New Dexterity
New Dexterity-
Assembly Guide: Hybrid, Motorized Exoskeleton Glove
07/01/2020 at 23:44 • 0 commentsThe motorized exoskeleton glove consists of three different main parts:
- Control Unit
- Robotic Glove
- Smartphone Interface App
![]()
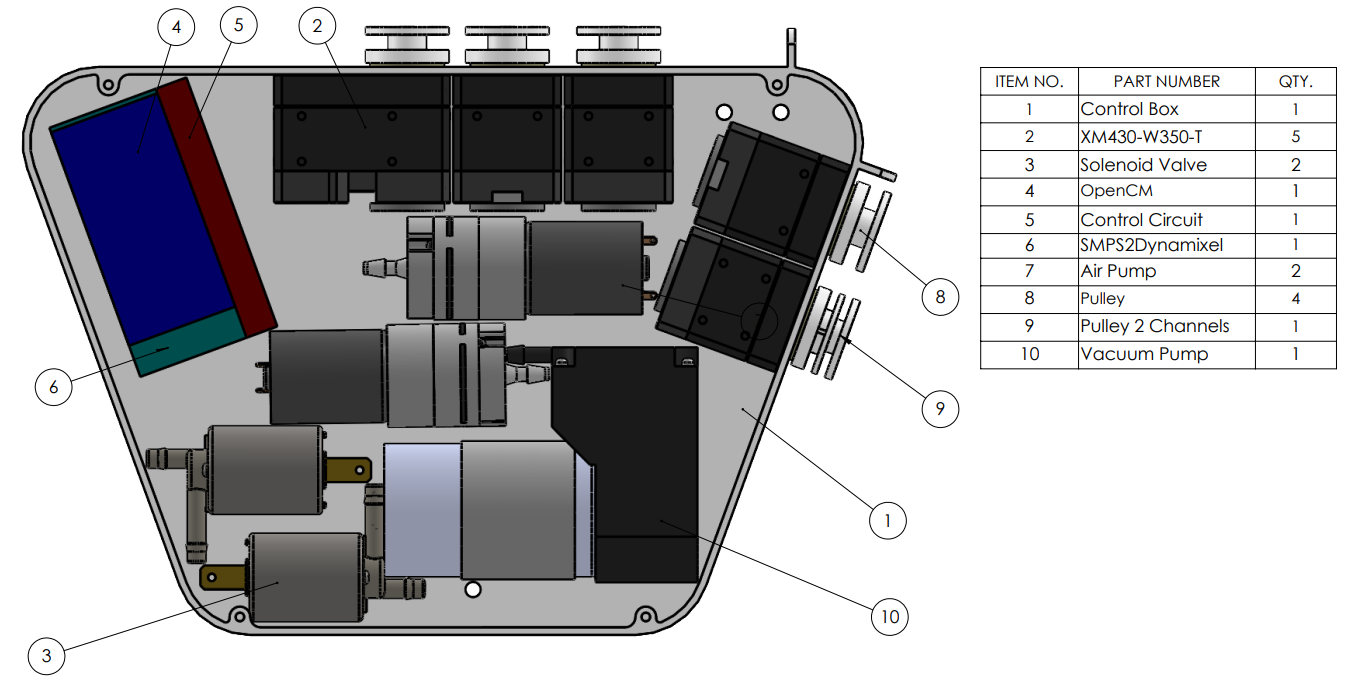
Control Unit Preparation
In order to prepare the control unit you will require the following parts. The 3D printed parts are represented by the white parts. The wiring diagram for the electronics are described in the Build Instructions section of this project.
![]()
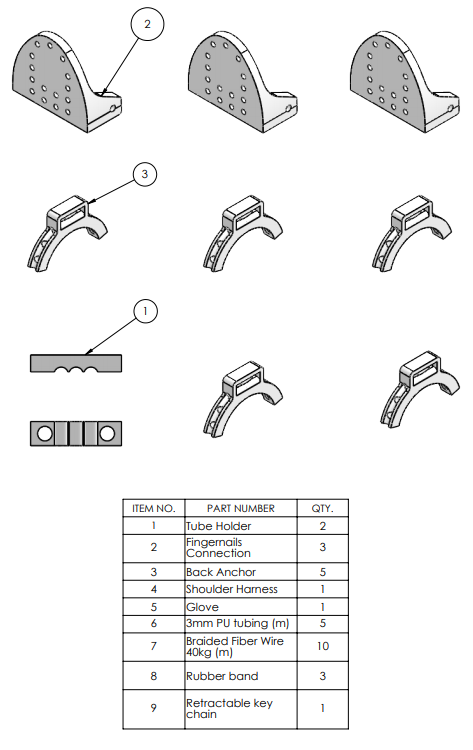
Robotic Glove Preparation
The preparation procedure of the robotic glove is similar to the soft glove of the body-powered exoskeleton glove (video below). The fabrication processes of the abduction chambers and the inflatable extra thumb are described in the Build Instructions section of this project. Once the 3D printed parts are stitched on the glove, the soft parts (abduction chambers, jamming structures and the inflatable extra thumb) can be glued (with superglue) on the glove in the positions showed in the picture below.
![]()
Smartphone Interface App Preparation
In order to control the motorized exoskeleton glove you need to follow the steps below:
- Upload the Arduino code to the OpenCM microcontroller (Available in the GitHub repository).
- Download the Arduino bluetooth controller app.
![]()
- Connect your phone to the Bluetooth module and set up the desired commands according to the Arduino code.
-
Assembly Guide: Body-powered Exoskeleton Glove
07/01/2020 at 23:42 • 0 commentsThe body-powered exoskeleton glove consists of four different main parts:
- The differential module
- The soft glove
- The tendon tensioning and adjustment mechanism
- The harness
In order to build the body-powered exoskeleton glove, the differential module, the soft glove, and the tendon tensioning and adjustment mechanism must be assembled.
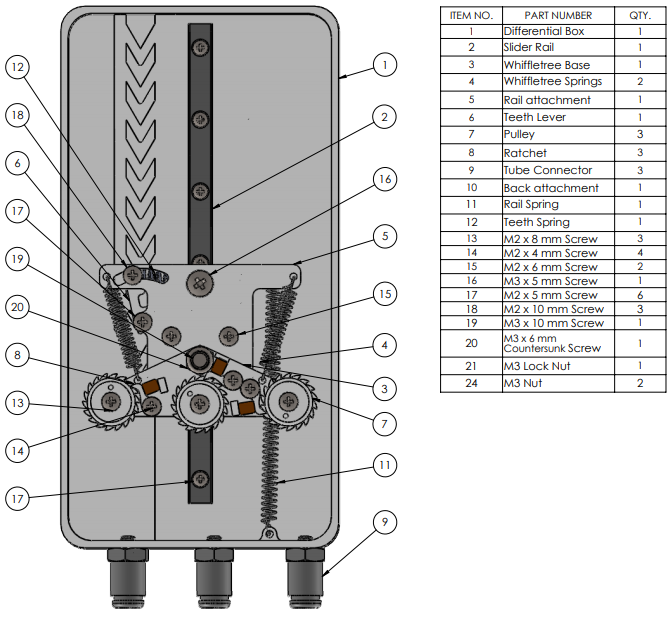
Differential Module Preparation
In order to prepare the differential module you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the differential module.
![]()
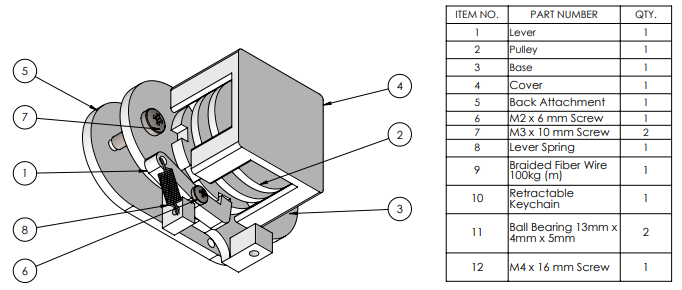
Tendon Tensioning and Adjustment Mechanism Preparation
In order to prepare the tendon tensioning and adjustment mechanism you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the tendon tensioning and adjustment mechanism
![]()
Soft Glove Preparation
In order to prepare the soft glove you will require the following parts. The 3D printed parts are represented by the white parts. The video shows the assembly procedure of the soft glove.
![]()
Device Assembly
The video below shows the assembly and testing procedure of the body-exoskeleton glove.
-
Introduction and Motivation
06/29/2020 at 08:08 • 0 commentsThe human hand is one of the most complex structures of the human body and Nature’s most versatile and dexterous end-effector. Roboticists have always been inspired by the human hand, and they constantly seek new ways of transferring the human skills to robotic platforms, enabling them to execute complex everyday life tasks that require increased dexterity (e.g., grasping and manipulating objects or physically interacting with the environment surrounding them) [1]. According to [2], a small set of representative grasp types accounts for more than 80% of the grasp configurations needed during activities of daily living. The grasps used for such activities include the cylindrical, spherical, tridigital, tip (precision grasp), and lateral grasp [3]. All these grasps can be executed with the thumb, index and middle fingers that are the most important ones, while the ring and pinky fingers appear to have a supplementary role [4]. Such outcomes have been used for the development of simplified robotic devices, that offer lightweight and affordable solutions without compromising their overall efficiency [5].
Several studies have focused on the force exertion capabilities of the human hand demonstrating that a healthy individual can generate a maximum grip force that ranges from 300 N to 450 N [6]–[8]. In particular, in [8] the authors conducted experiments to measure the human hand and finger forces in different situations and obtained a mean value of 54 N for pinch grasp forces and 43 N for distal fingerpad forces exerted on flat surfaces. However, most of the activities of daily living, do not require the high contact and grasp forces that humans are capable of exerting. According to [9], the necessary forces to manipulate objects found on activities of daily living do not exceed 10 - 15 N.
The importance of the role of the hand is quite evident in cases of people that suffer from paralysis or stroke. These patients lose some of the capabilities of their hands (e.g., have weaker grasps) and this loss has a tremendous impact on their lives and in some cases on their independence. Over the last decades, the field of exoskeletons, exosuits and in general assistive devices has witnessed an explosive growth. Many wearable, assistive devices have been designed to increase the capabilities of the human hand and to provide assistance to their users to execute activities of daily living (ADLs) or to regain some of the lost dexterity [10], [11]. These wearable devices can be actuated in different ways (e.g., through cables, linkages, hydraulic systems, and inflatable structures) and can have different stiffness, from completely soft to totally rigid.
In [12], the authors propose a rigid hand exoskeleton that weighs 1.1 kg and can exert a continuous force of 5 N through linkages and motors connected to the hand. In [5], a tendon driven soft robotic exo-glove is proposed, that can generate a pinch force of 20 N and a wrap grasp force of 40 N using a battery powered actuation unit that weighs more than 1.5 kg. In [13], the authors present a tendon-driven robotic glove that can apply a maximum grip force of 15 N using a backpack weighing approximately 6 kg. In [14], the authors propose the SEM Glove, a tendon-based assistive glove that can exert up to 4 N in the fingertips using a battery which lasts approximately one day and costs more than 4,000 USD. In [15], the authors present the SSRG glove, a robotic glove used in space suits that employs linear actuators that pull synthetic tendons to increase the grip strength by more than 60 N. In [16], the authors propose an exo-glove that achieves an increase of about 8 N of the distal tip force using a belt pack with a battery and a hydraulic system that weighs 3.3 kg and can run for two hours. In [17], a soft robotic glove is proposed using a pneumatic system to actuate it. This systems weighs 1.26 kg and can exert a maximum fingertip force of 9.12 N.
Although the aforementioned assistive devices can offer a substantial improvement in the quality of life of people with physical disabilities, they have several limitations. First, these devices rely on external power sources to operate, and as a consequence, their autonomy is limited. In addition, the cost of assistive devices increases considerably when pneumatic systems, multiple motors, and sophisticated sensors are used. The addition of these components also increases the total weight of the device, making it also uncomfortable for the user. Last but not least, most of the current wearable solutions do not offer a long operation time so they cannot be used for long periods of time. Thus, a lightweight, affordable, easy to operate assistive device with long autonomy would be indispensable for people that suffer from paralysis or for human augmentation purposes.
In this project, we propose two compact, wearable, and lightweight assistive exo-gloves for grasping capabilities enhancement. The first device uses a body-powered mechanism and the second device is a hybrid exoskeleton glove equipped with variable stiffness joints, abduction / adduction capabilities, and an extra thumb. The devices are experimentally tested and their efficiency is validated using three different types of tests: i) grasping tests that involve different everyday objects, ii) force exertion capability tests that assess the fingertip forces that can be exerted while using the exo-gloves, and iii) motion tracking analysis of the bending profile of the fingers.
References
[1] C. C. Kemp, A. Edsinger, and E. Torres-Jara, “Challenges for robot manipulation in human environments [grand challenges of robotics],” IEEE Robotics & Automation Magazine, vol. 14, no. 1, pp. 20–29, 2007.
[2] C. Sollerman and A. Ejeskar, “Sollerman hand function test: a standardised method and its use in tetraplegic patients,” Scandinavian Journal of Plastic and Reconstructive Surgery and Hand Surgery, vol. 29, no. 2, pp. 167–176, 1995.
[3] M. C. Carrozza, G. Cappiello, S. Micera, B. B. Edin, L. Beccai, and C. Cipriani, “Design of a cybernetic hand for perception and action,” Biological cybernetics, vol. 95, no. 6, p. 629, 2006.
[4] M. V. Liarokapis, P. K. Artemiadis, and K. J. Kyriakopoulos, “Quantifying anthropomorphism of robot hands,” in IEEE International Conference on Robotics and Automation (ICRA), 2013, pp. 2041–2046.
[5] B. B. Kang, H. Lee, H. In, U. Jeong, J. Chung, and K.-J. Cho, “Development of a polymer-based tendon-driven wearable robotic hand,” in IEEE International Conference on Robotics and Automation (ICRA),
2016, pp. 3750–3755.[6] V. Mathiowetz, N. Kashman, G. Volland, K. Weber, M. Dowe, S. Rogers et al., “Grip and pinch strength: normative data for adults,” Arch Phys Med Rehabil, vol. 66, no. 2, pp. 69–74, 1985.
[7] I. N. Gaiser, C. Pylatiuk, S. Schulz, A. Kargov, R. Oberle, and T. Werner, “The fluidhand iii: A multifunctional prosthetic hand,” JPO: Journal of Prosthetics and Orthotics, vol. 21, no. 2, pp. 91–96, 2009.
[8] A. D. Astin, “Finger force capability: measurement and prediction using anthropometric and myoelectric measures,” 1999.
[9] P. Polygerinos, K. C. Galloway, E. Savage, M. Herman, K. O’Donnell, and C. J. Walsh, “Soft robotic glove for hand rehabilitation and task specific training,” in IEEE International Conference on Robotics and
Automation (ICRA), 2015, pp. 2913–2919.[10] C.-Y. Chu and R. M. Patterson, “Soft robotic devices for hand rehabilitation and assistance: a narrative review,” Journal of NeuroEngineering and Rehabilitation, vol. 15, no. 1, p. 9, 2018.
[11] P. Maciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy, and S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” Journal of neuroengineering and rehabilitation, vol. 11, no. 1,
p. 3, 2014.[12] M. Fontana, A. Dettori, F. Salsedo, and M. Bergamasco, “Mechanical design of a novel hand exoskeleton for accurate force displaying,” in IEEE International Conference on Robotics and Automation (ICRA), 2009, pp. 1704–1709.
[13] M. A. Delph, S. A. Fischer, P. W. Gauthier, C. H. M. Luna, E. A. Clancy, and G. S. Fischer, “A soft robotic exomusculature glove with integrated sEMG sensing for hand rehabilitation,” in IEEE International Conference on Rehabilitation Robotics (ICORR), 2013, pp. 1–7.
[14] M. Nilsson, J. Ingvast, J. Wikander, and H. von Holst, “The soft extra muscle system for improving the grasping capability in neurological rehabilitation,” in IEEE EMBS Conference on Biomedical Engineering
and Sciences (IECBES), 2012, pp. 412–417.[15] J. Rogers, B. Peters, E. Laske, and E. McBryan, “Development and testing of robotically assisted extravehicular activity gloves.” 47th International Conference on Environmental Systems, 2017.
[16] P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, and C. J. Walsh, “Soft robotic glove for combined assistance and at-home rehabilitation,” Robotics and Autonomous Systems, vol. 73, pp. 135–143, 2015.
[17] H. K. Yap, J. H. Lim, F. Nasrallah, and C.-H. Yeow, “Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors,” Frontiers in neuroscience, vol. 11, p. 547,
2017.
Wearable, Soft Robotic Exoskeleton Gloves
The New Dexterity / Open Bionics wearable, affordable, soft exogloves are bionic devices for rehabilitation and human augmentation.