0%
0%
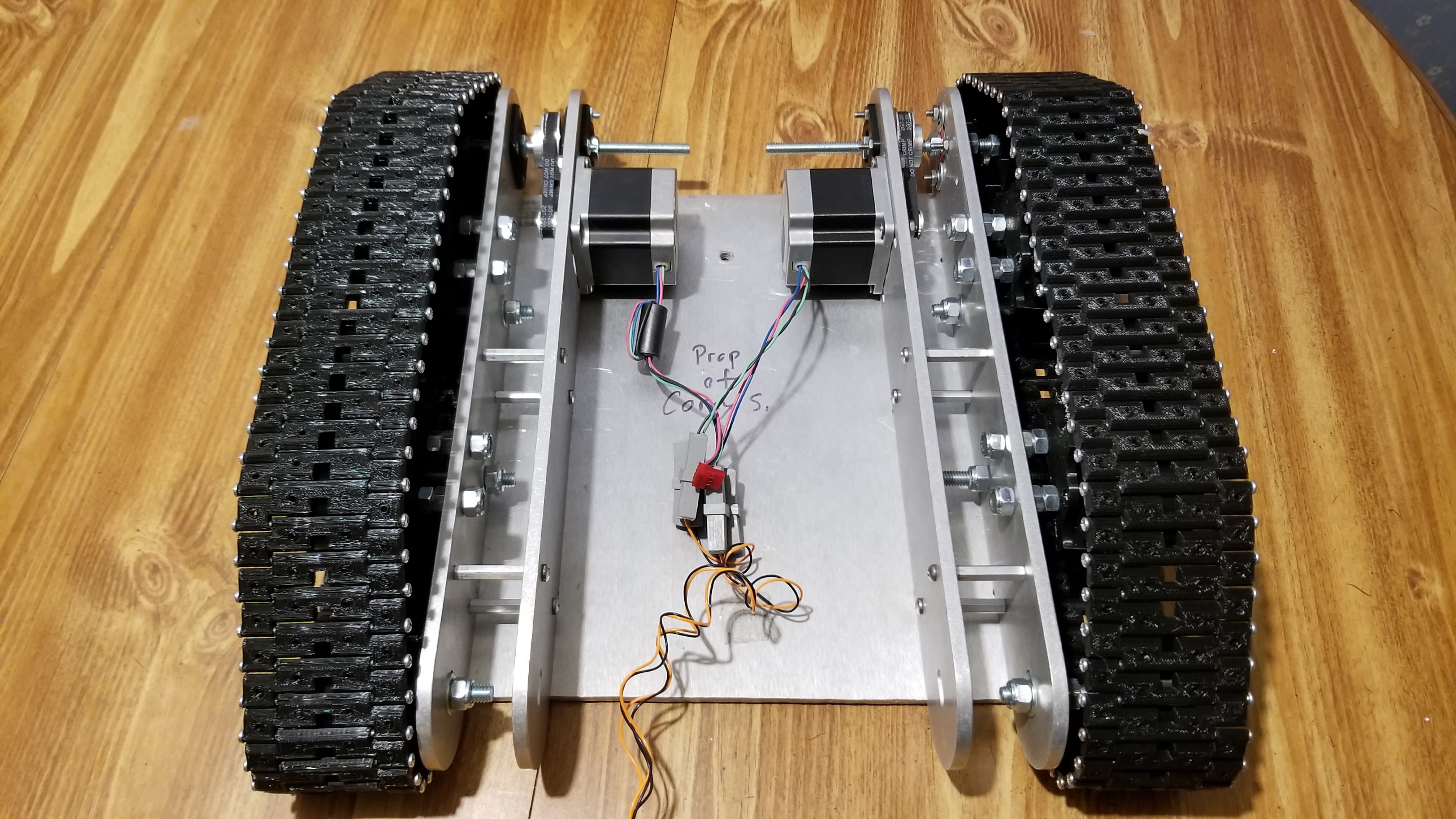
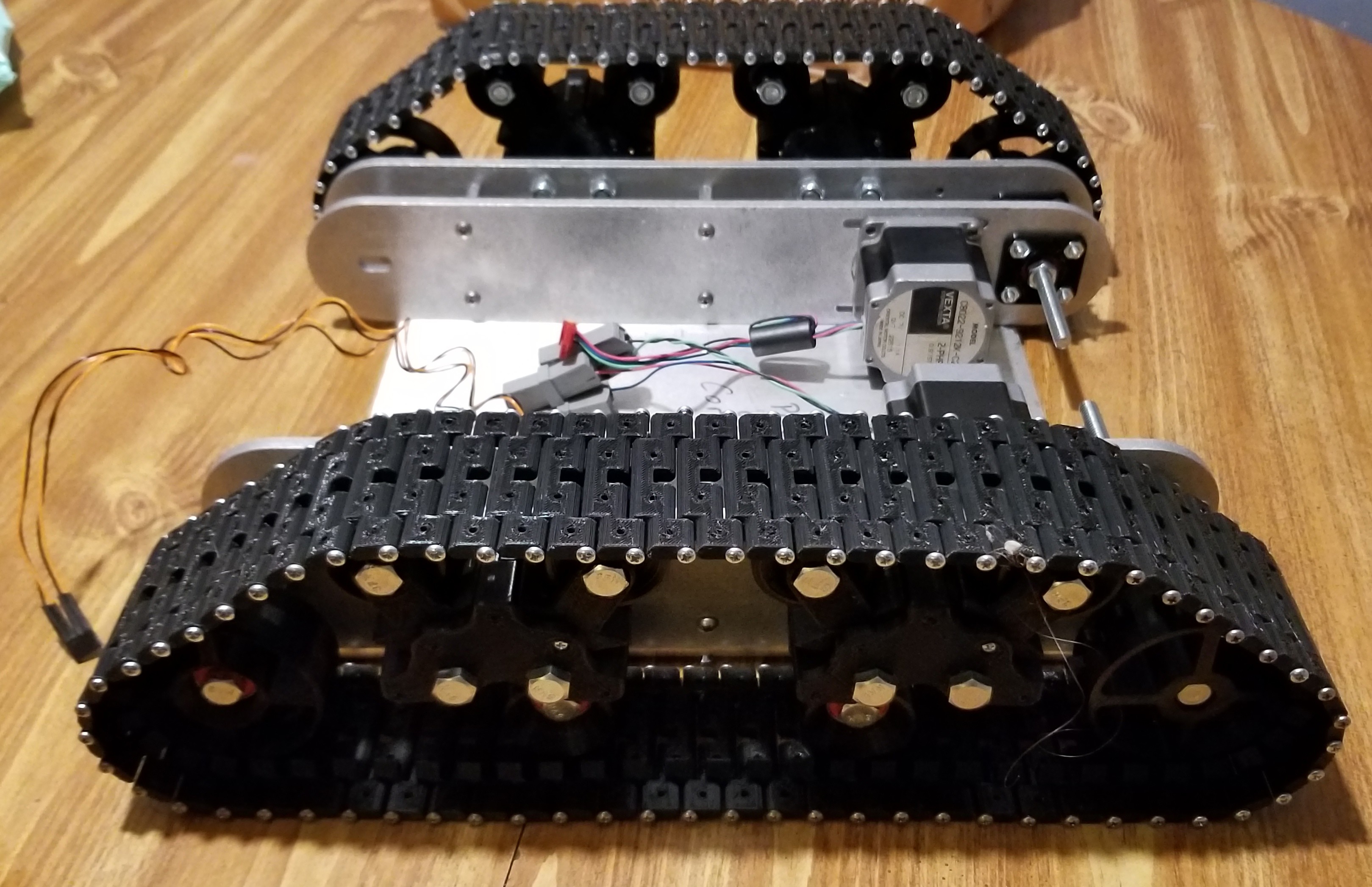
Robot Tank /w Jetson Nano
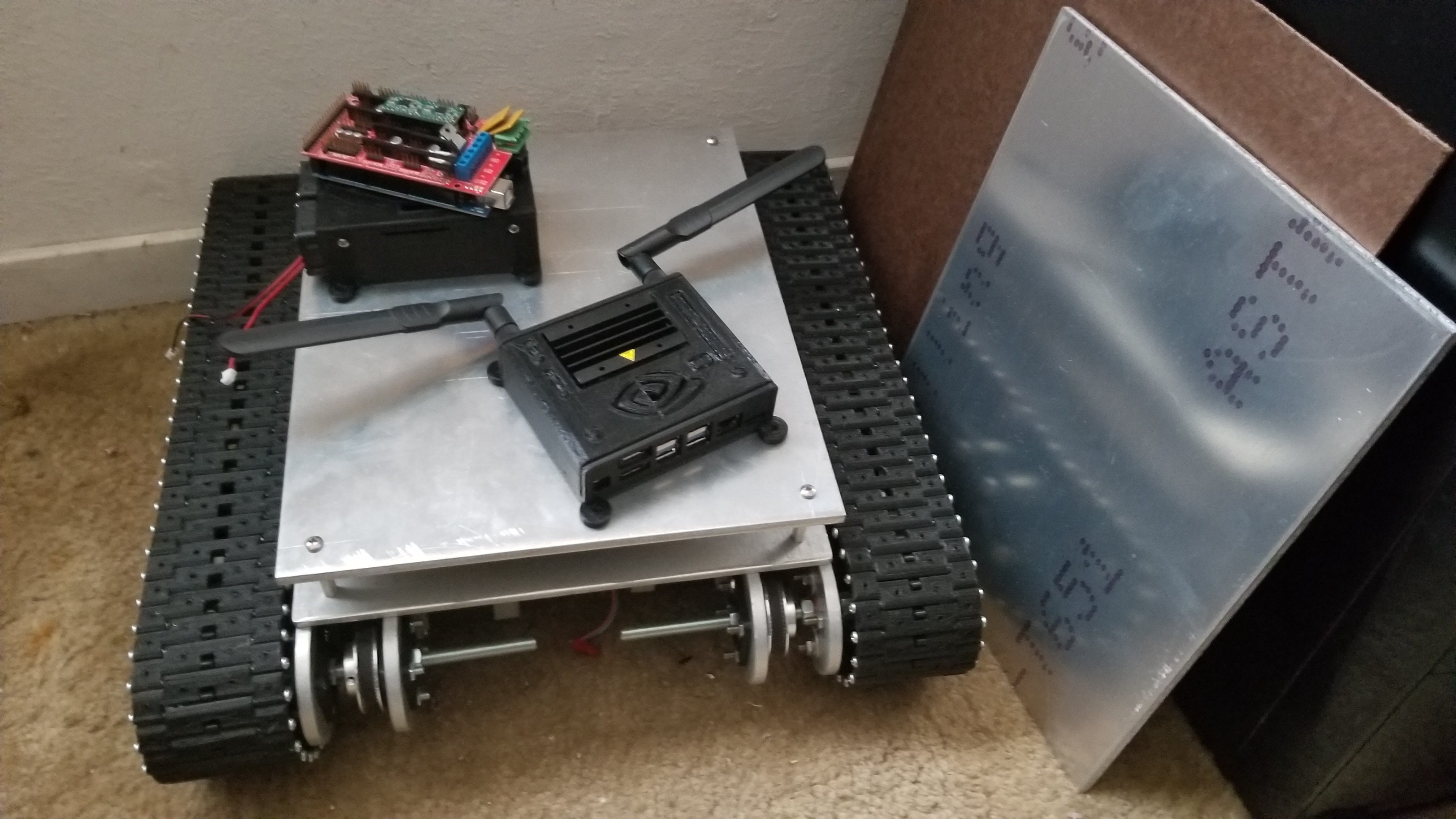
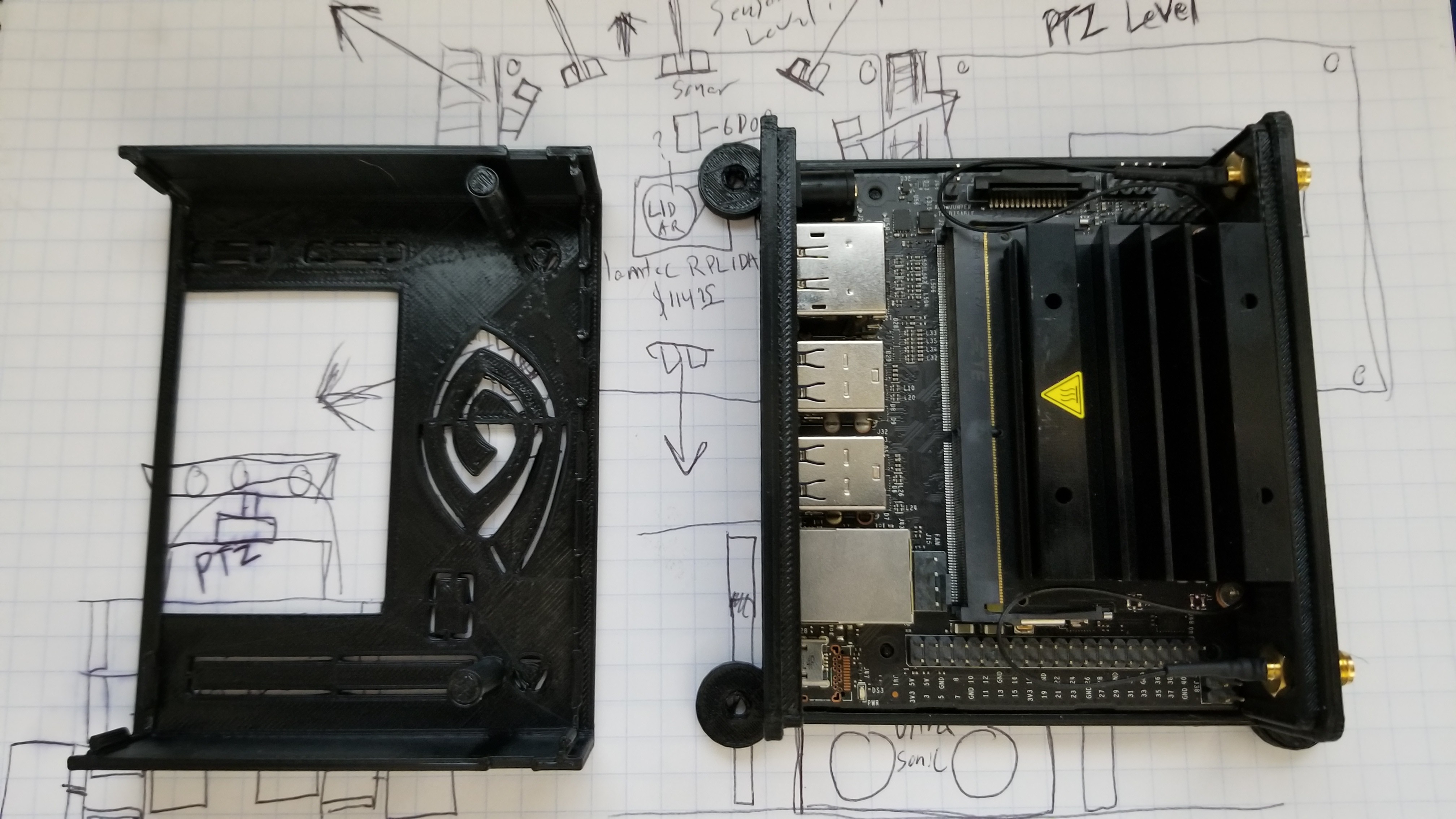
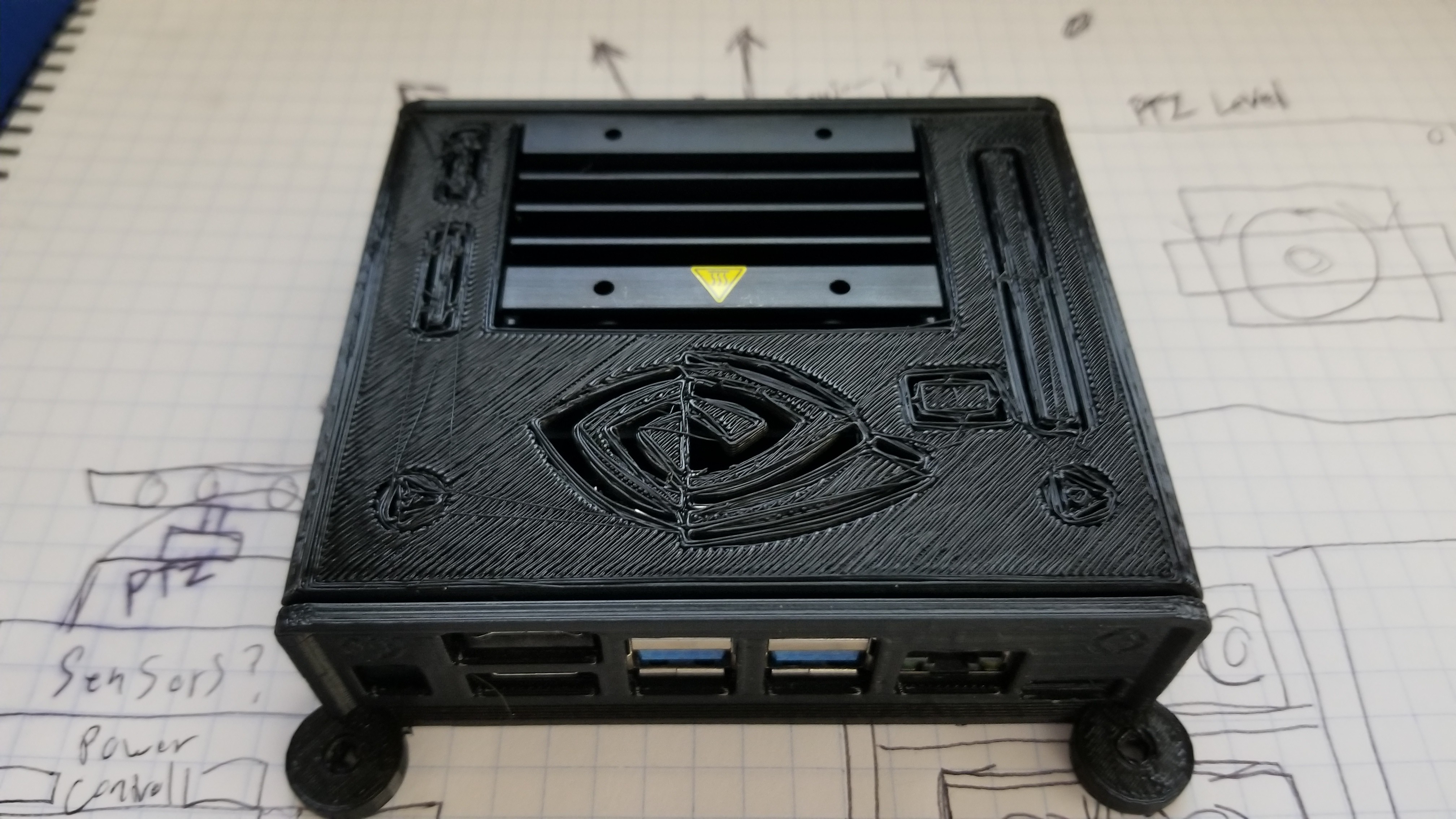
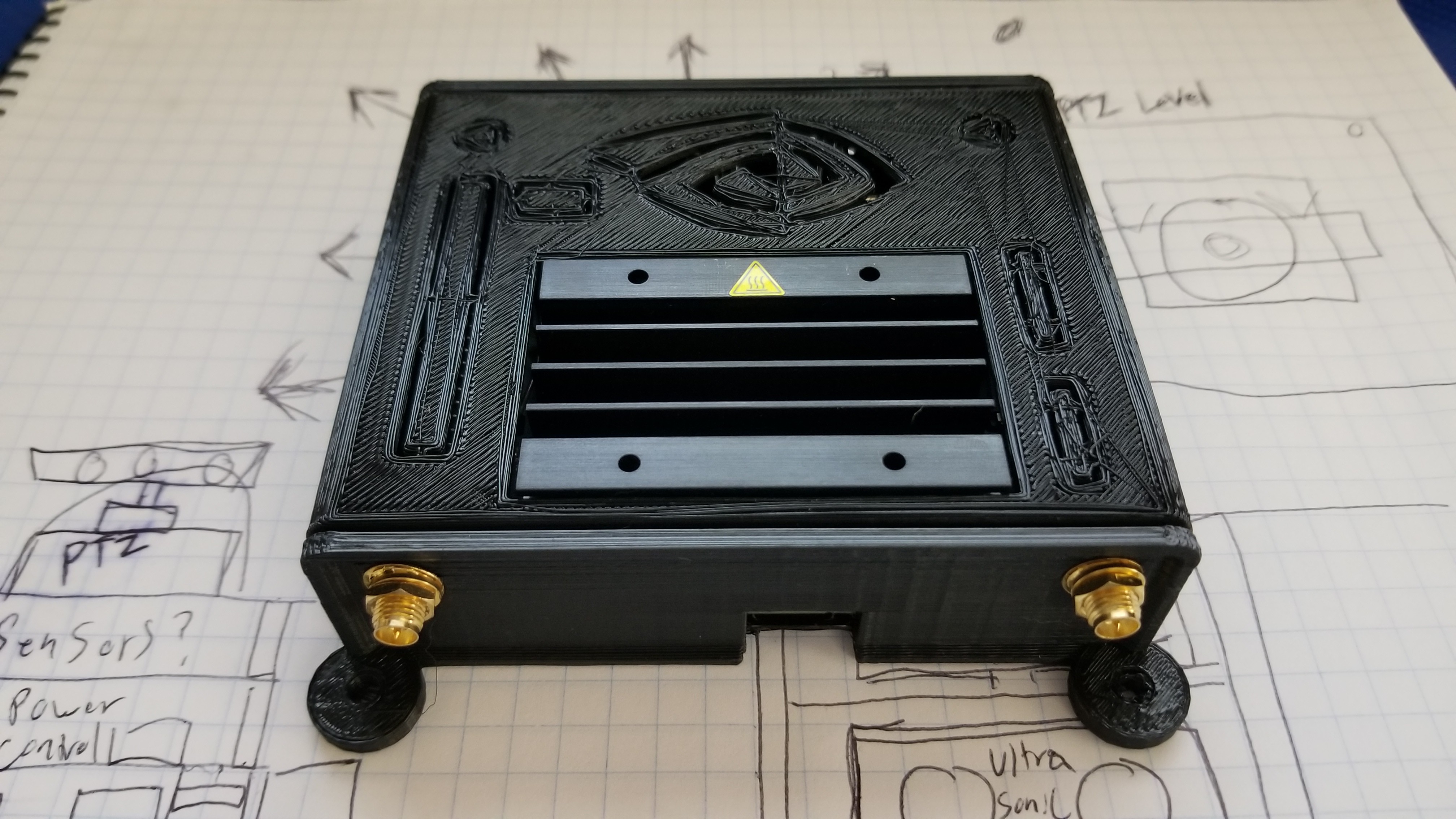
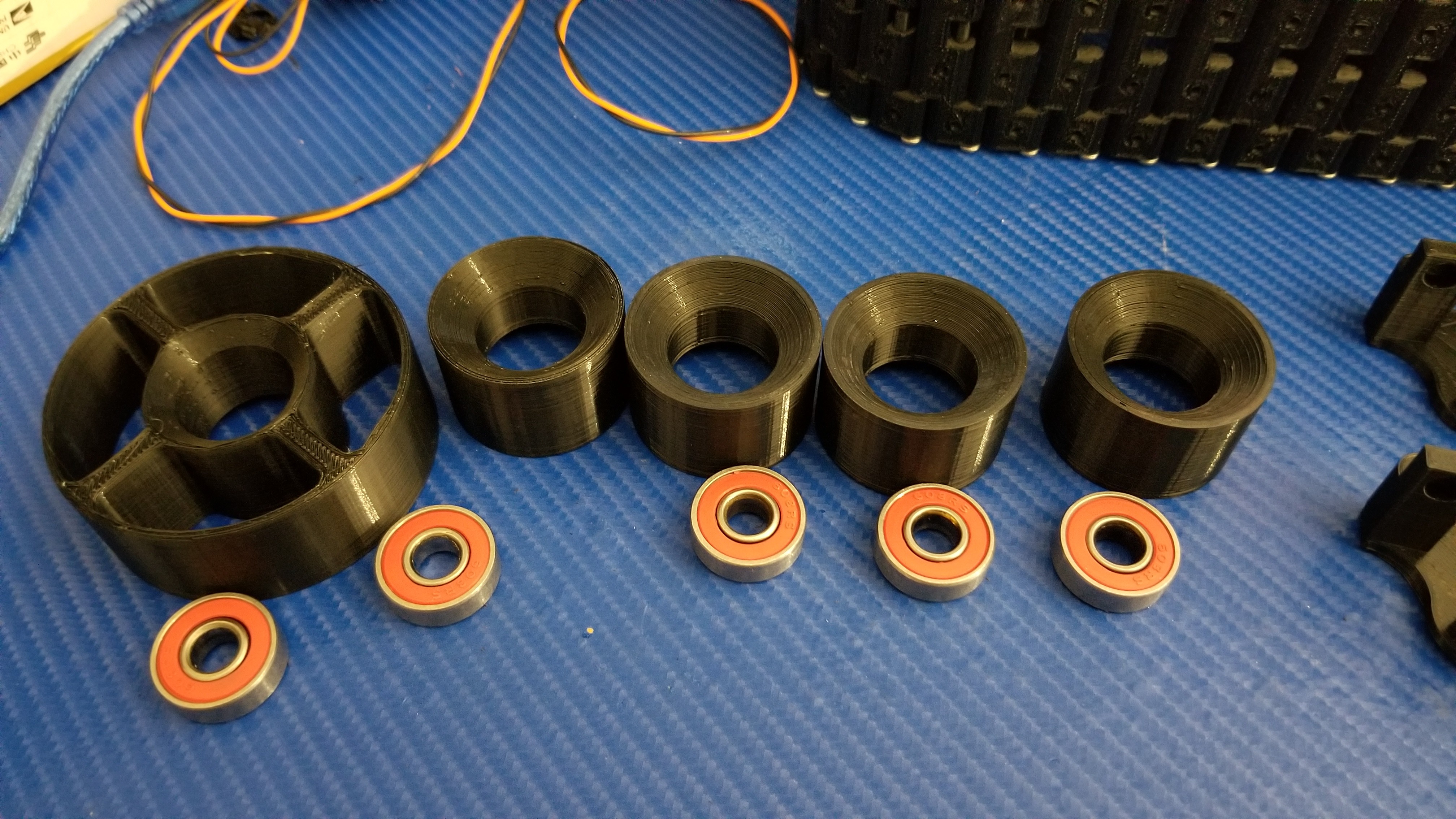
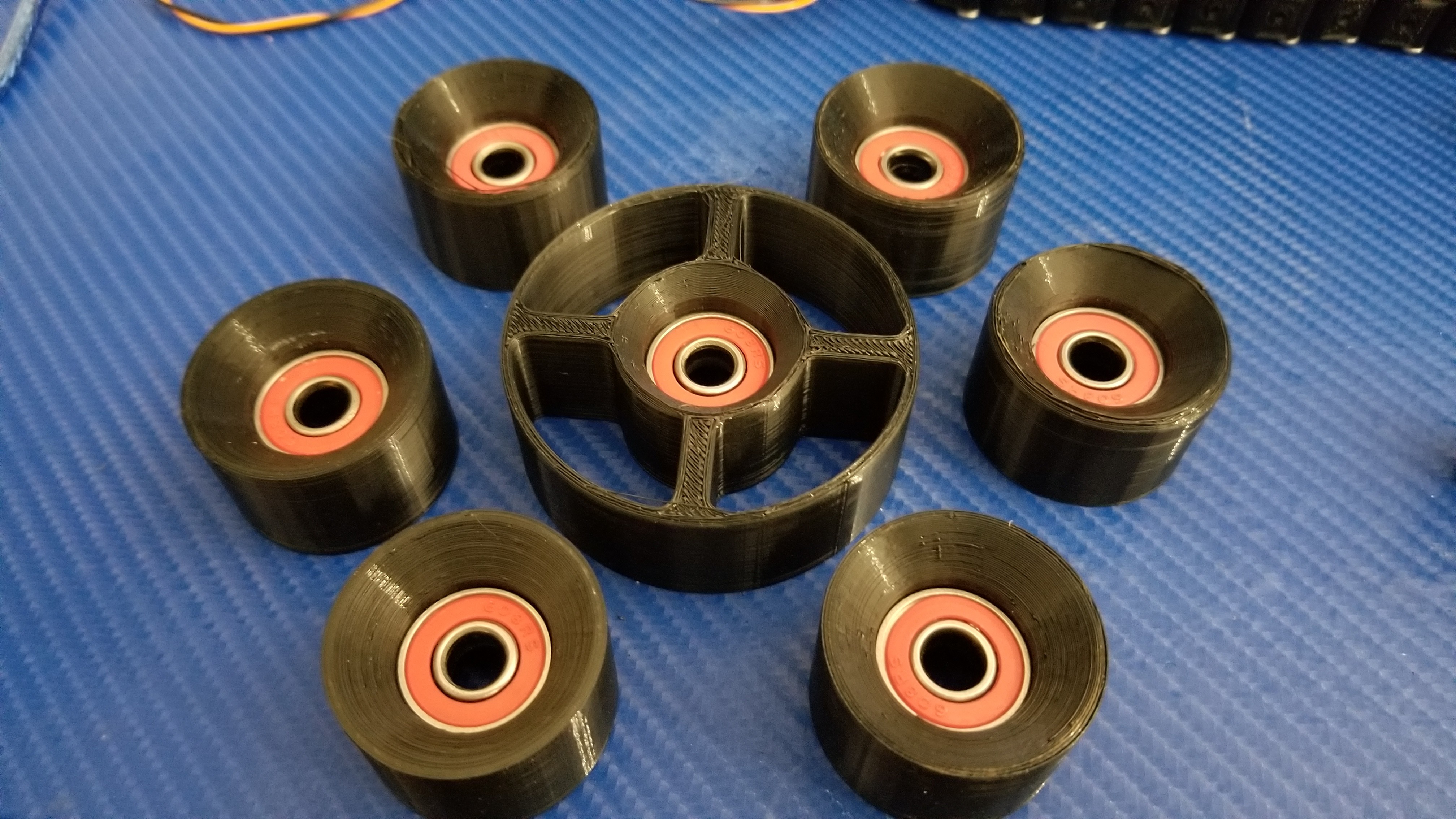
Starting work on a tank track robot. Purchased a Jetson Nano for the main controller brain. Arduino Mega + Ramps for motor control
 pRoFiT
pRoFiTBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Paul Crouch
Paul Crouch

 E/S Pronk
E/S Pronk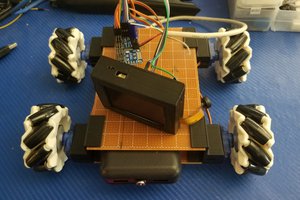
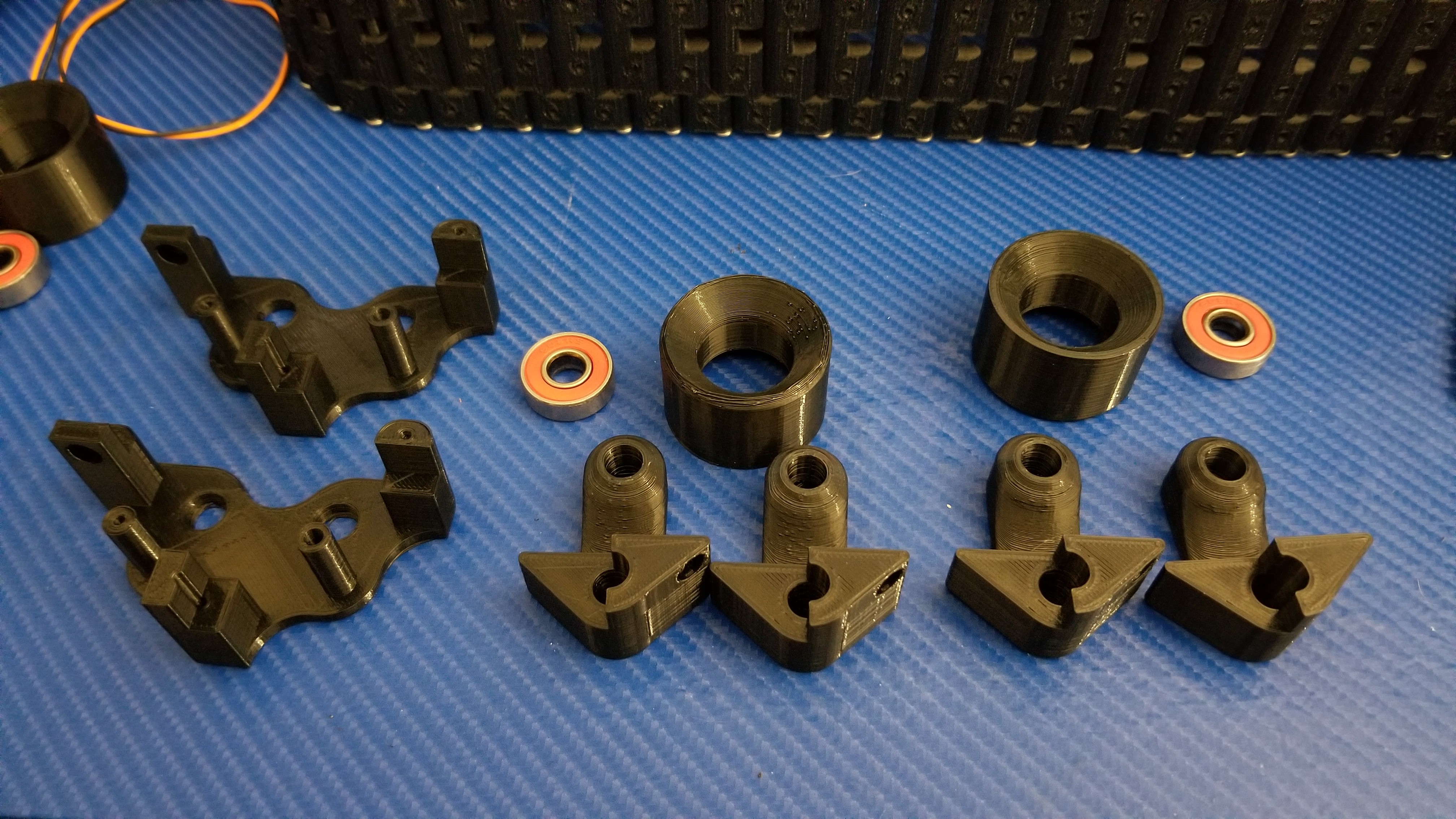
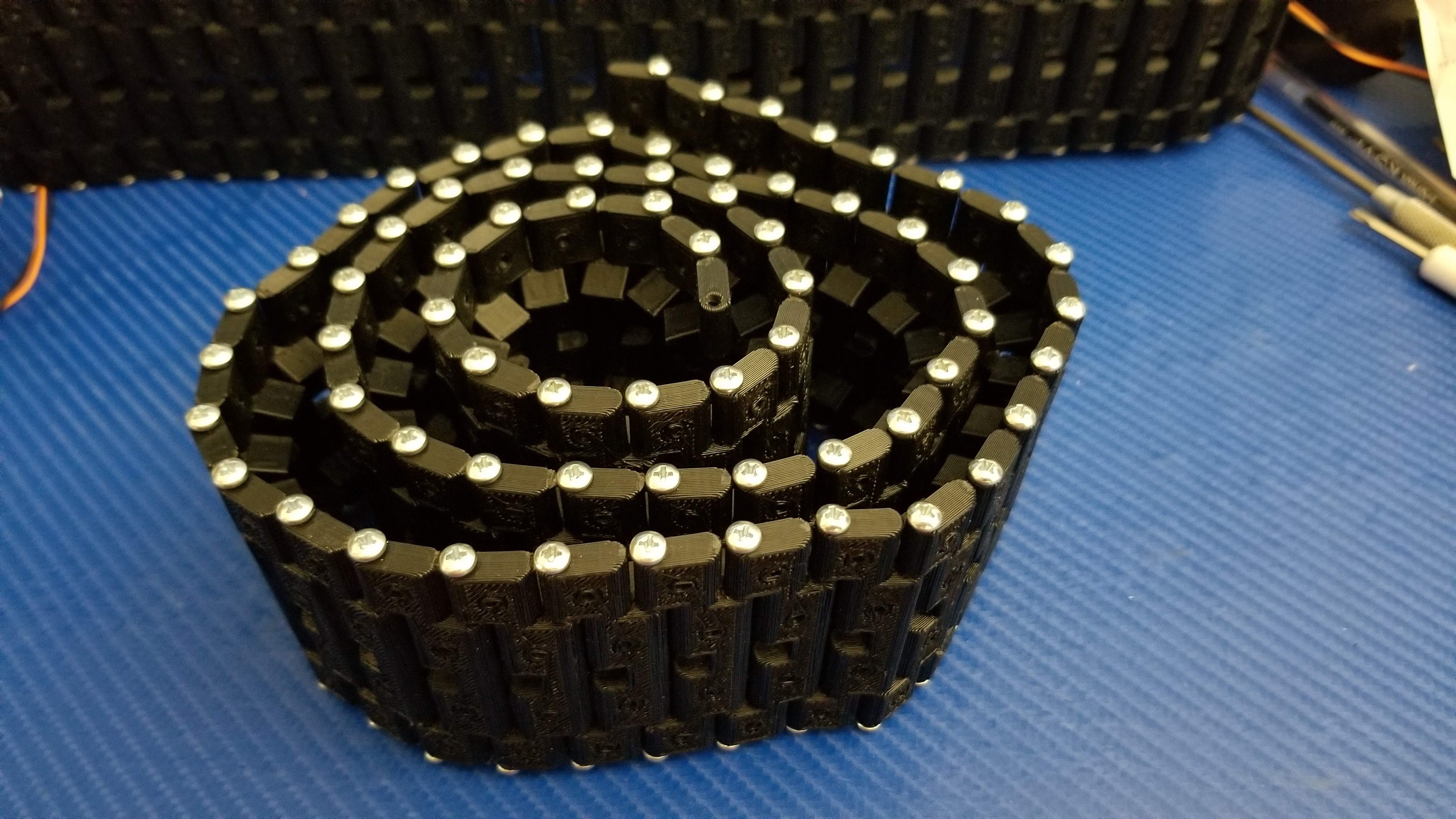
Wow, is that suspension system for the treads your original design? Look like a good method to help keep the vibrations from shaking the body of the robot apart. Are you happy with the results so far?