0%
0%
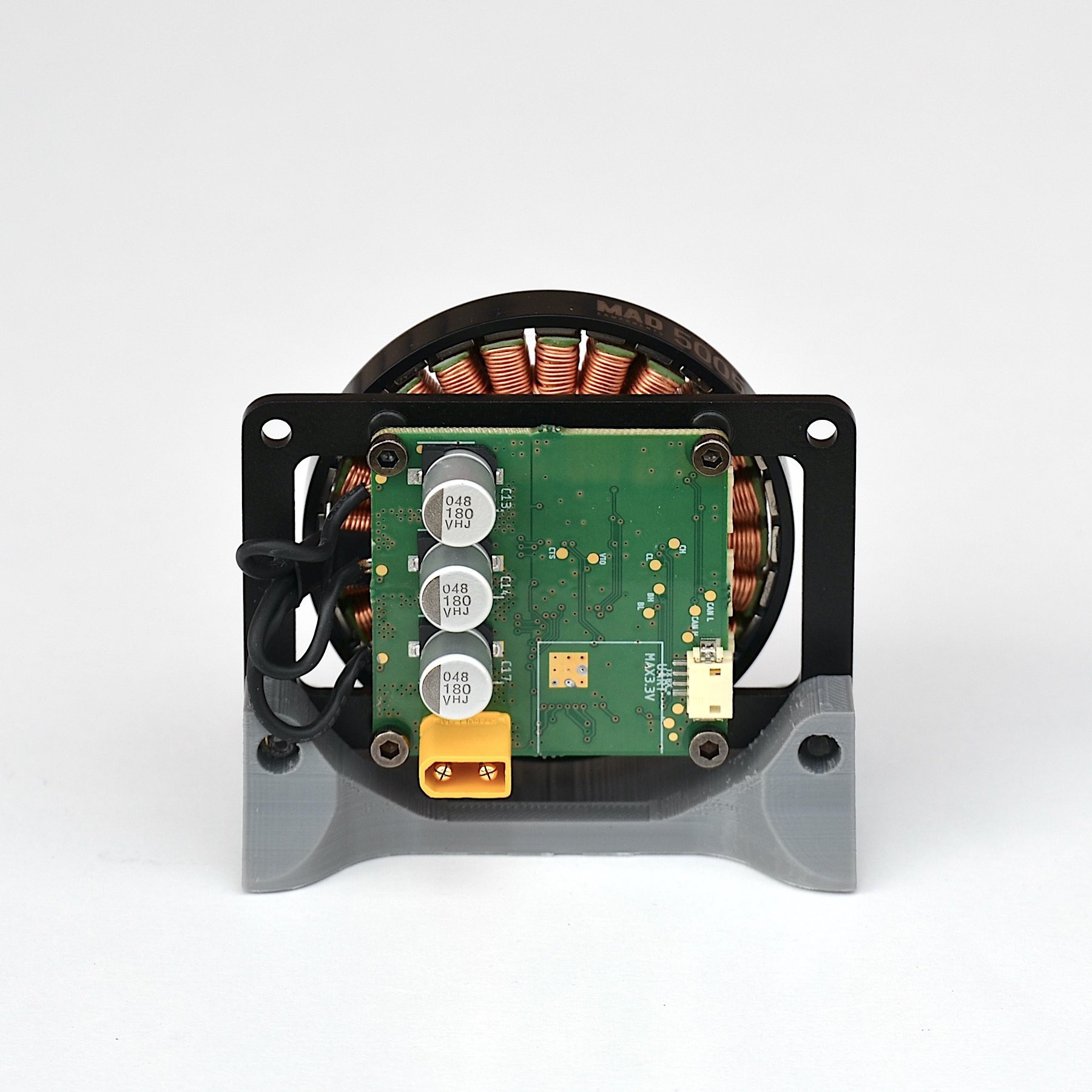
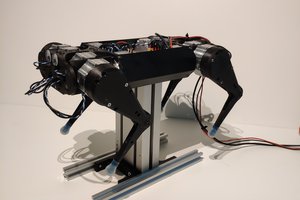
Tinymovr Motor Controller
Affordable, precise, integrated motion control for robotics
 Yannis Chatzikonstantinou
Yannis ChatzikonstantinouBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


















 Piotr Wasilewski
Piotr Wasilewski
 Oskar Weigl
Oskar Weigl
 Yannick (Gigawipf)
Yannick (Gigawipf)
 Josh Pieper
Josh Pieper
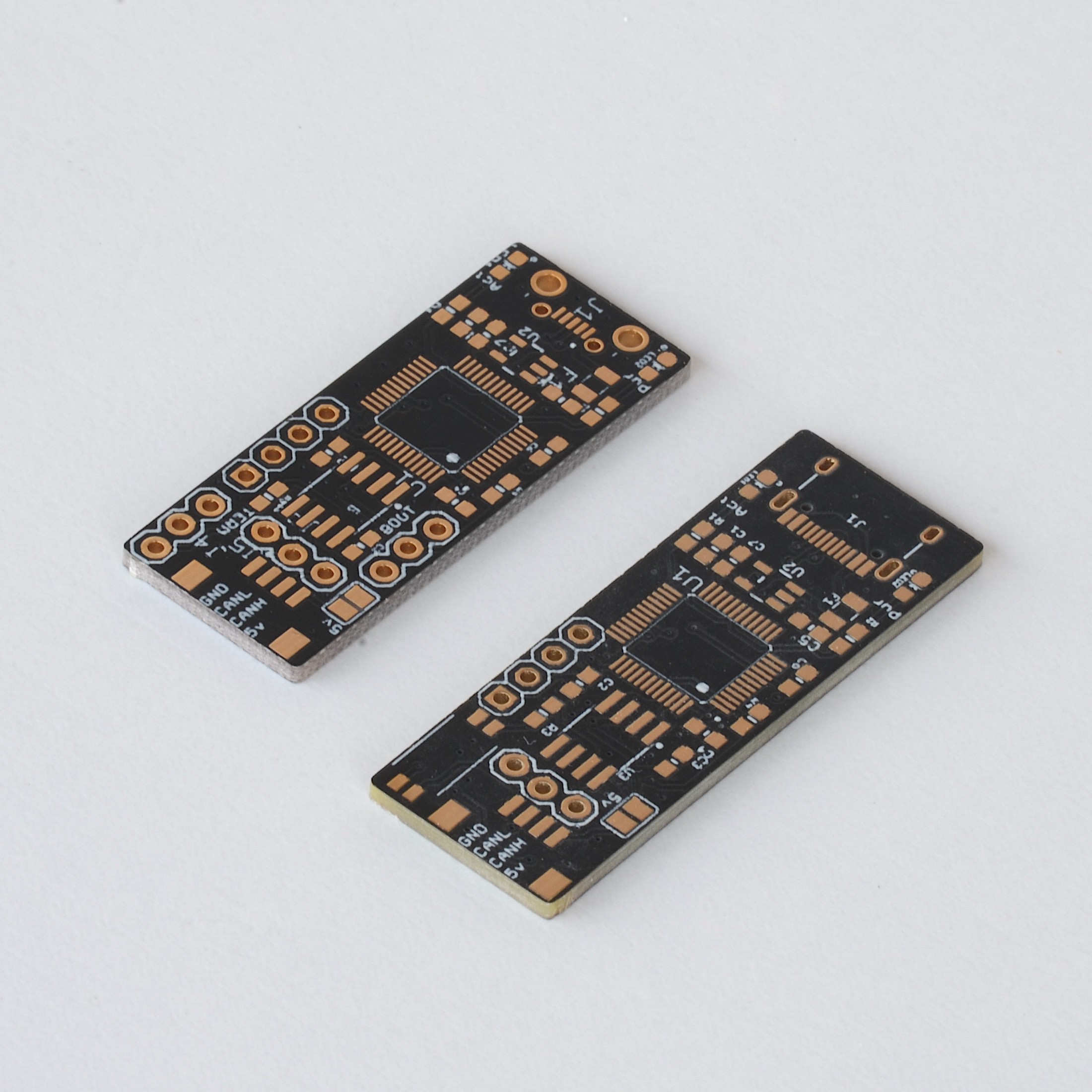
Maybe a stupid question, but why do I see only three MOSFETs instead of six? Very nice looking boards in any case.