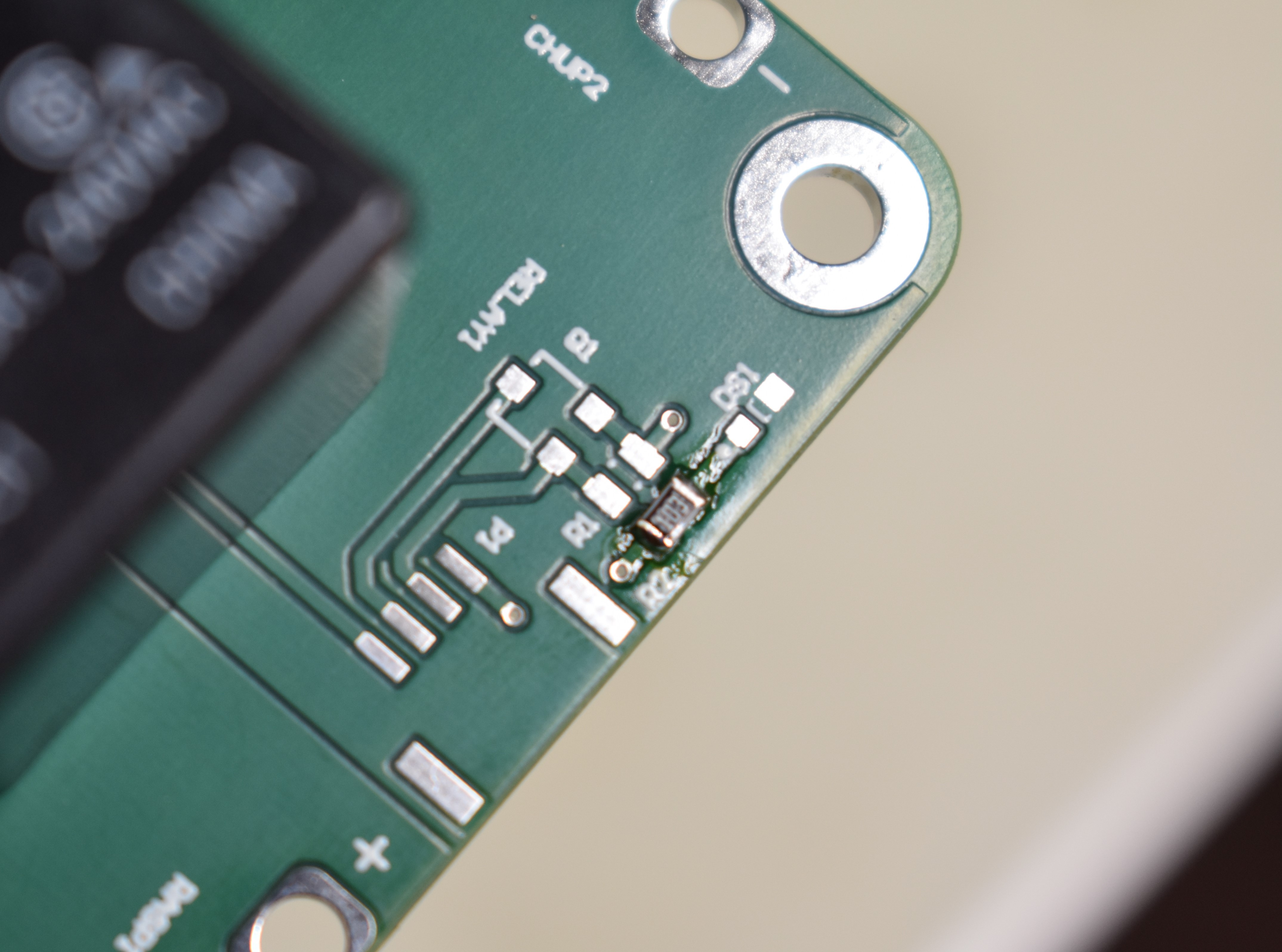
 The first step is to get the resistor on the board and to fill one of the two pads with solder. The other pad is kept clean. Make your life easy - the right pad is soldered here because... well.. I'm right handed, so that's the hand I hold the soldering iron in. Soldering SMT can be a little delicate, so make sure you set yourself up for success.
The first step is to get the resistor on the board and to fill one of the two pads with solder. The other pad is kept clean. Make your life easy - the right pad is soldered here because... well.. I'm right handed, so that's the hand I hold the soldering iron in. Soldering SMT can be a little delicate, so make sure you set yourself up for success.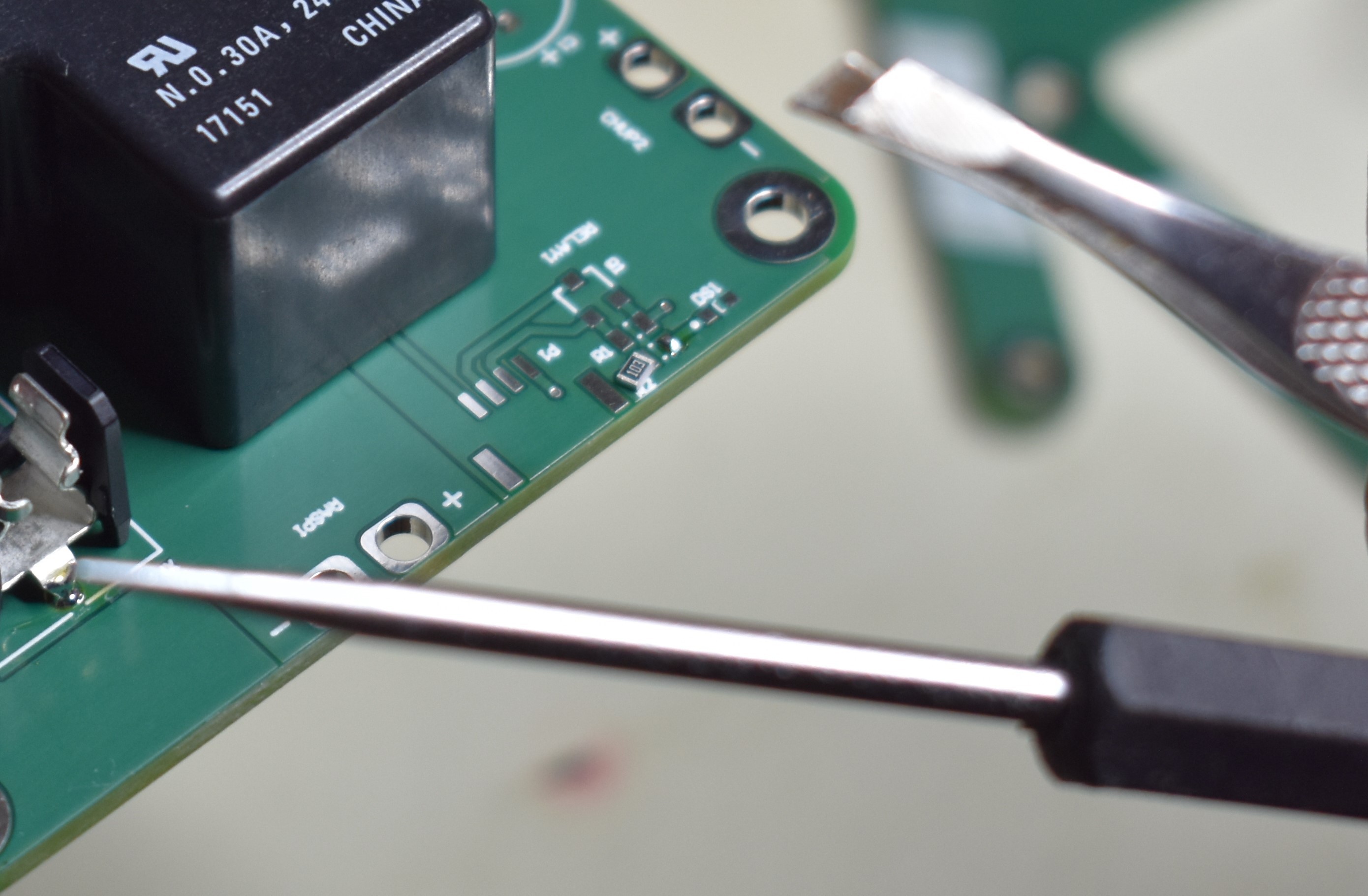
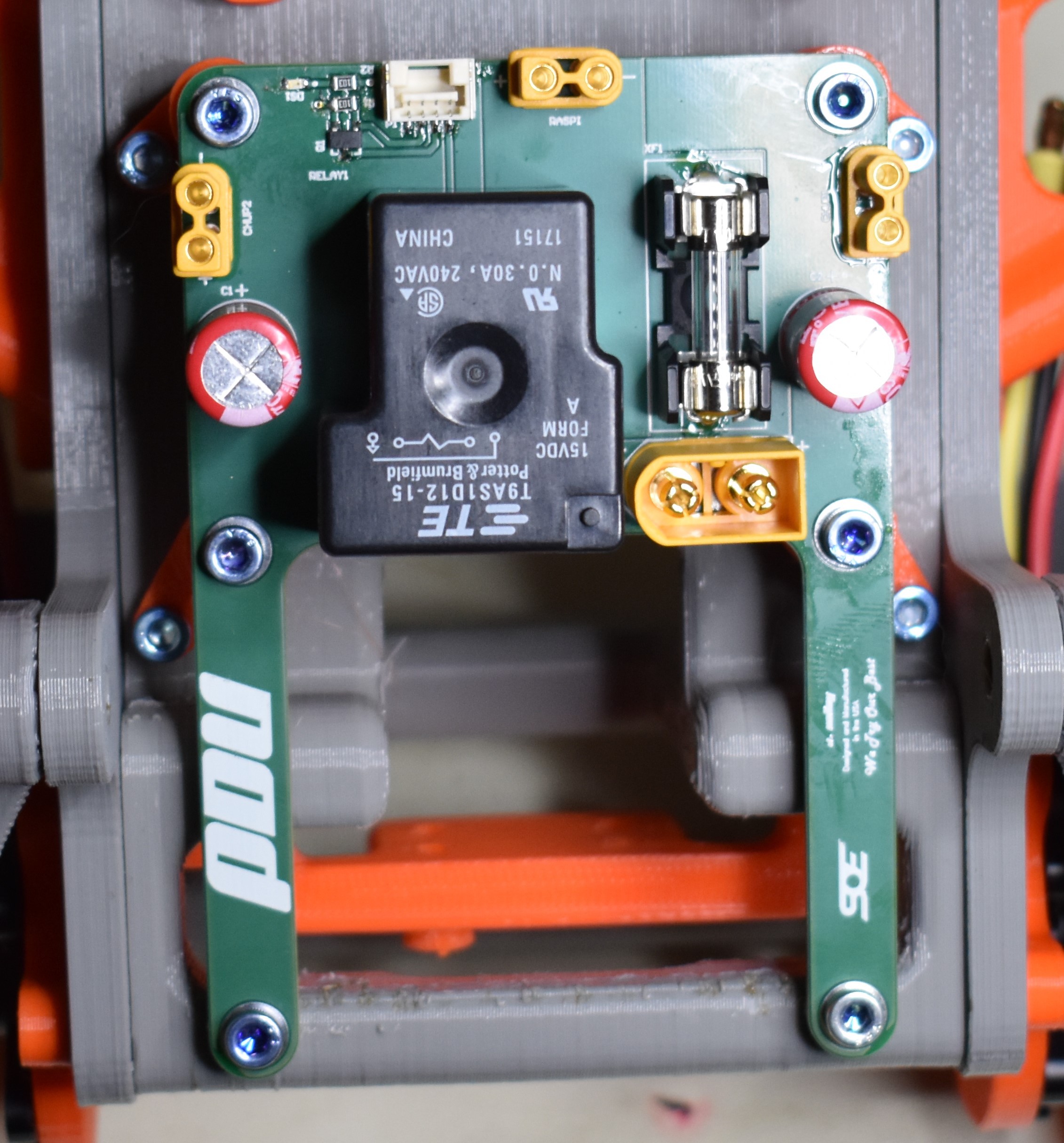
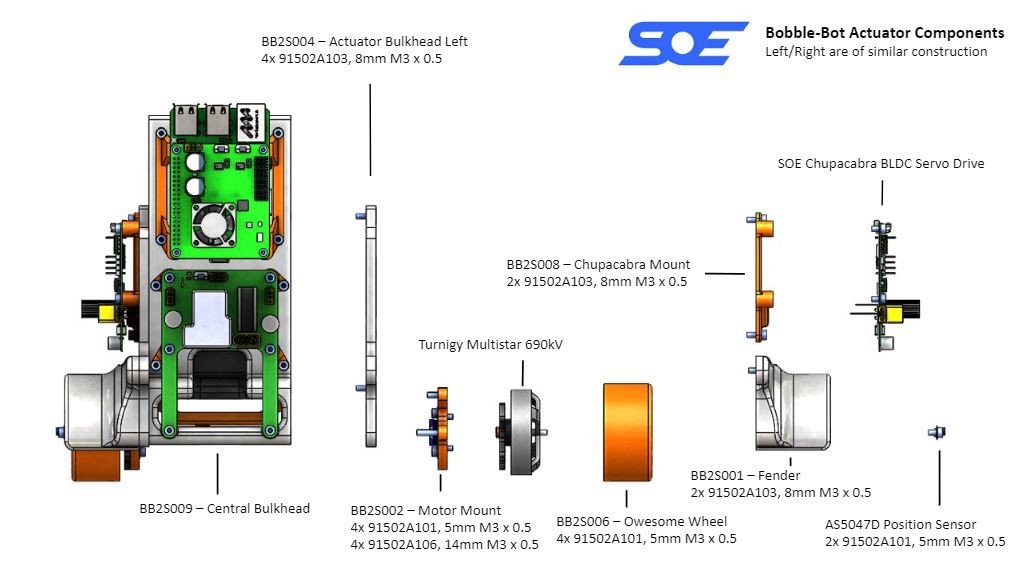
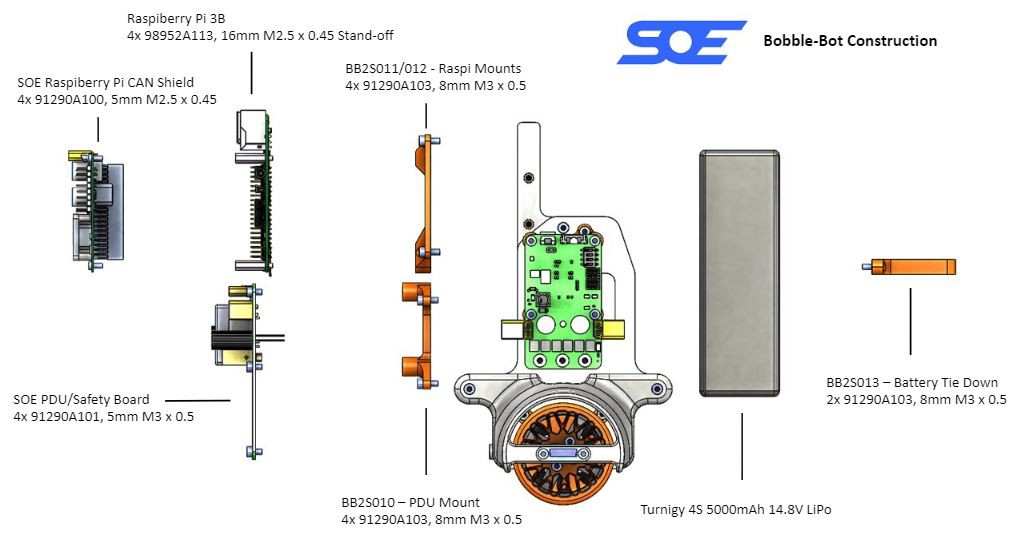
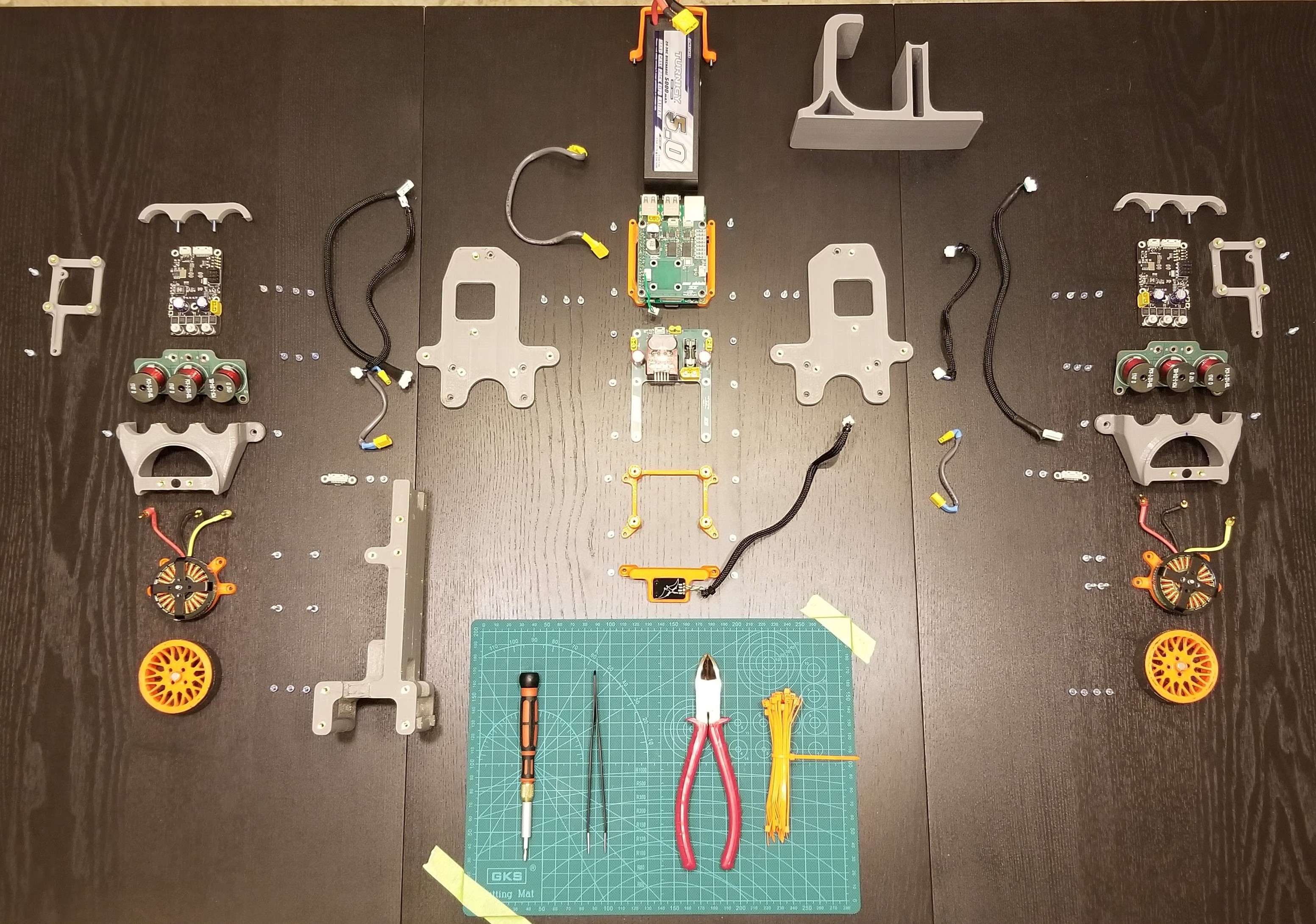
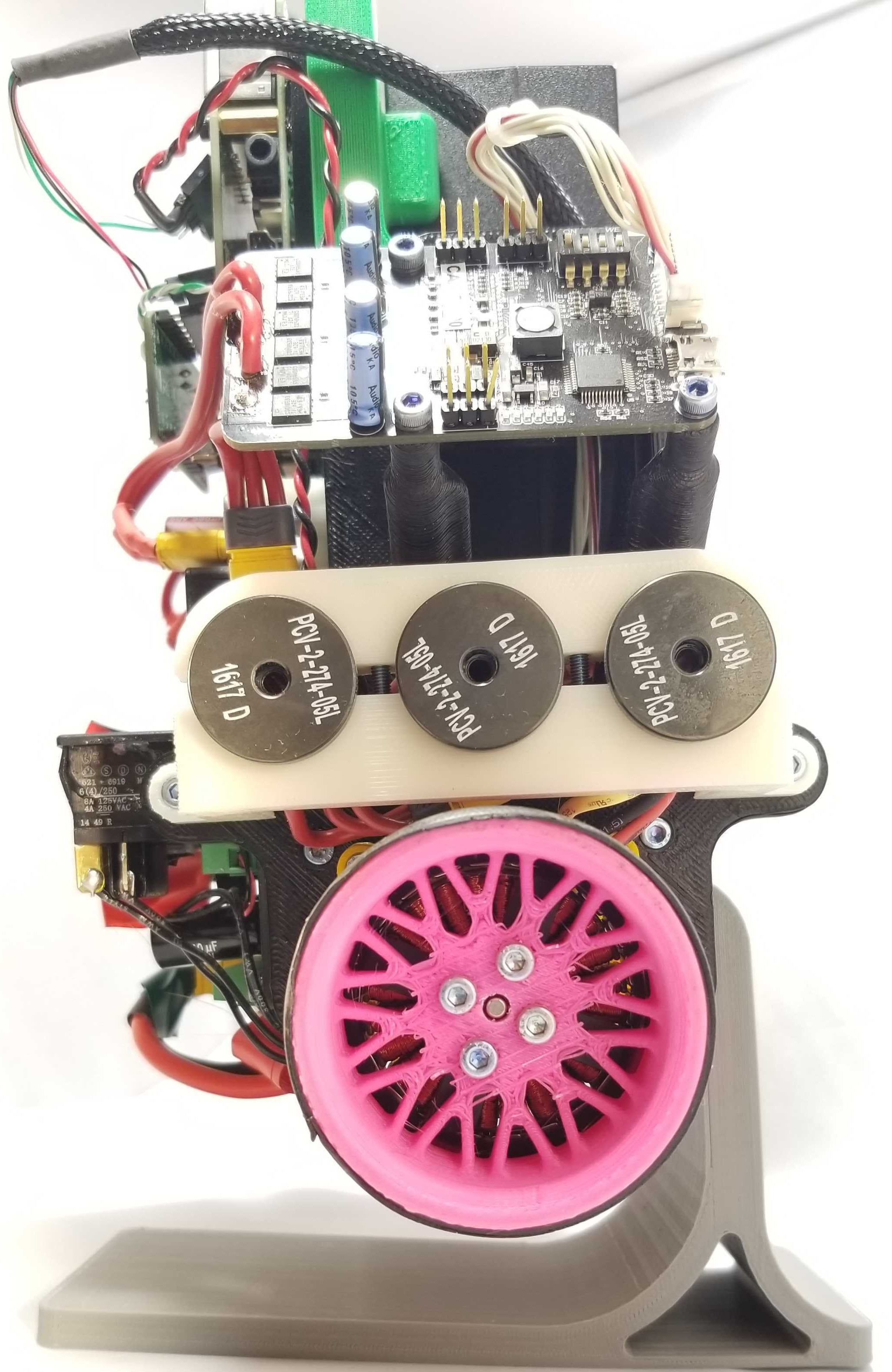
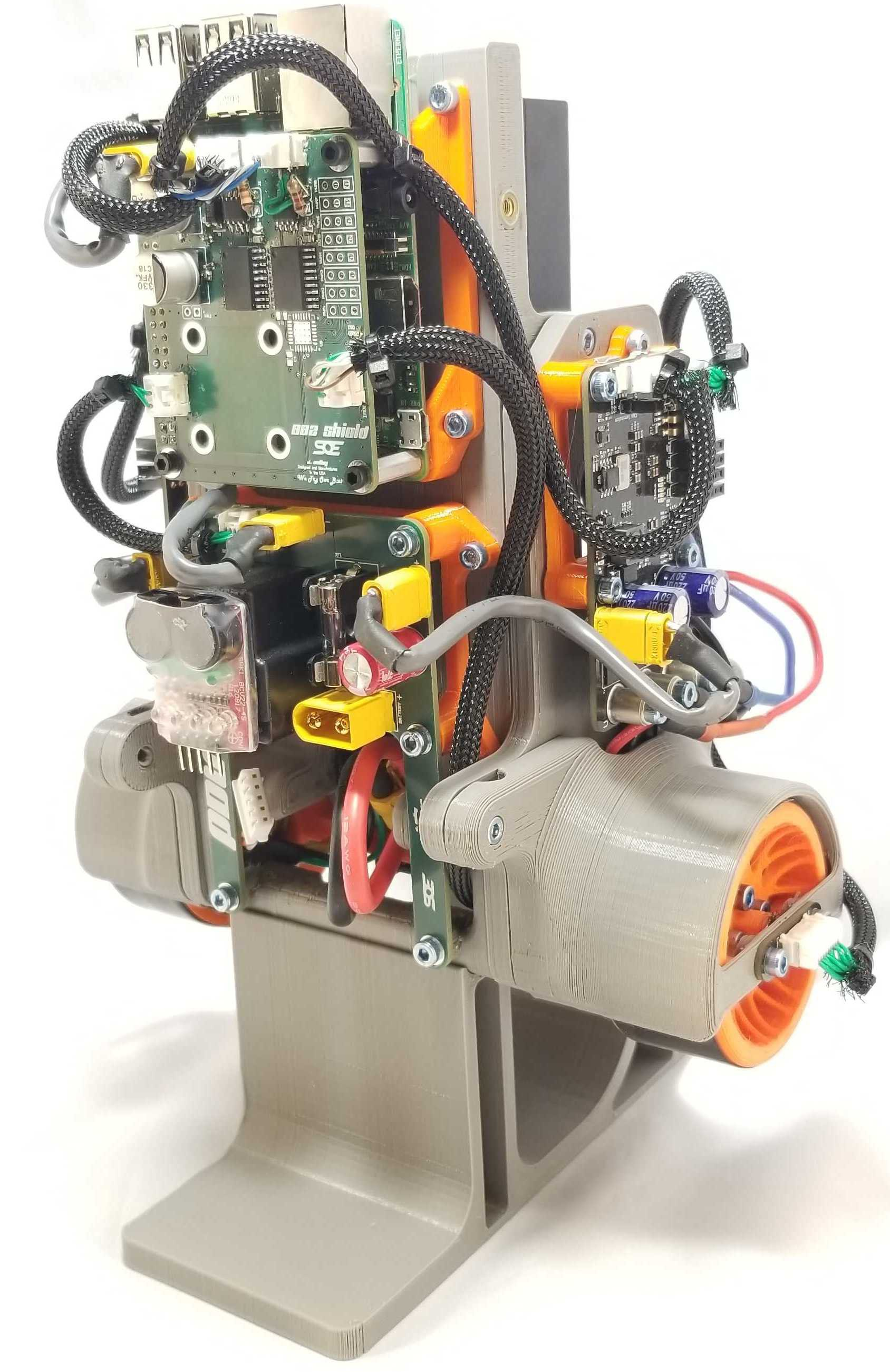
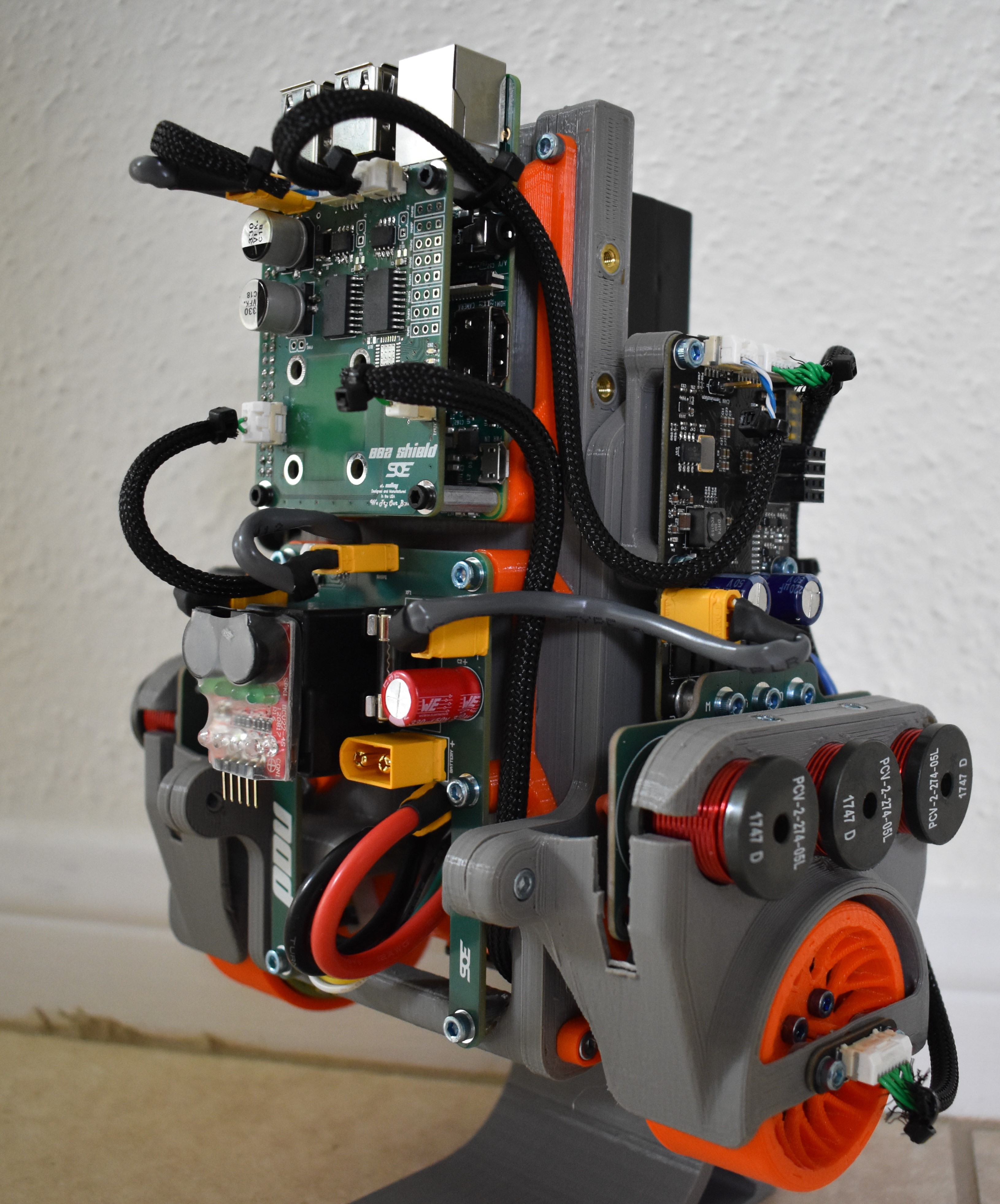
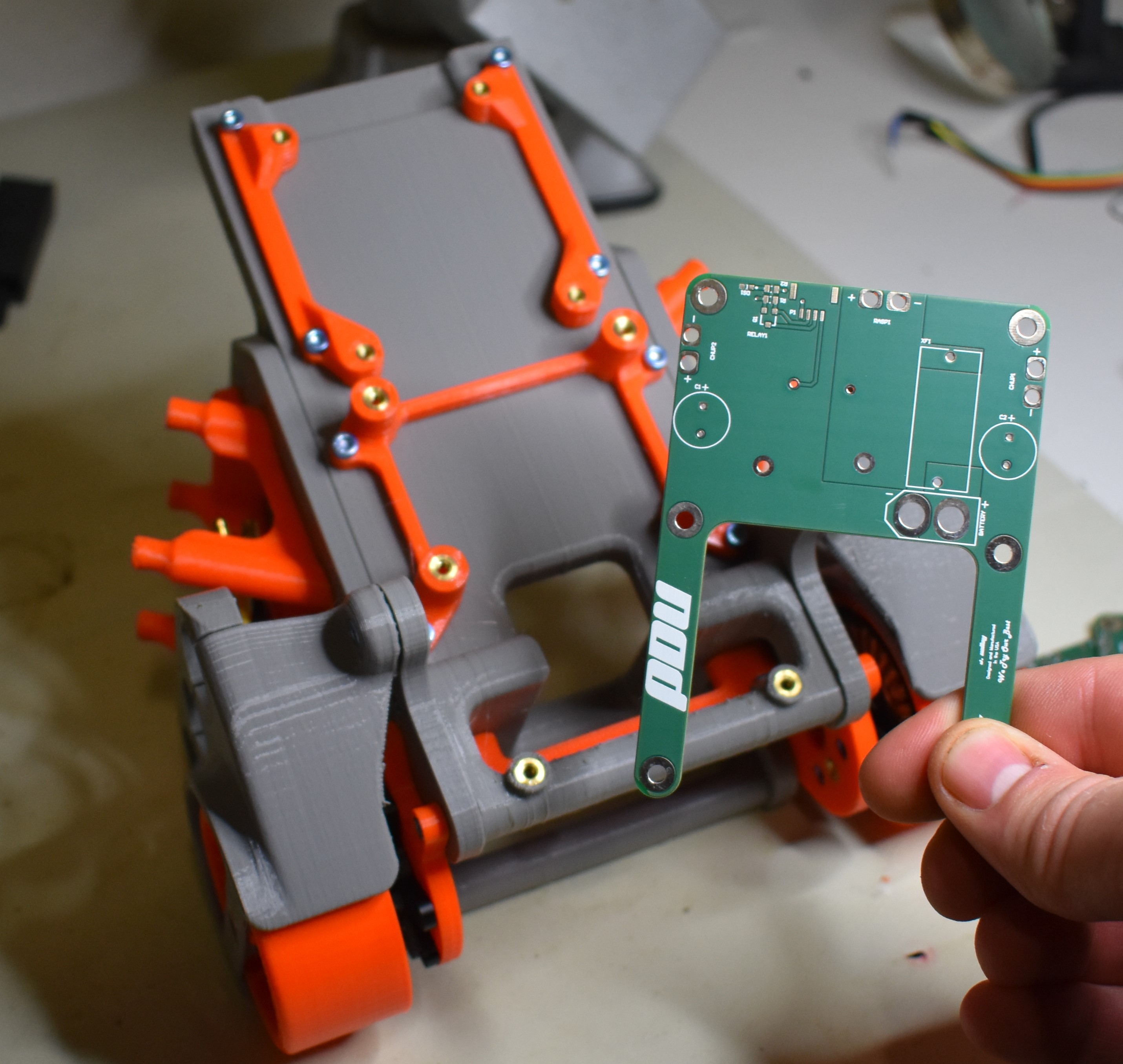
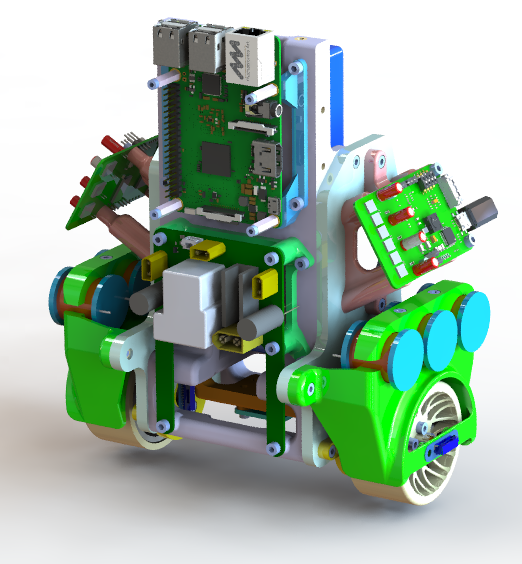
 We've spent the past month getting two new chassis built, color coordinated this time. Getting the first robot built, tested, and controllable took quite a while. The BB2 robot was designed, built, assembled, and disassembled more times than a sane person would care to count. After getting the mechanical design nailed down, it was a simple task to 3D print a couple fresh chassis - not.
We've spent the past month getting two new chassis built, color coordinated this time. Getting the first robot built, tested, and controllable took quite a while. The BB2 robot was designed, built, assembled, and disassembled more times than a sane person would care to count. After getting the mechanical design nailed down, it was a simple task to 3D print a couple fresh chassis - not.














 Yohan Hadji
Yohan Hadji
 Josh Cole
Josh Cole
 Loukas K.
Loukas K.
 Haddington Dynamics
Haddington Dynamics
Do you have gerber files for the boards? I couldn't find them.