-
arduino code is loaded and includes a hybrid filter for low noise fast response
01/19/2021 at 11:53 • 0 commentsincluded files for filter_Sensor. includes example vl53l0x and my own noisefilterbox.h that has a function that reduces noise. this is from actual data from a lidar sensor VL53L0x with noise +/- 0.5mm at 30-50 samples a second. no tweaking the registers of the device yet.
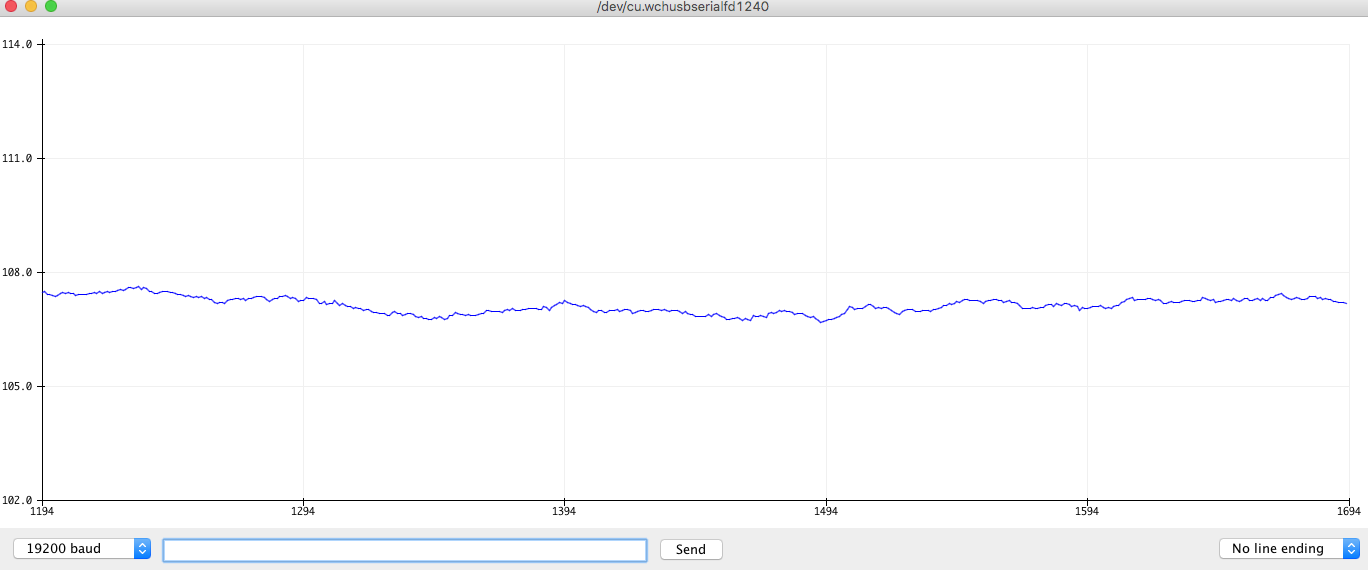
this is using filter in Filtermode==3 and has an stable time of down to 4 seconds for a change of 150mm

here is same device at a different time without any filtering
this filter adjusts quickly to change.
-
measure of an analog environment with noise and filtering.
01/18/2021 at 23:40 • 0 commentsfor the arduino code, there is a noisefilterbox.h file, that has a function called
filterNoiseReductionBox(float AnalogfloatSignalInput,int FilterMode, bool isItStable) it does a few things
AnalogfloatSignalInput is the signal to input into it.
FilterMode can be 0,1,2,3
FilterMode==0 is no filter so you can see default noise.
FilterMode==1 is 10x filter. it is still somewhat fast, but you can see ripples.
FilterMode==2 is 100x filter. it is very slow to respond, but noise free.
FilterMode==3 this is hybrid mode filter, it is quite fast and noise free.
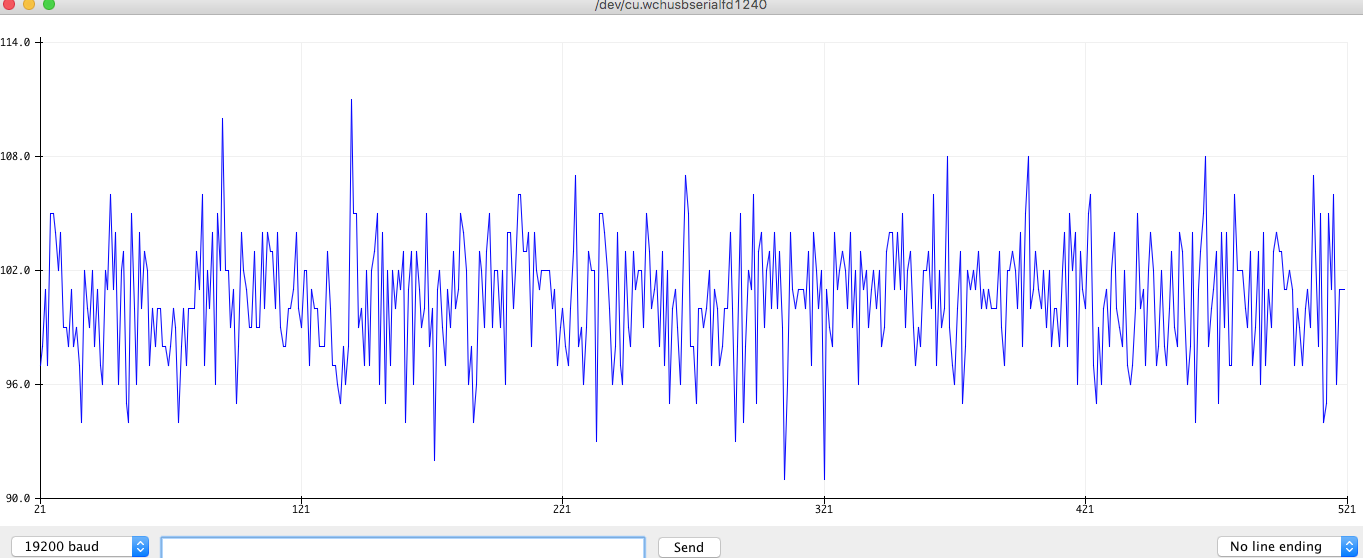
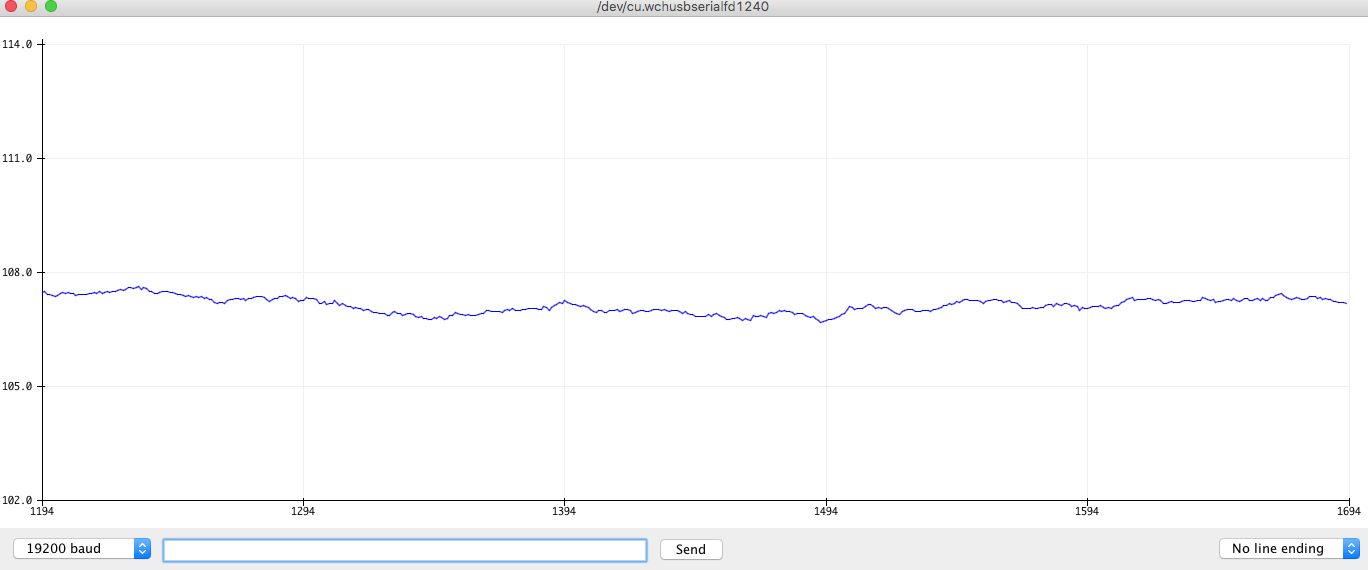
here is an actual VL53L0x sensor with a case enclosure for sensor and sampling about 30 to 50 times a second. the plotter of Arduino outputs the data. i used a baud of 19200. you can see the noise is +/-6mm
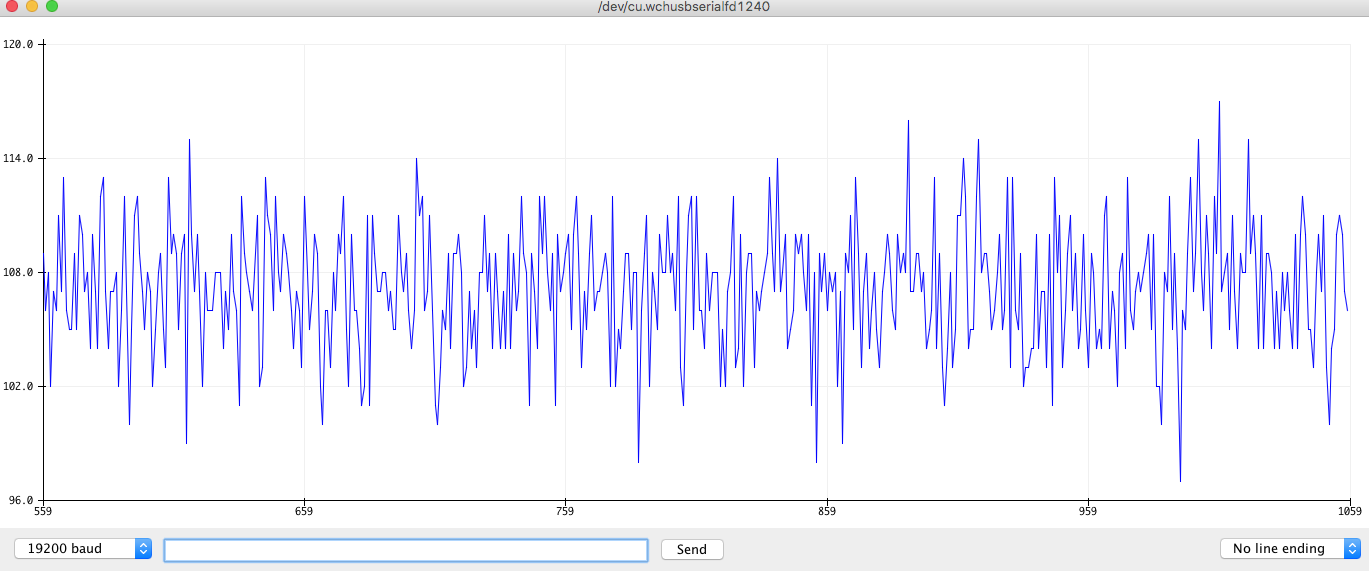
here is what it looks like using FilterMode==1 a 10x sample filter
signal is still noisy but it is now a smaller scale, it is +/- 2
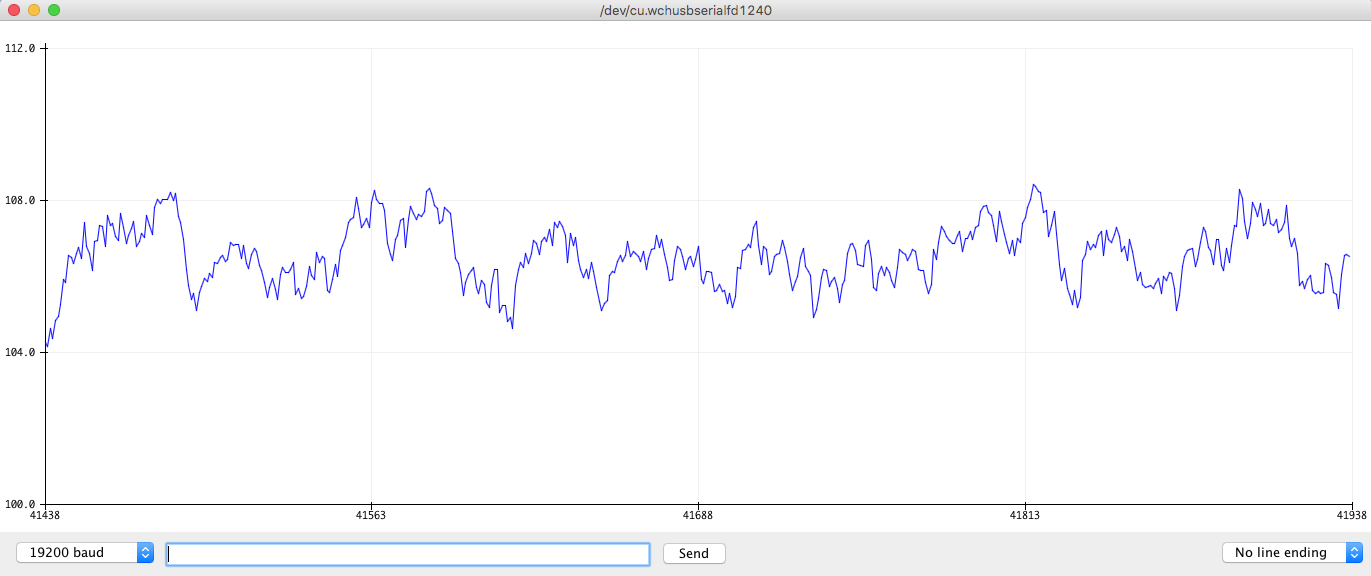
here is FilterMode==2
with 100x filtering noise is reduced to +/- 0.5mm but the slew rate, or rate of change is really slow. with 30-50 samples a second, it takes at least 1300 samples to become stable so between 26 to 43 seconds per
measurement.
-
how to get useful information out of filtered data and noise reduction
01/18/2021 at 06:41 • 1 commentwhen using the lowpassfilter.py code you can see from the pulsed data, and increase in frequency that there is a limit to how good of filtering we can do and get a quick enough response for data to be useful.
here is a second set of python code called bandpassfilterwdetectionofstability.py that can detect when a signal is stable and not changing more than a set percentage. from this data graph it can be seen that when a lot of filtering is done, even though there is no noise, it takes a long long time for sample to stabilize, and in the 100x filtering the signal rarely stabilizes within the times allowed for in simulation.
dsp arduino code for filtering analog enviroments
get guaranteed accuracy from a sensor in a noisy environment quickly and consistently from hybrid filtering bandpass example for VL53L0