-
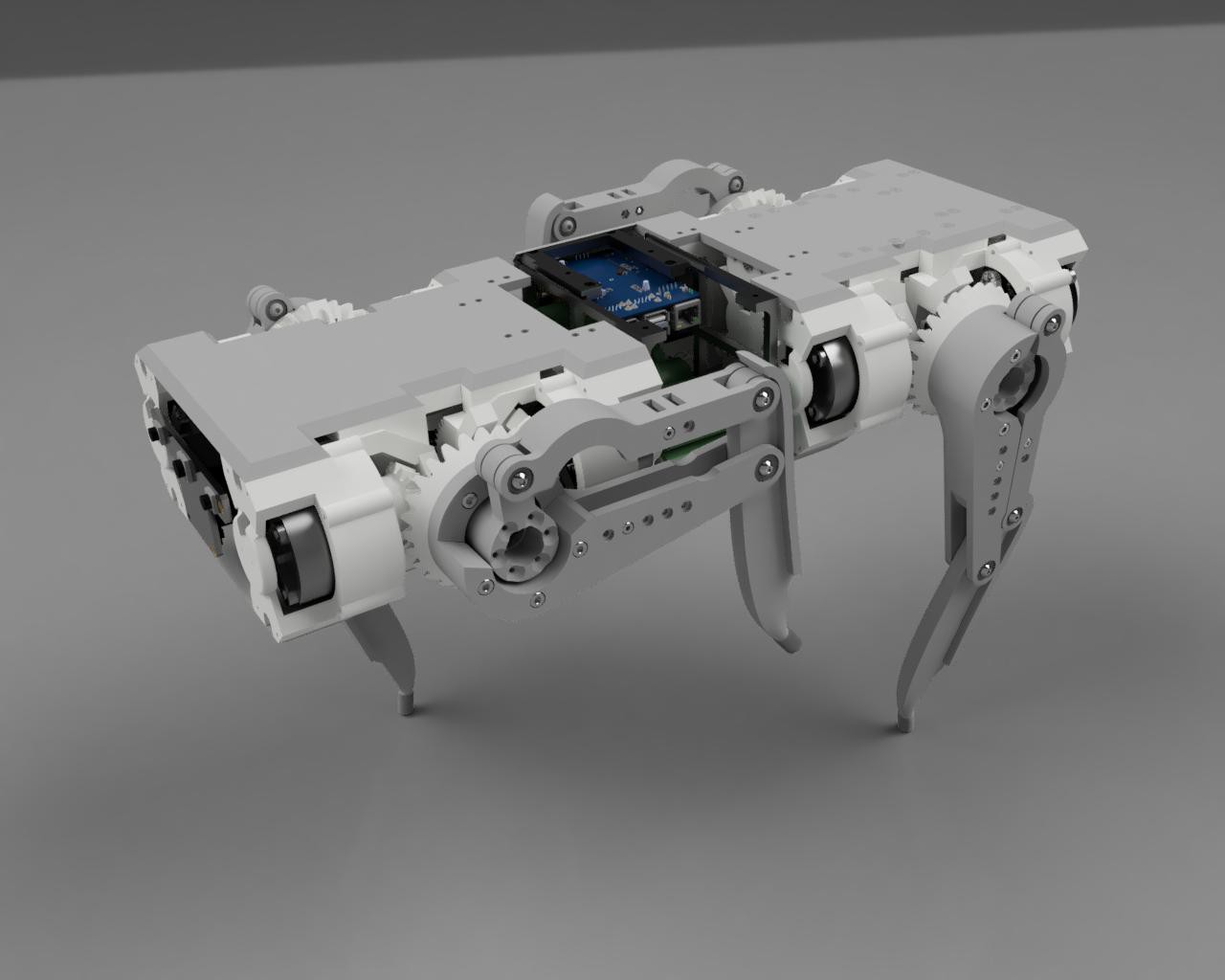
Whole body design, new legs, electronics, power.
01/19/2021 at 21:45 • 1 comment![]()
Progress update on the project.
The design of the whole robot is close to being finished. There are new legs compared to the initial plan. The old ones were not stiff enough, so I'm trying a parallel links approach. However, I still need to test these - I'm waiting for new bearings to do that
I also managed to squeeze in Odroid C4 and 8x26650 A123 LiFePO4 cells together with BMS. These particular cells and BMS will provide ca 25v, 60 amps of power.
At the very front you can see OAK-D, which I'm expecting to get in a week or two. It's kind of hanging there, cause I couldn't find CAD model of a metal case that it ships with, so I will have to measure it once I have it in my hands.
Let me know how you like it.
-
Working controls
12/28/2020 at 21:33 • 0 commentsA big day for the project - I have finally managed to sort out control algorithms and I can now steer all 3 axes of the leg with a gamepad.
You can also see a preliminary calibration procedure in the beginning of the video.
Quadbot - 12 DoF walking robot
Quadbot is a quadruped walking robot with 3 DoF per leg. Offers great flexibility thanks to 12 brushless motors.