 Kyle Isom
Kyle Isom-
1Step 1
Assemble the chassis as per the video and and http://www.cs.columbia.edu/~sedwards/presentations/robot-car-instructions.pdf, skipping the servo parts.
Some notes:
- I put a nut between the battery pack and the chassis to help clear the screws from the castor wheel.
-
2Mount the sensor brackets to the front.
![]()
-
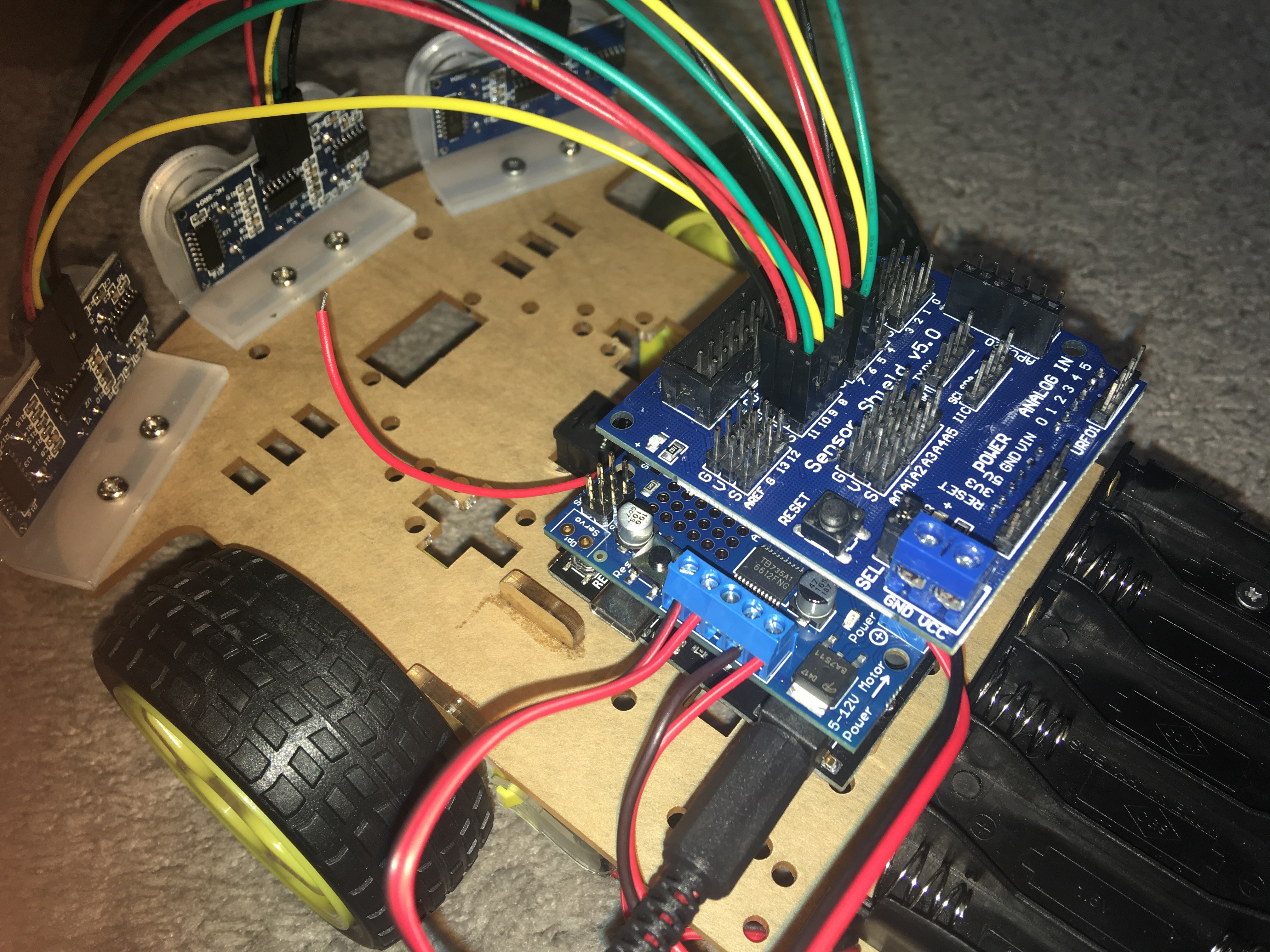
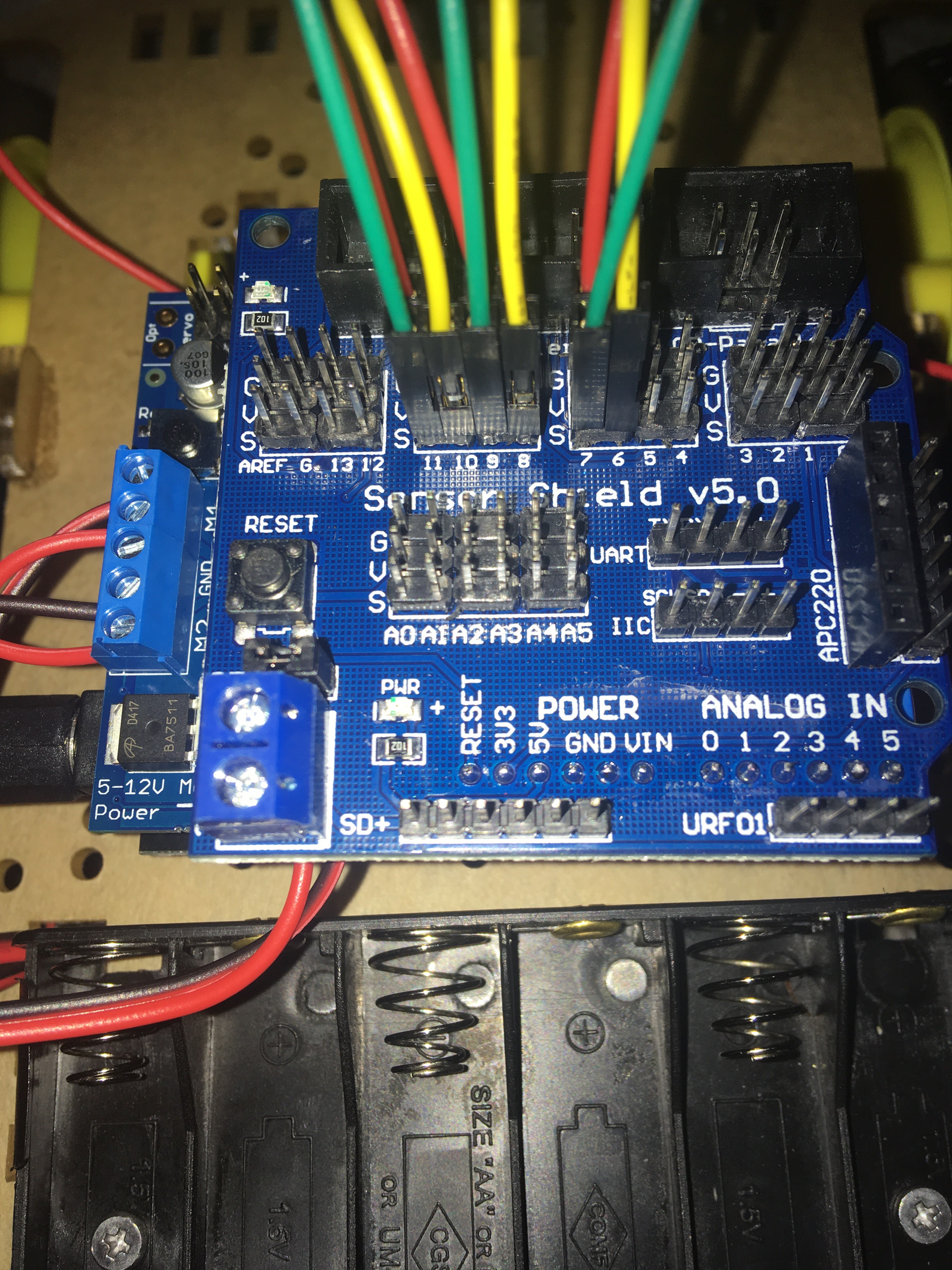
3Wire the sensors
I've connected the sensors as
- Left: TTL on D10, echo on D11
- Front: TTL on D8, echo on D9
- Right: TTL on D6, echo on D7
![]()
-
4Connect the batteries
Connect the loose wires in the battery pack to the motor controller power in and plug the barrel jack into the Blackboard / Arduino.
I haven't wired up the power switch yet.
-
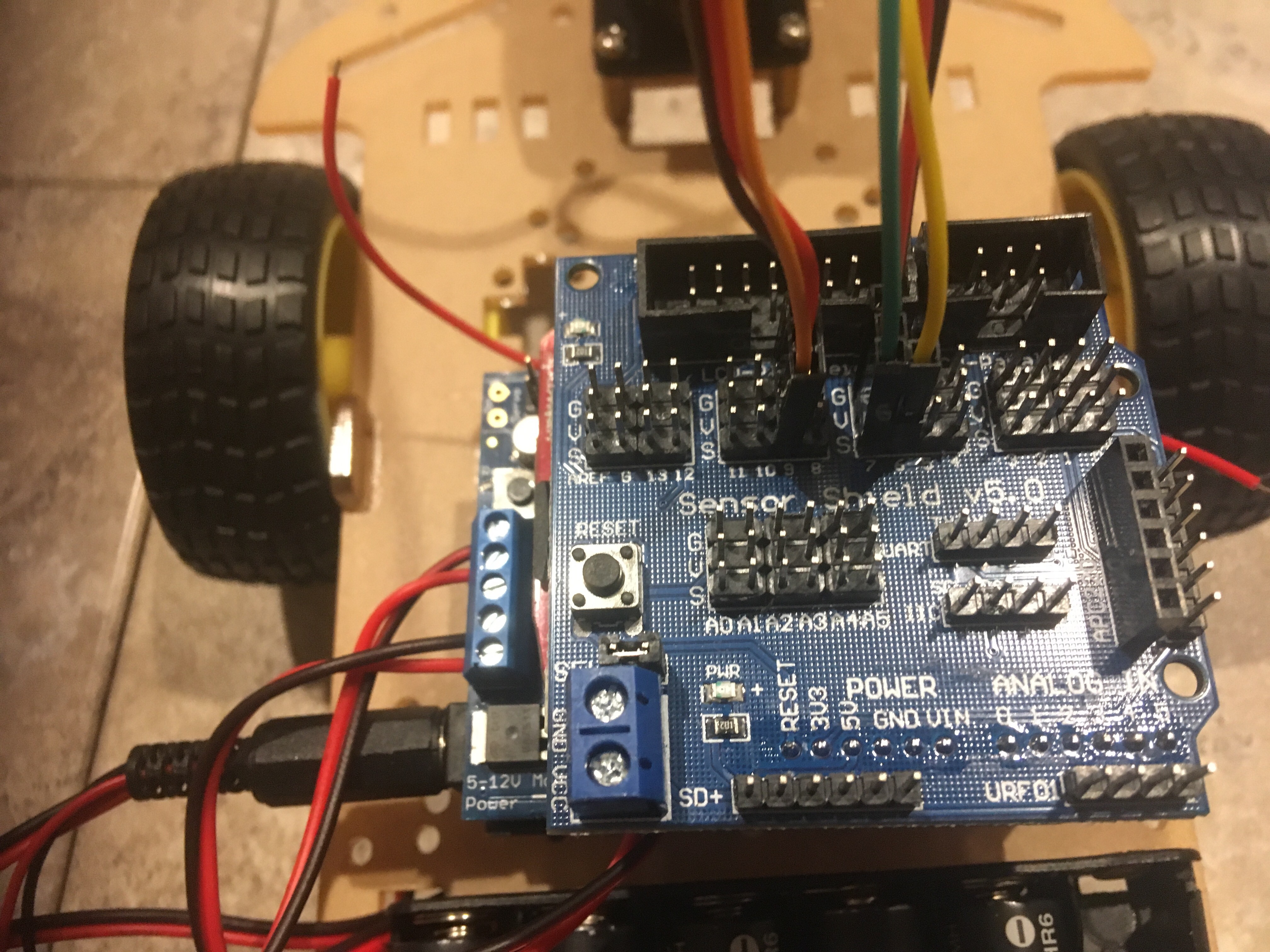
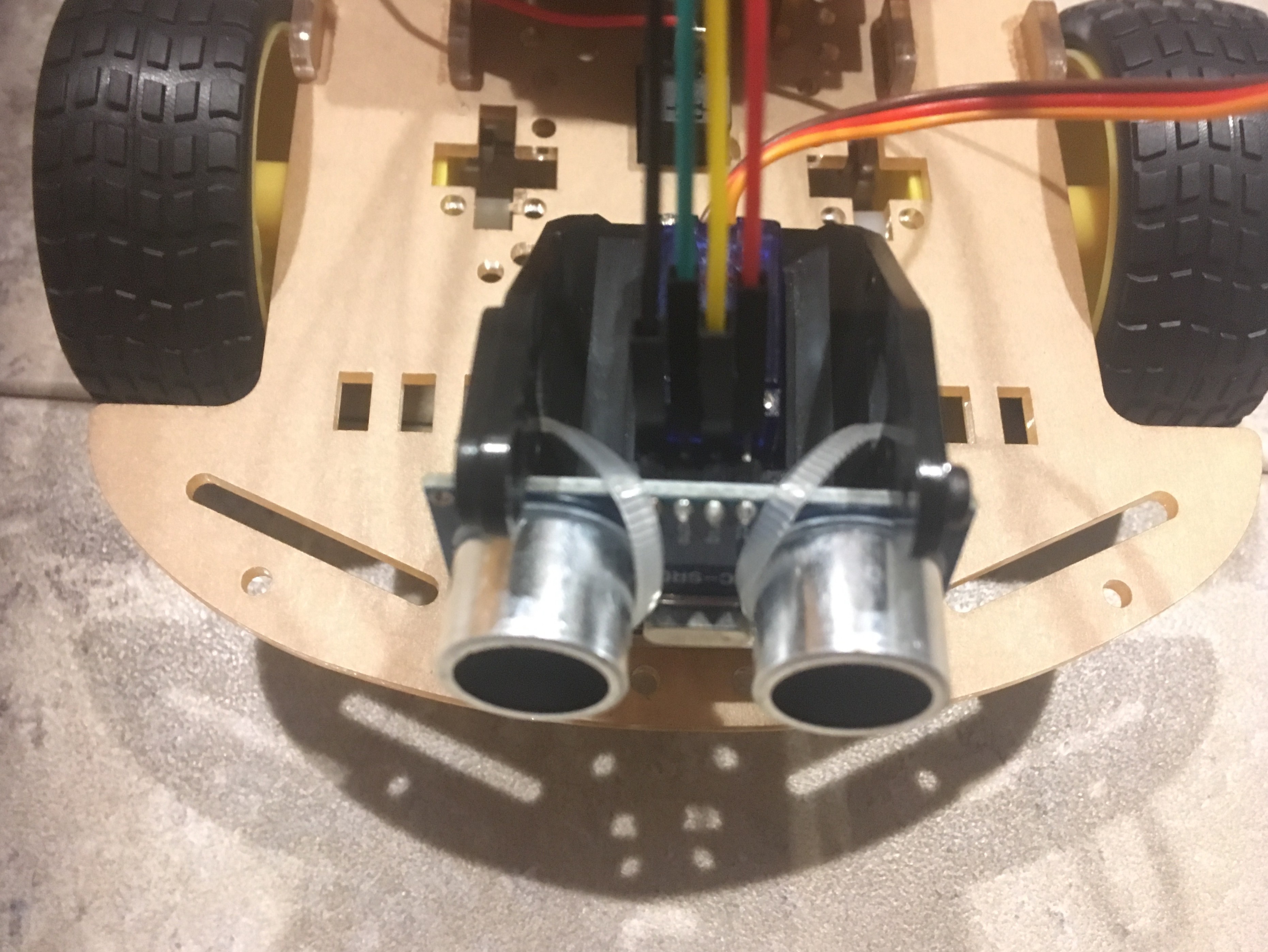
5[Optional] Replace the motor brackets with a servo-mounted sensor.
I went back to a pan/tilt sensor that came with the kit.
![]()
![]()
It's assembled as per the instructions; the servo is connected to pin 9 and the sensor is connected to TTL->6, echo->7.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.