Mime Industries
Mime Industries-
We're on Kickstarter
02/07/2017 at 17:54 • 0 commentsSome exciting news (for us at least!) - after a long time in development, which you can follow here, we just launched the MeArm Pi over on Kickstarter - it's already moving along pretty nicely and sitting at 86% funded. There's still some time to get the early bird reward if you move quickly!

-
Running Apps
11/08/2016 at 16:44 • 0 commentsThought it would be good to do a demo showing the apps controlling the Raspberry Pi MeArm. First, here's some more detail on what's actually going on:
- There's a Node.js app which does a few things:
- Controls the servos
- Listens for changes to the joysticks and moves the servos accordingly
- Runs a web server which serves out a bunch of Javascript Browser-based apps (Currently Javascript, Python, Blockly and Snap!)
- Runs a WebSocket server which listens for commands to move the servos
- When you go to the network address of the Raspberry Pi it loads the apps in your browser.
- Each app communicates using the WebSocket to send commands however you program it to
You can also, of course, write your own scripts to program it directly from the command line, but this is a nice easy way of getting started by running things like Blockly in your browser.
Anyway, without further ado, here's the quick demo:
- There's a Node.js app which does a few things:
-
Demo
11/08/2016 at 07:35 • 0 commentsHere's a quick demo of the unit I built up to make the instructions working nicely.
-
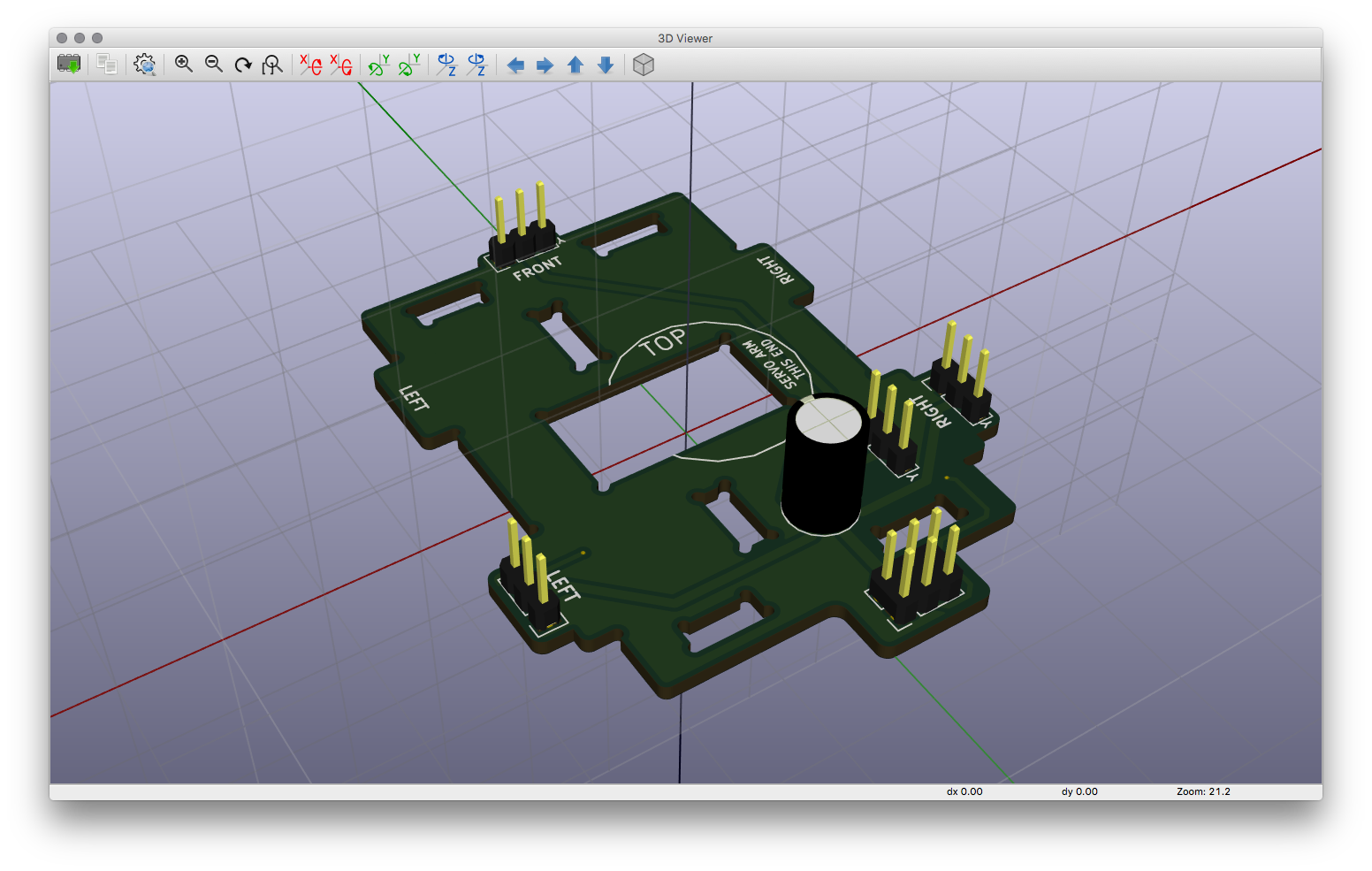
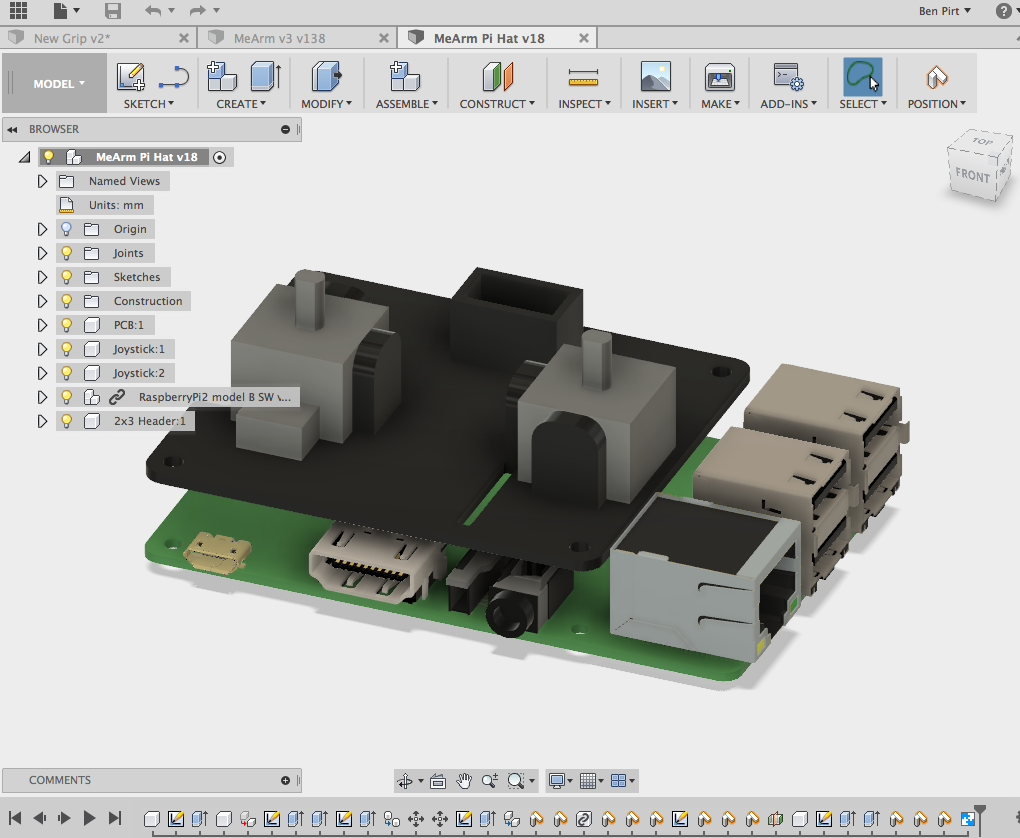
New HAT PCB just in!
11/04/2016 at 16:30 • 0 commentsExciting - I just built up the latest PCB for the Pi HAT, check it out:
It's got a few changes from the previous version:
- Uses the low profile through-hole header sockets so it sits lower for a more streamlined enclosure
- It has an RGB LED on board for status indications, driven from the GPIO pins of course
- All of the surface mount components are on the underside now to make manufacturing a bit easier
Now I just need to modify the mechanical design for the new dimensions and I'll be able to do a full build to put up here next week.
-
New grip demo
11/04/2016 at 13:03 • 0 commentsHere's a quick video showing how easy it is to put the new grip together:
-
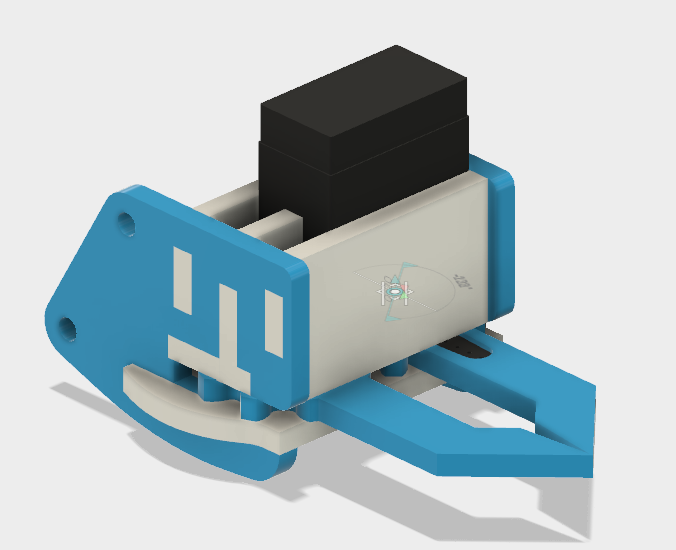
Improving the grip design
11/04/2016 at 11:13 • 0 commentsI've put some effort into improving the stability of the mechanical design for the grip. Here's what it was like before:
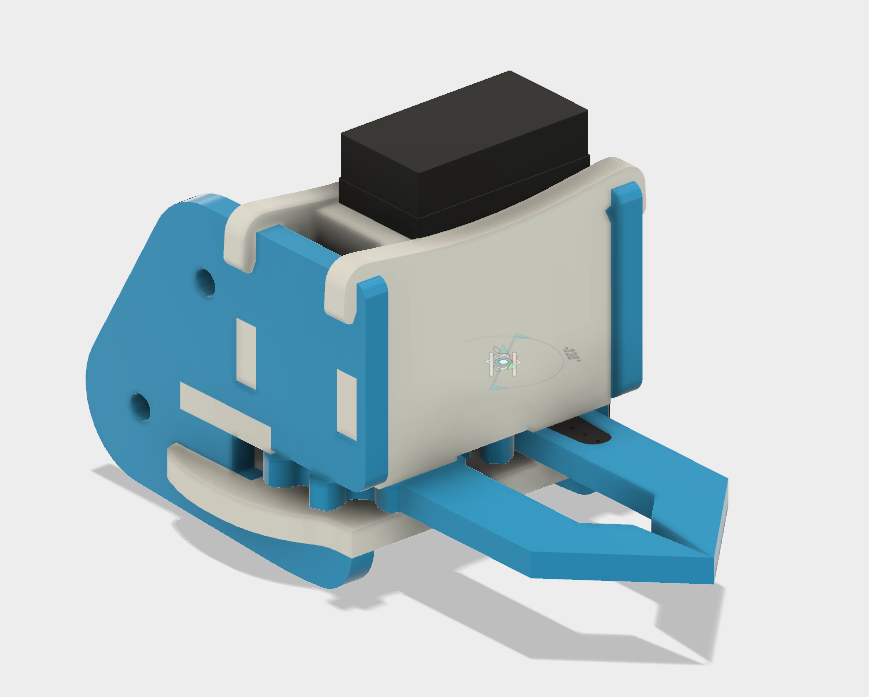
You can see that the blue sides push on and then are held in place by the base which slides in. I found that the top of the sides ended up quite loose which is no good. Here's the improved version:
The blue sides now hook under the white tabs at the top and then their bottoms are locked in place by the sliding base. It's a variant of the assembly technique used in Mirobot but it's quite a neat trick that I'll detail in another update. One of the side effects of this technique is that there are a lot fewer screws used in the grip now; it's down to 1 from 9! There's a single screw which now locks everything together.
-
First Prototype Up and Running
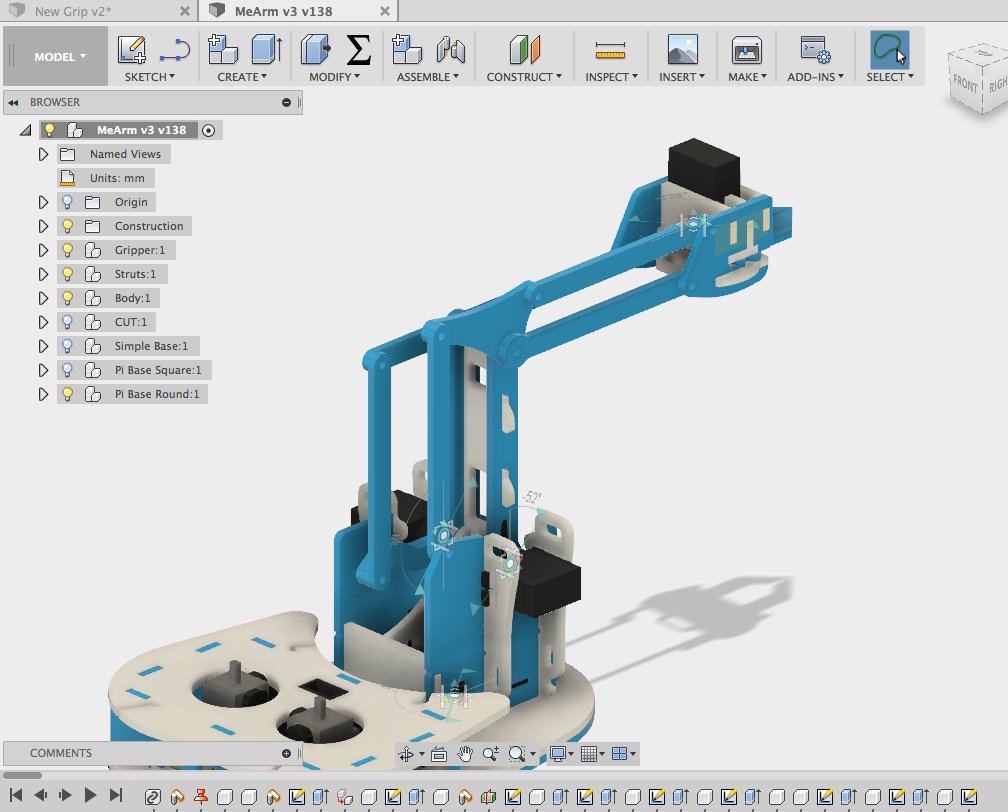
10/20/2016 at 16:25 • 0 commentsAfter getting my head down and working hard to get the redesigned MeArm mechanicals with the Raspberry Pi base up and running, we were pleased to be able to show a few people the working prototype at last weekend's Maker Faire in Rome. Here are the big things I've been working on:
Simpler mechanical design - after spending some time learning Fusion 360 I was able to fully model the arm mechanicals and use it to simplify some of the mounting mechanisms to eliminate the need for screws.
The side-mounted servos are now held on with some clips, which seem to work really well. The base is held together with a couple of elastic bands, which are a nice, solid way of holding everything together without needing more screws and captive nuts. The grip has been redesigned to make it much simpler, with less parts, so easier to build. The only places there are still screws in this design are where there are joints because they still work well there.
Neater Cable Routing - one of the more radical changes has been to use a PCB as the base of the arm, which means that the cables can be clipped straight on to the base, and then one cable can lead from that base to the Pi HAT.
It makes it much less likely for the servo cables to snag and means the cable from the grip servo no longer needs an extension. If you're making this yourself it's still easy to just switch the base out for a bit of acrylic so you don't need to get PCBs made.
Pi HAT - It wouldn't be a Pi MeArm without a Pi HAT. It's got a couple of joysticks running into a I2C ADC chip that means the Pi can read the state of them directly. I'll do another update on this in the future...
MeArm Raspberry Pi Edition
A robot arm kit that works with the Raspberry Pi