 Mykolas Juraitis
Mykolas JuraitisMotivation
There can't be too many ways to control robots. Sometimes hands are too busy, so voice control helps. Sometimes hand gestures are faster and more appropriate. Sometimes remote control device battery dies and you wish you have implemented one more way for an emergency stop. Tap codes are very simple way to convey information. They are way easier to remember than Morse code and might be yet another robot control method for expected or an emergency situation.
Implementation
Although originally tap codes were invented to convey data by tapping, i.e. by sound there are a lot of ways to use the same codes. It is possible to send pulses or light, change color, vibrate, etc. Possibilities are endless - you only have to detect any kind of changes repeating in given sensor data stream.
Prototype using accelerometer data
Data
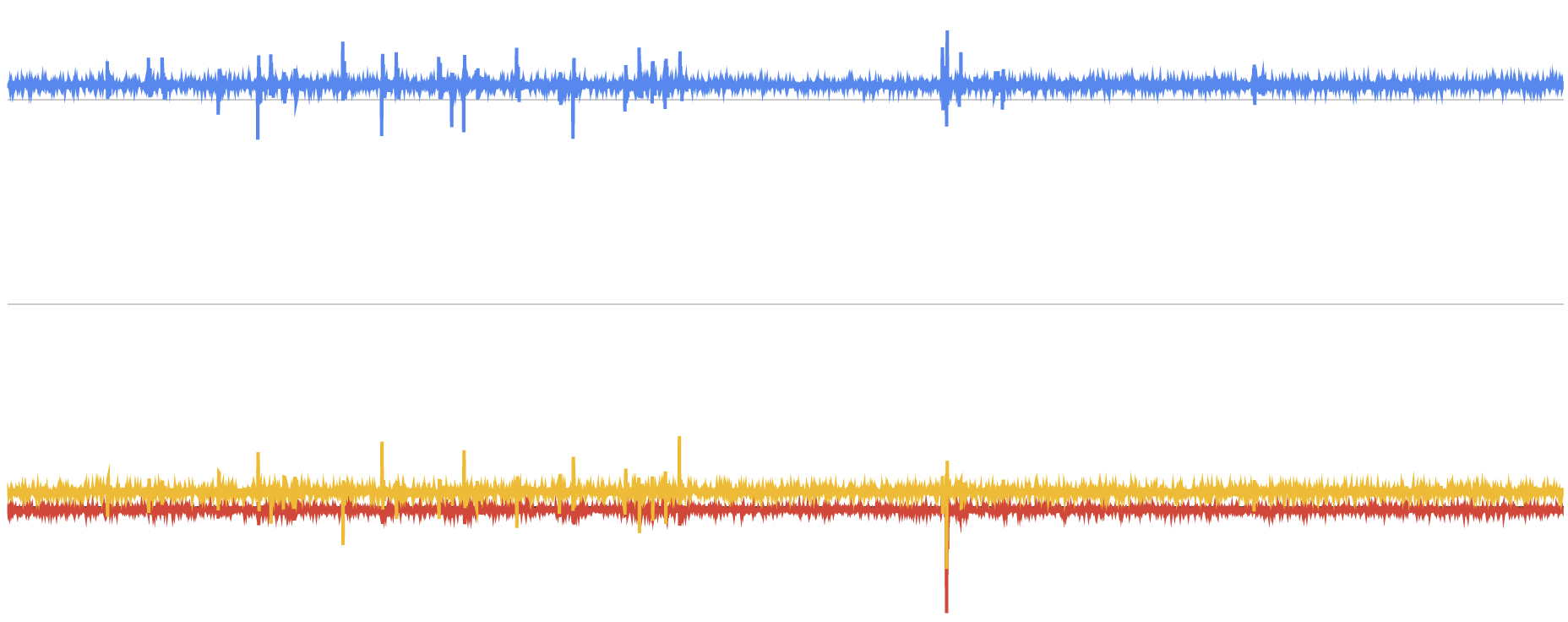
When robot is stationary taps are clearly visible as short duration peaks:
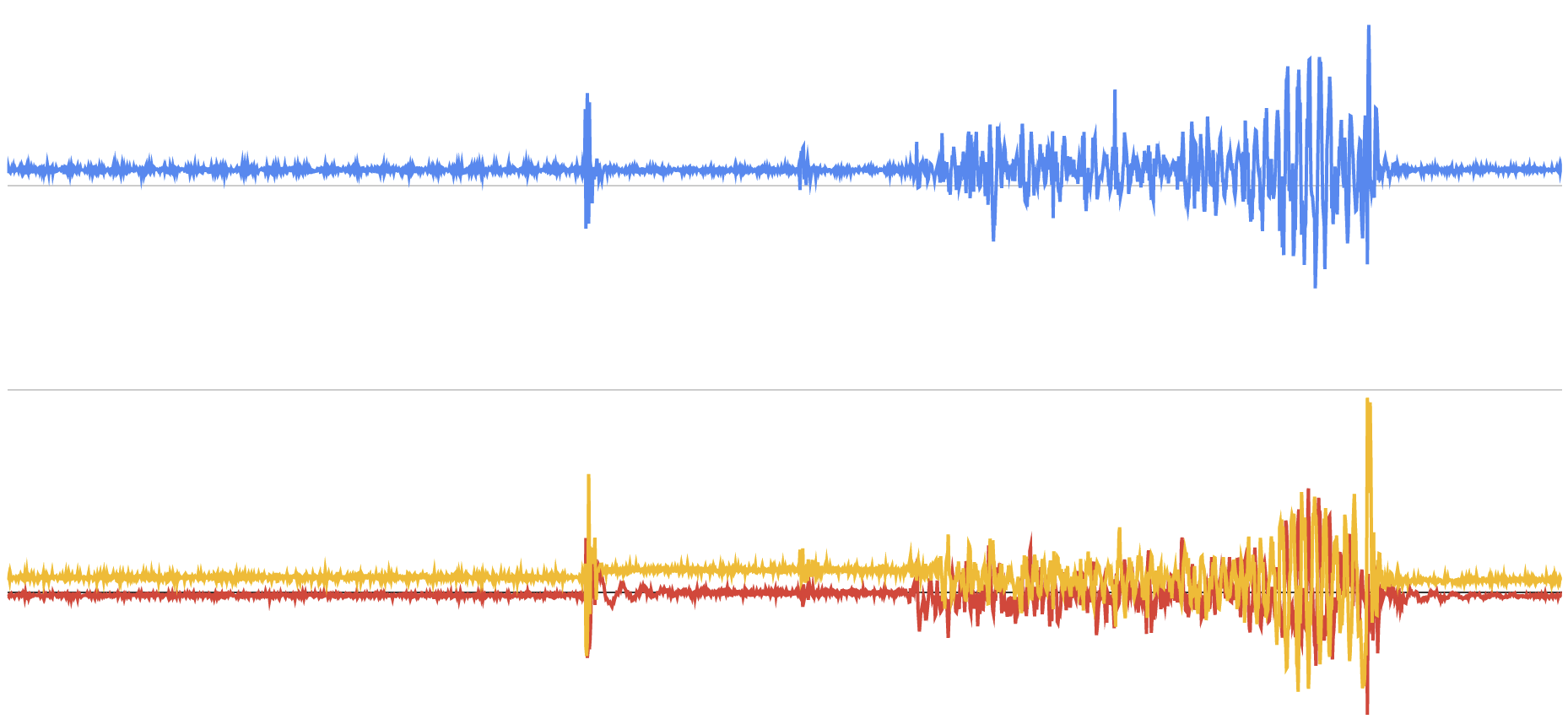
In the chart bellow, the first to peaks are taps, then robot starts to turn and turning generates noise with similar or higher amplitude than taps:

 GOAT INDUSTRIES
GOAT INDUSTRIES
 MavisEverly
MavisEverly
 Danya0x07
Danya0x07
 KarolGalka
KarolGalka