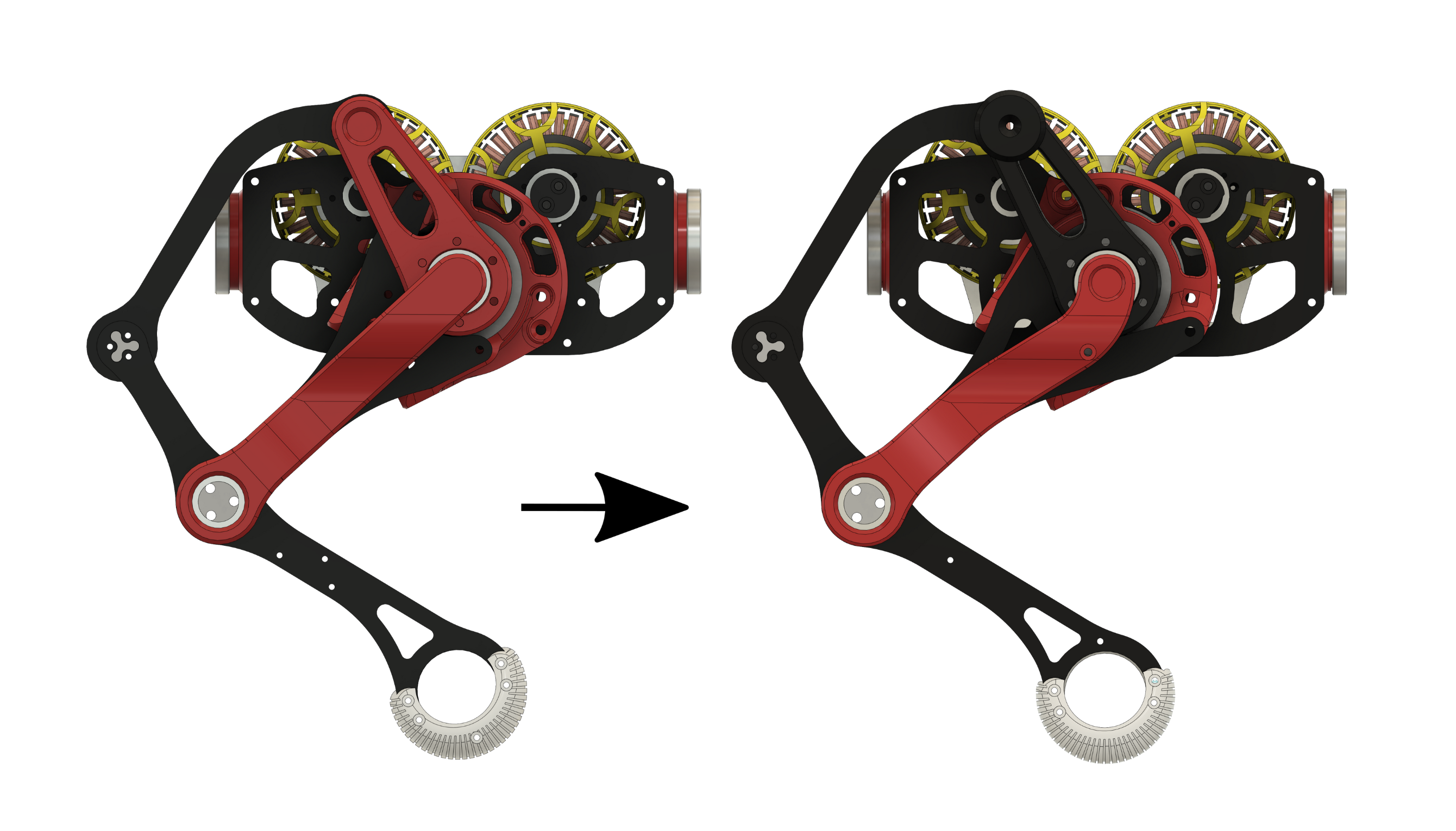
We made multiple changes which aimed to improve the assembly experience when building Stanley. The most substantial one was the decision to flip (mirror) the Cable mechanism of the hip.
This change brought a few key benefits:
The Femur Scaffolding (grey part along the femur) was straight on the old design and has a bend in the new design. It is now mounted with fewer, but better-placed screws, which means it provides better support and a small mass saving.
There is significantly better access to hip mechanism cable tensioning.
The assembly process of the hip cable mechanism is less fiddly.
Other changes include:
Reducing the number of screws per leg: 12 fewer screws per leg needed!
Rotating the floor a bit more downwards so it is facing the ground at a more universal angle
Improving access to cable tensioning nuts
Making the entire leg assembly 6 mm shorter (eliminating some dead space in the ABAD mechanism)
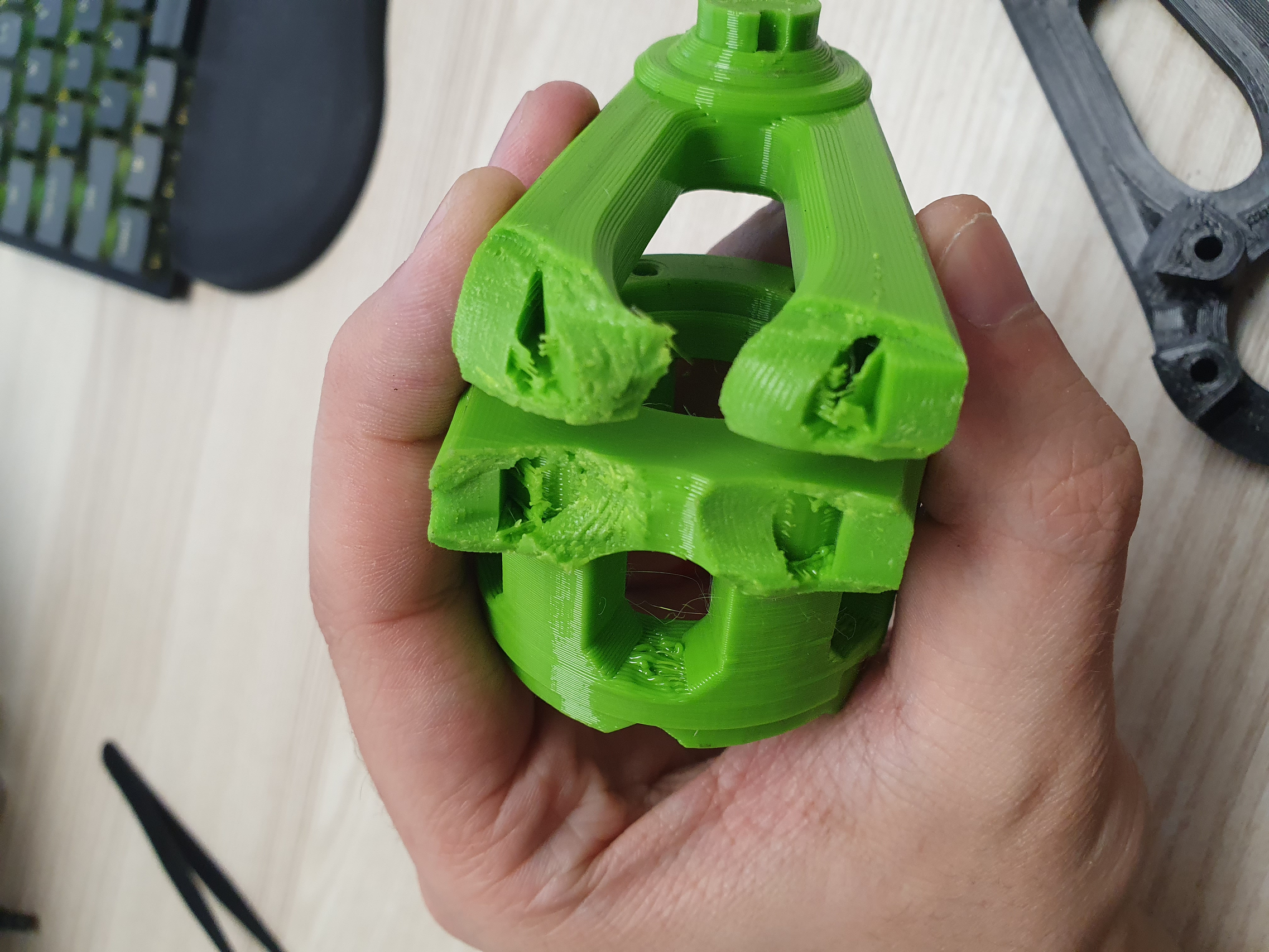
In our testing so far, we found that the Crank (see image below) is the part of Stanley’s leg that is the easiest to break.
When the robot falls on its side, strong impacts on the tip of the crank are likely to occur, which causes it to snap.
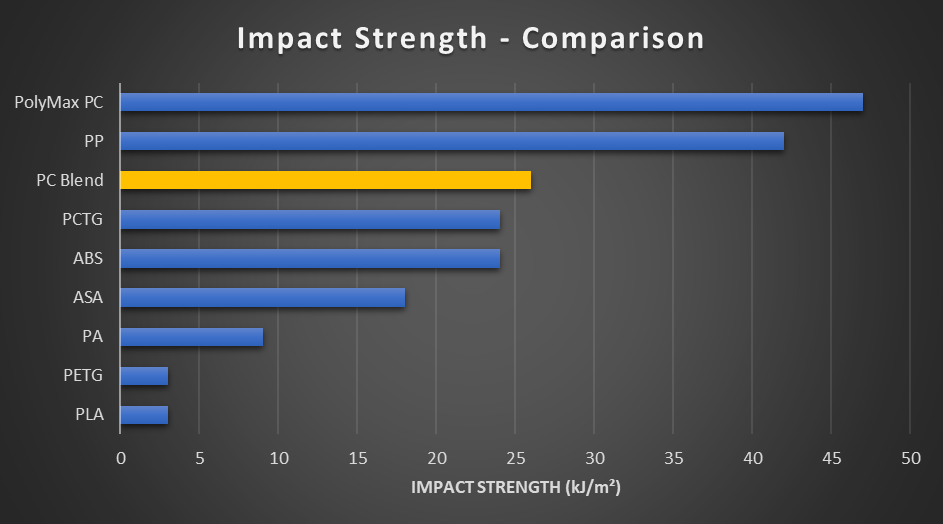
As seen in the picture above the snap occurs across layer lines, so layer adhesion does not play a role here. We took two preventive measures against this. First - we switched the material we use from PET-G to Polycarbonate.
Not only does Polycarbonate have a 40% higher tensile strength than PET-G, but its impact strength is an order of magnitude better, which makes it a perfect material for this demanding part.
The second improvement was the introduction of a TPU (Fiberlogy MatteFlex) bumper - to soften the impacts and prevent scratching. So far we haven’t seen this setup break, but we keep testing, and keep improving!
So far we had been using Fiberlogy Fiberflex 30D to print Stanley’s feet in two parts.
Although we like this filament a lot, there are inherent limitations to how soft and sticky a 3D printing filament can be.
These limitations are caused by the construction of FDM extruders. Even an extruder that is well optimised for flexibles, like the E3D Hermera - still needs to grab onto the filament, push it through a metal tube and fight the backpressure created by the small nozzle hole on the other side.
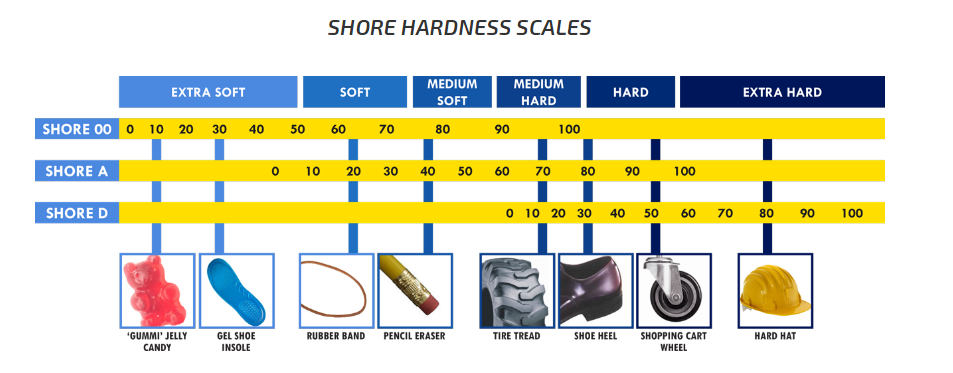
This means that the softer this filament is, the easier it will be for it to buckle and press against the wall of the tube, and the higher its coefficient of friction the more resistance this pressure will cause. That is why the softest filaments on the market are in the Shore 75~85A (20~30D) range.
This limitation does not apply to castable silicone rubbers. These come in hardness levels all across the Shore hardness scale. We made an educated guess and picked a silicone rubber at the Shore Hardness of 25A for Stanley’s feet.
The silicone rubber is so soft that it needed scaffolding in order not to move around too much. We designed a scaffolding that includes two ridges that prevent the rubber from sliding along the scaffolding during forwards acceleration.
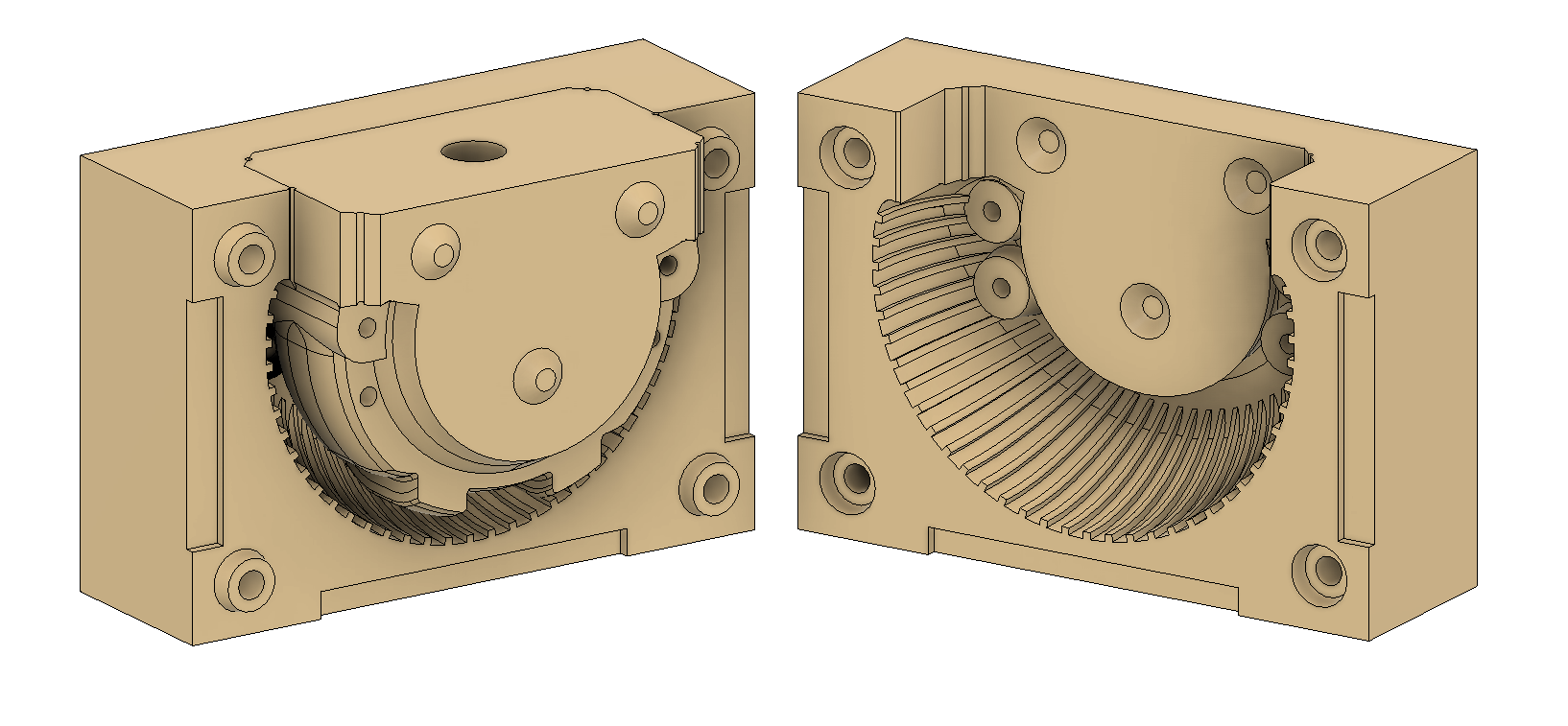
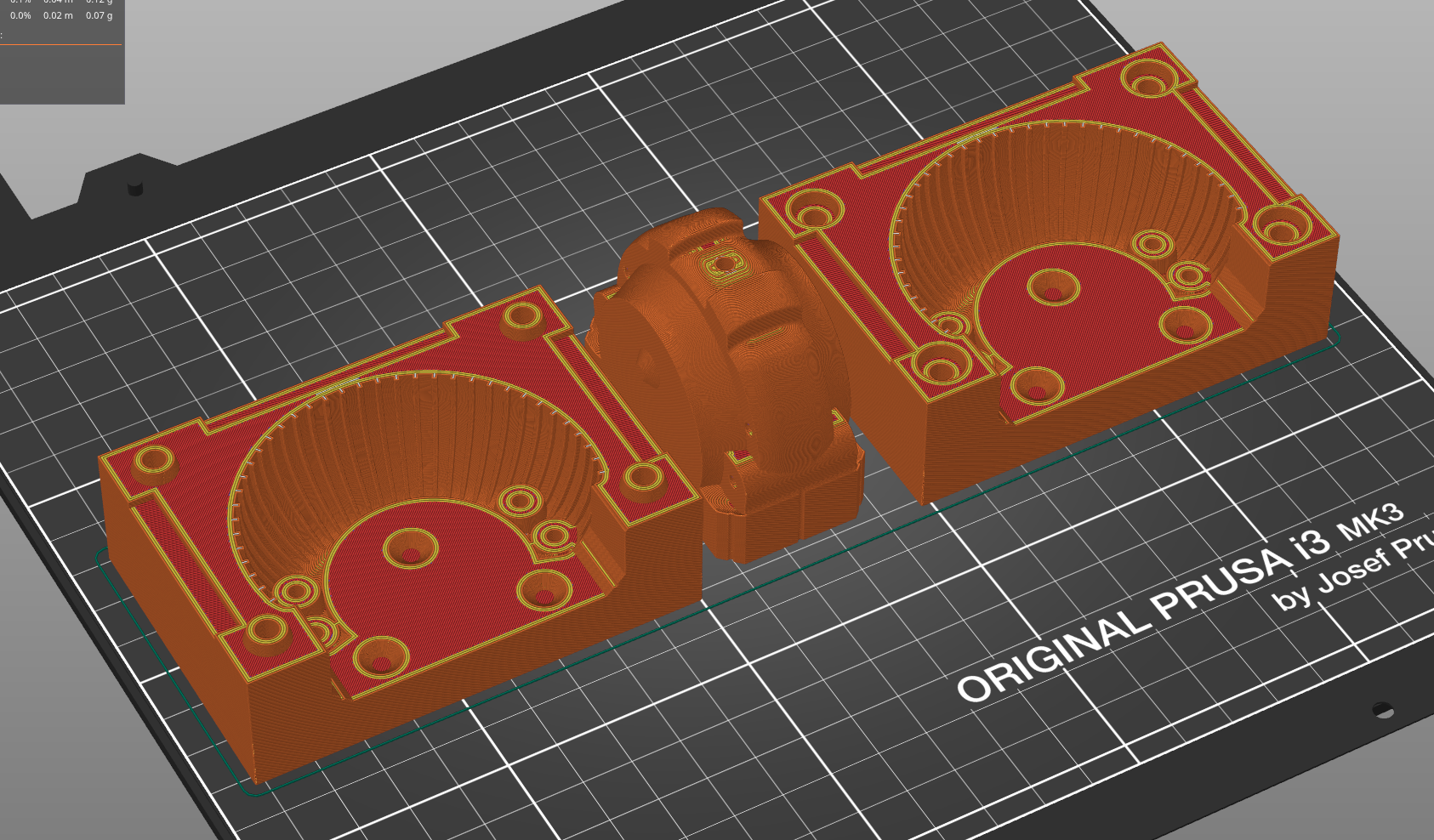
Now when this was ready we needed a mold! We designed it in 3 parts:
That print like this:
We use 4x M4 screws to assemble the mold and we also push 4x steel rods into it, which act as the negative for screw holes in the feet.
We use a big syringe to inject the silicone into the mold through the top hole. The 3 conical features on the central part of the mold act as locating features, improving assembly precision. The cones around M4 screw holes serve the same purpose. The recessed tabs around the edges make opening the mold easier.
Have a look at the very satisfying process of demolding Stanley's rubber feet in this short video:
The Small drums of Stanley’s Capstan mechanisms are experiencing the highest loads out of all the printed parts on the robot.
That places some high demands on the filament we print them with. We started with just basic PET-G which failed a few times with the earliest designs.
With geometry improvements, we were able to get it to a state where it was no longer failing, but we felt that the safety margin was not high enough.
We first tested Nylon, Nylon blended with Carbon Fiber and Nylon Blended with Glass Fiber ...
Although they did not break along layer lines as PET-G did, they showed definite signs of wear. The grooves were getting worn in, and the Nylons with additives behaved a bit like a sponge that is getting pressed in.
Then we came across the Prusa PC Blend, which turned out to be ideal for our application. It is strong both across and along layer lines. It is stiffer than Nylon, but not so stiff that it would shatter easily like PLA.
It is decently easy to print and with Magigoo for Polycarbonate it prints really reliably. Since we started using PC Blend for our small drums we haven't seen any one of them break nor show any significant signs of wear. Here’s an image of the PC Blend print:
The RBC Innovators ball is a celebration in support of sparking curiosity and delivering innovative and accessible science experiences at the Ontario Science Centre.
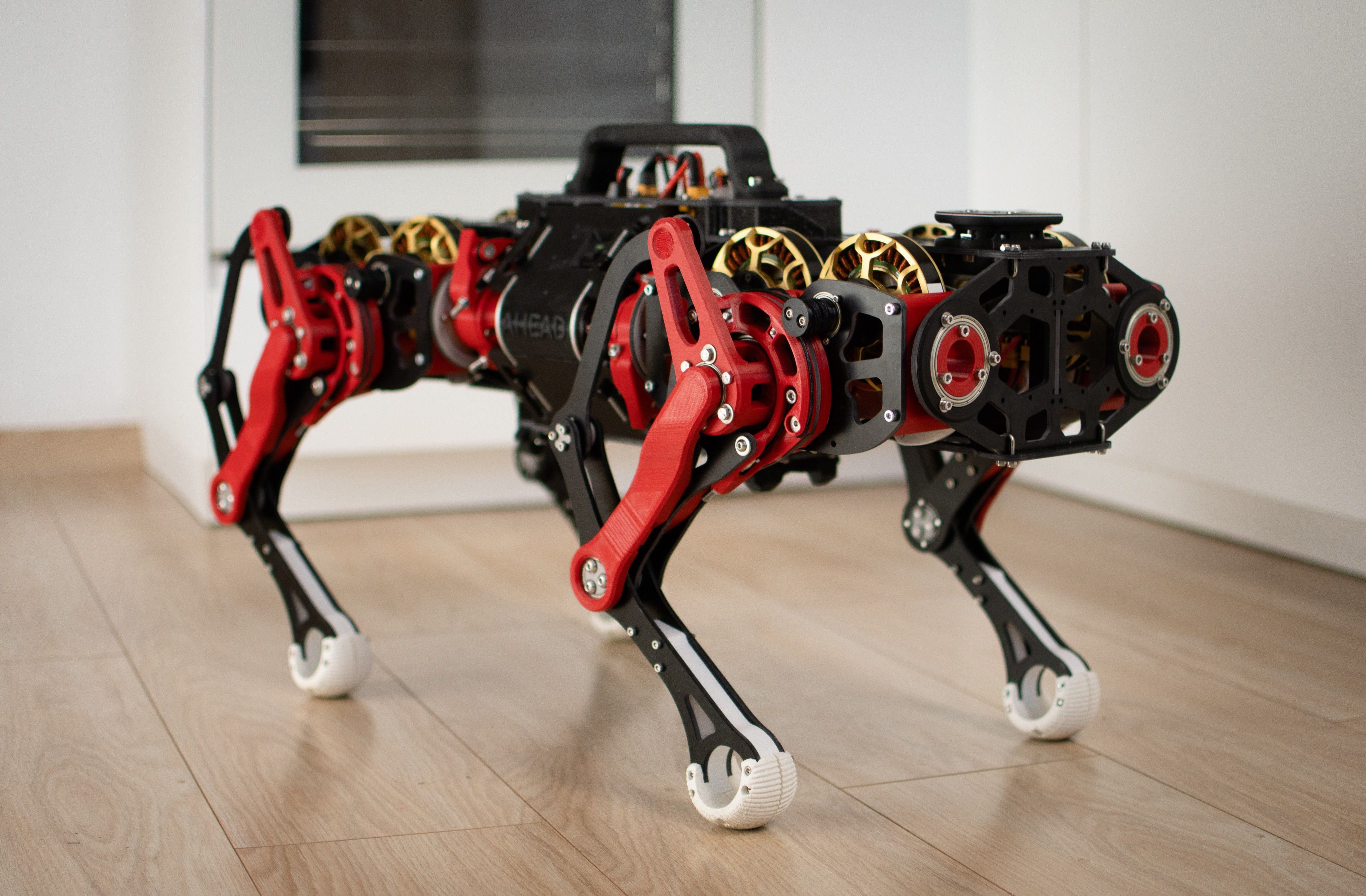
We were inspired by this mission statement and decided to donate the second Stanley prototype we made to the Science Center for their fundraising event. Our goal was to inspire young generations to dive into robotics and have a better understanding of how quadrupeds work. We were really lucky to be present in Toronto for the event and to introduce Stanley to Dan Riskin! You can watch a replay of the event on Youtube (Stanley makes a come back at 45’19” and 1:00’00”)
This specific Stanley prototype was modified especially for the event with some special touches like the signature colour red and a maple leaf design on the front puck.
For the handle on Stanley, we started with just plain PET-G, but we soon realized that it would break every time Stanley fell over and landed upside down. After that, we printed the handle with FiberFlex 30D rubber which turned out to be too much of a “wet noodle”.
And then Fiberlogy released the MatteFlex 40D! We ordered a spool as soon as we it became available and we’ve been extremely happy with the results right away!
After extensive “on stand” testing and the first few days of having fun with fully assembled Stanley, we felt pretty confident about the stainless steel cables. But we were wrong.
Within a few days - after we Started implementing jumping - Stainless Steel Cables started breaking one after another.
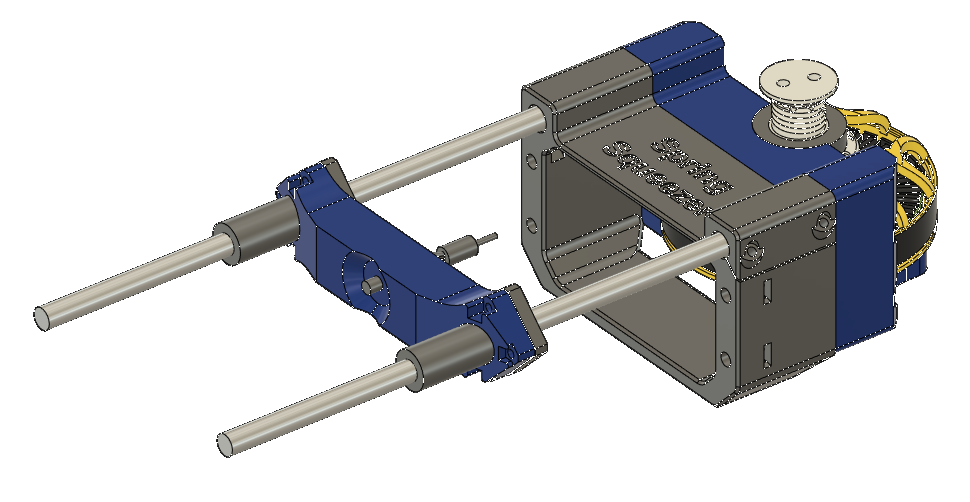
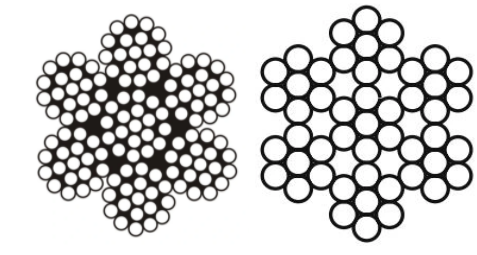
We did tests with thicker cables and different cable constructions. We even built our own machine for testing Cables - the SpringSqueezer (link to the Github repo) :
We hoped that a thicker cable or one with more and thinner strands would solve the issue:
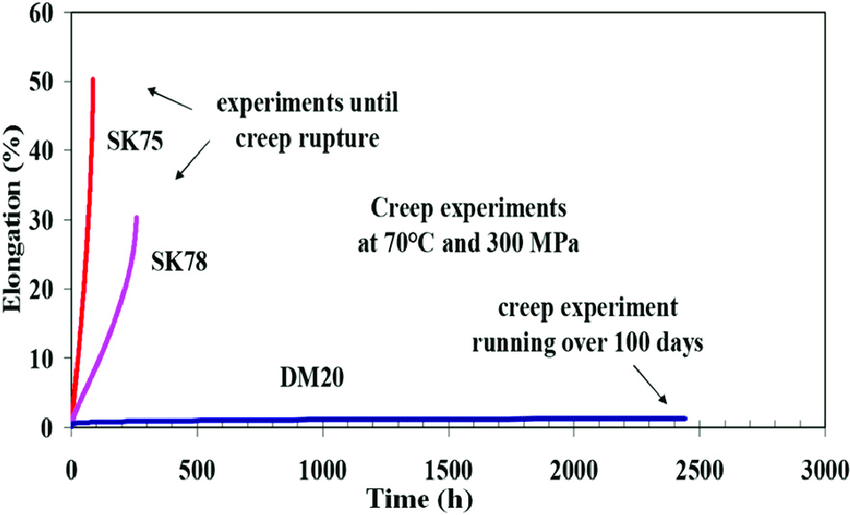
But this wasn’t enough. We needed to move to a synthetic cable. After doing the research we decided to go with Dynamica DM20 - a strong synthetic fibre with very low creep.
Now all Stanleys we build have a custom DM20 rope in their capstan mechanisms.
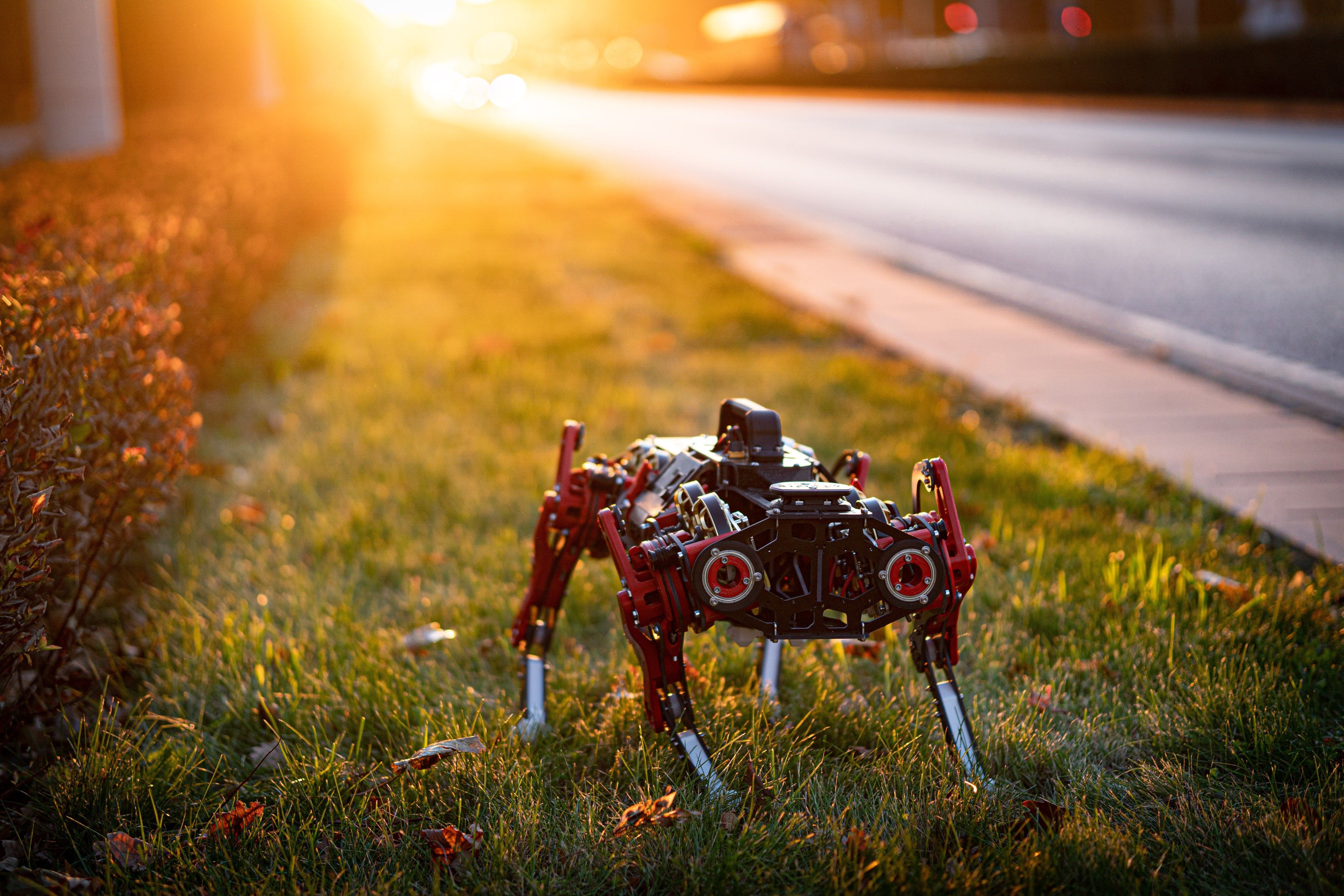
In this second “catching up post” we show you some better walking! This time battery-powered, untethered, with much softer PD settings
We took Stanley to a rooftop terrace to experiment on some less even terrain. At this point we are running a controller that does not make use of the ground reaction forces.
Stanley’s mechanical cable-driven quasi direct drive actuators allow for great high-acceleration and high-frequency performance. We’re showcasing it here with a “spin in place” motion. Stanley is able to do a full 360deg rotation per second - 60RPM!
Hi! We are getting back to posting about Stanley here. We’ll start by getting up to speed with some milestones we achieved a while back and we’ll get to present ones very soon so stay tuned!
First, take a look at Stanley Standing up for the first time and having a good stretch here:
You can see here the wide range of motion Stanley is capable of. Achieving that was the next step after solving inverse kinematics for a single leg. Body kinematics is a layer on top of leg kinematics that calculates the Cartesian position of each leg tip needed to achieve the commanded position of Stanley’s body. That leg tip position is then fed into the algorithm for leg inverse kinematics and that’s how we get positions for each of the 12 motors.
After that it came time for Stanley's first steps:
The walk here is still pretty clumsy - slow and jittery. Stanley is walking tethered and the lab PSU is a limiting factor (although the PSU could easily handle average power consumption, the high momentary peaks were overwhelming it). PD parameters at the time were way too stiff (P was too high) and that is what made the robot so bouncy.
 Ahead
Ahead