MiKa
MiKa-
Stabilised parking process
12/29/2021 at 22:38 • 0 commentsAs a result of the limited space under the kitchen cupboard, the robot occasionally has difficulties returning home to the docking station. The robot gets stuck on the cabinet feet foot plate. The parking process then cancels after a few minutes.
To solve the problem, I partially redesigned the door lifting mechanism in order to provide more space to the robot. In addition by raising the floor (of the lane to the docking station) to the level of the foot plate, the robot can drive over it so that 4 cm of more space can be gained.
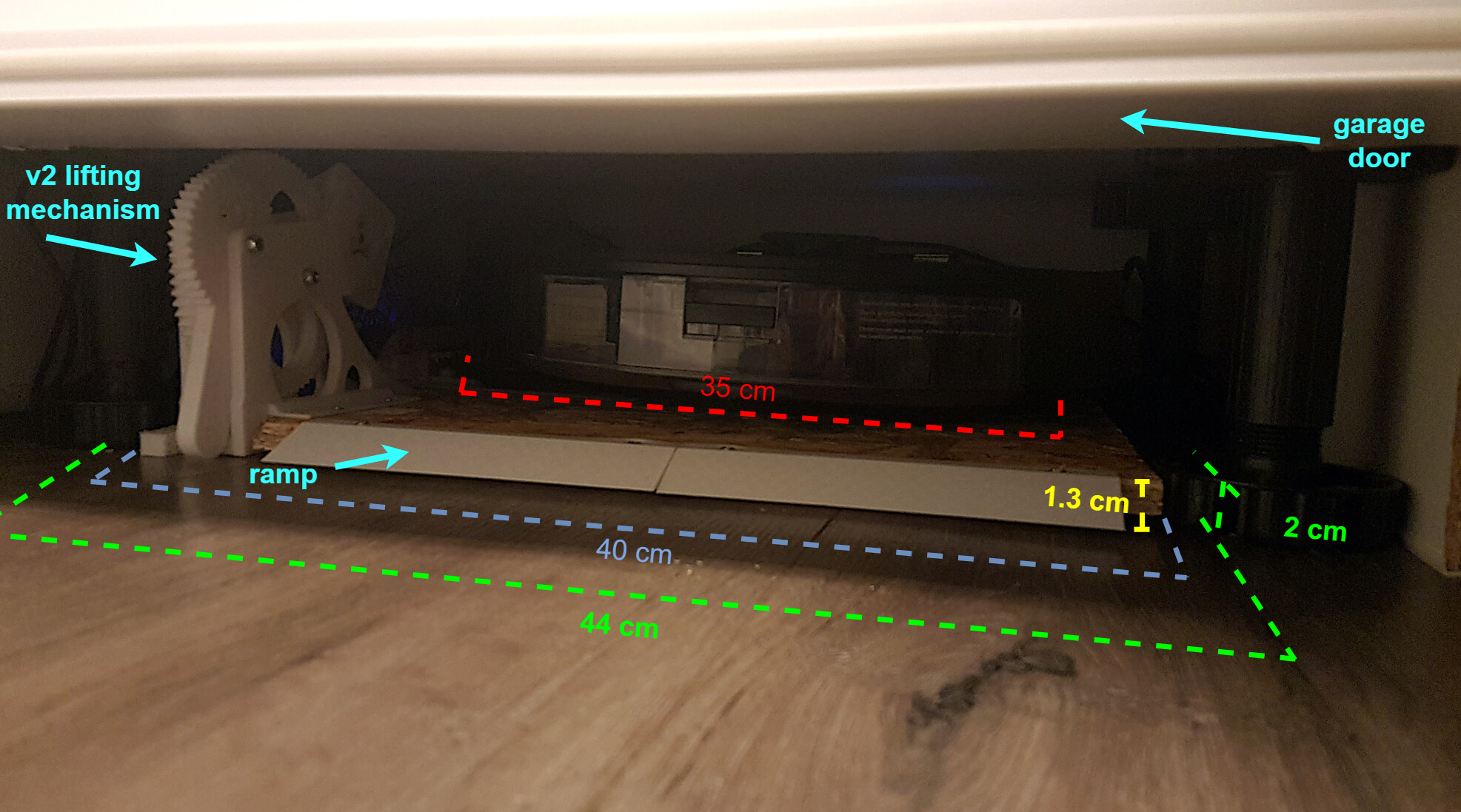
Parking lot dimensions
![]()
The wooden plate increases the floor level by 1.3 cm so that the robot can drive over the plates of the cabinet feet and doesn't get stuck on them any longer.
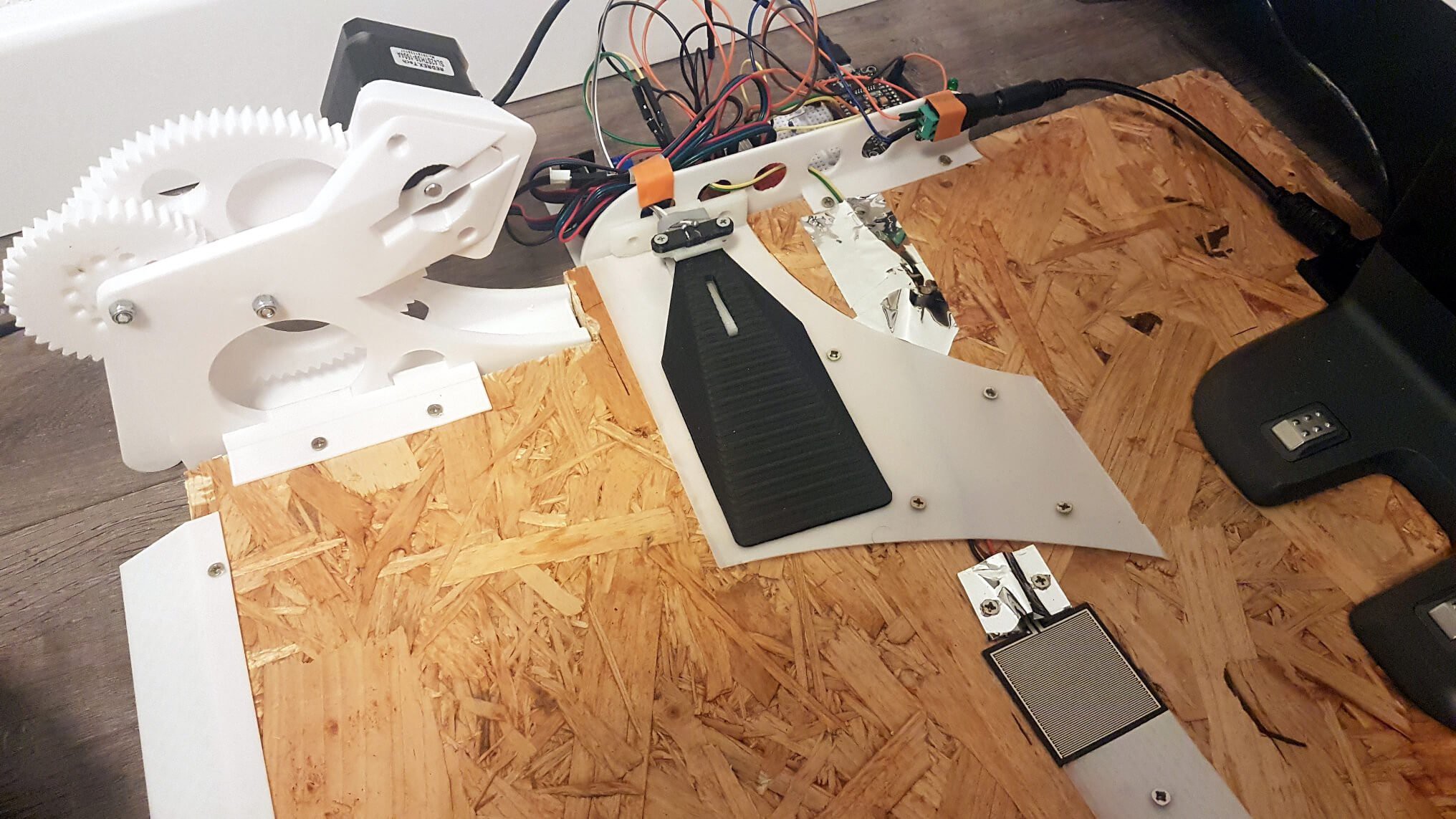
Base plate
![]()
The wooden plate is also great to mount the door lifting mechanism and the other parts on it.
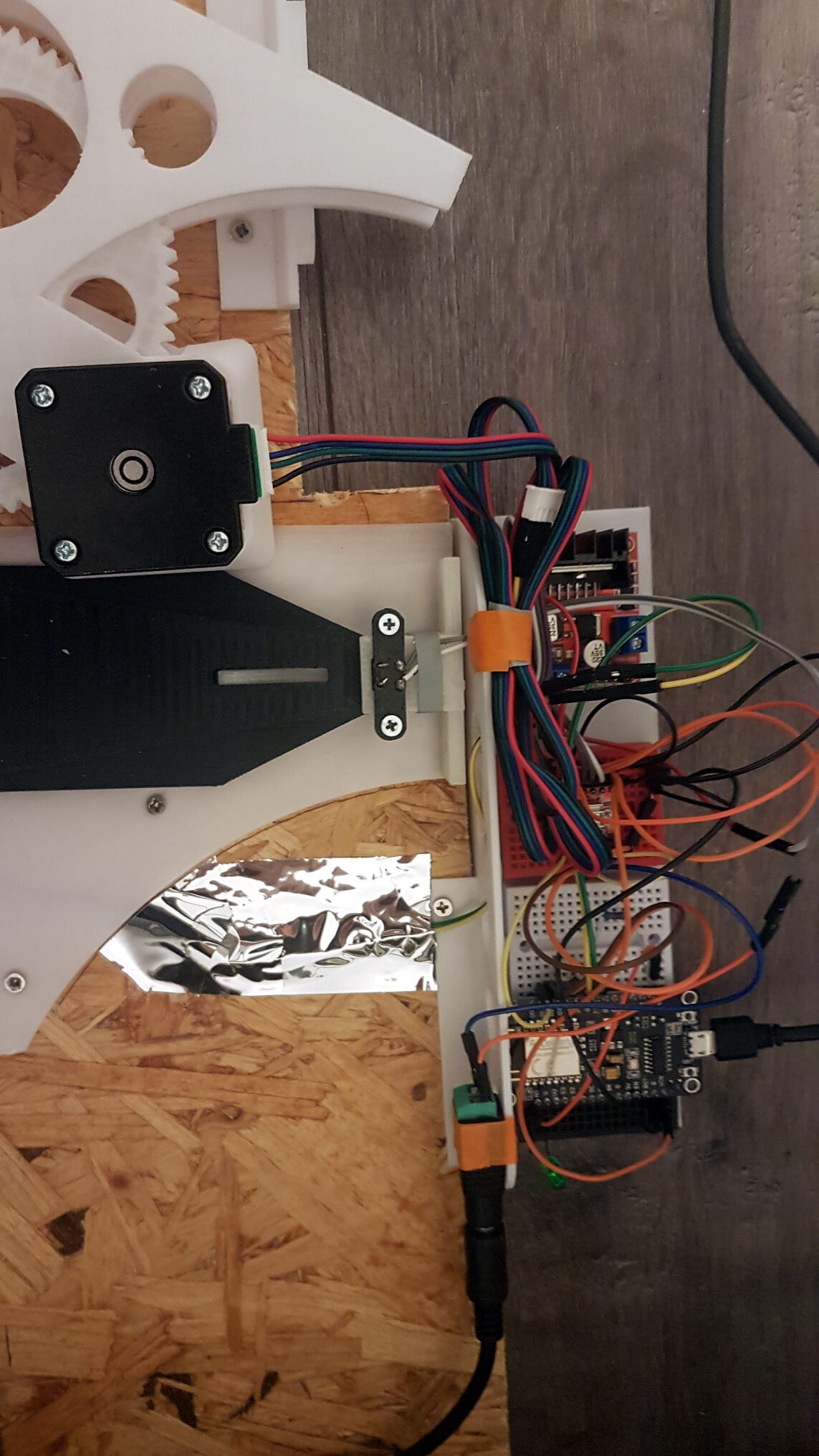
v2 door lifting mechanism
![]()
Unlike in v1, the motor in v2 is on the left side of the lifting mechanism. That creates additional space.
All parts are now attached to the wooden plate by screws. No more double-sided adhesive tape required, no risk of parts loosening. The wires of the force sensitive resistor are also fixed and cannot be unclenched by the robot's brushes.
Pluggable v2 lifting mechanism mount
![]()
Because the height of the garage is also limited, the door lifting mechanism cannot be attached directly to the wooden panel, otherwise the panel cannot be pushed past the feet under the cabinet.
The mount that is fixed on the wooden plate has two arcs of a circle that fit into the round holes of the lifting mechanism mount. The mount is brought up to the plate at an angle and then set up at a 90 ° angle to the plate. As a result it is then fixed by the weight of the plate.
The new STL models are available on github. All changes were made in PR #2
-
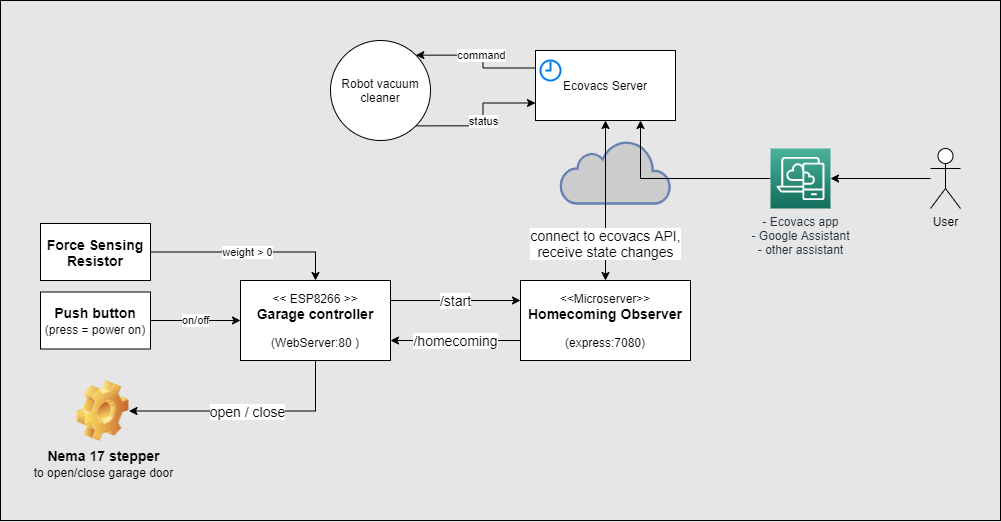
How it works
04/11/2021 at 16:28 • 0 comments![]()
The ESP8266 operates a nema 17 stepper motor that lifts the kitchen skirting board up and down. As long as the robot is in parking postion, one of the robot's wheels stand on an inverted push button so the ESP is powered off. The power is turned on when the robot starts leaving the docking station. On startup the controller executes the following startup routine:
void setup(){ Serial.begin(9600); // stepper pins pinMode(enablePin, OUTPUT); pinMode(stepPin, OUTPUT); pinMode(dirPin, OUTPUT); // force resistance pin pinMode(frsPin, INPUT); openDoorWaitAndClose(); // function waits 30 sec before closing the door again // connect to home WiFi WiFi.mode(WIFI_STA); WiFi.begin(ssid, password); Serial.print("Attempting to connect to WPA "); Serial.println(ssid); if (WiFi.waitForConnectResult() != WL_CONNECTED) { Serial.println("WiFi failed!"); return; } Serial.println("connected"); Serial.println(WiFi.localIP()); // register API endpoints on ESP8266WebServer server.on("/open", handleOpenDoor); // for test usage server.on("/close", handleCloseDoor); // for test usage server.on("/homecoming", handleHomecoming); // for use by nodejs server server.onNotFound(handleNotFound); server.begin(); Serial.println("HTTP server started"); // send signal to nodejs server wakeupBackendService(); }The nodejs server opens a connection to the Ecovacs REST API and starts to listens for inbound status notification events. If the "returning" event is received, the program forwards the event via http to the ESP8266WebServer
const observe = async () => { if (vacbot !== undefined) { console.log('Already observing') return } console.log('Start observing') const connectStatus = await api.connect(username, passwordHash) const devices = await api.devices() let vacuum = devices[0]; vacbot = api.getVacBot(api.uid, EcoVacsAPI.REALM, api.resource, api.user_access_token, vacuum, continent) vacbot.on('ready', async (event) => { console.log('Vacbot ready') vacbot.on('CleanReport', async (state) => { console.log('CleanReport: ' + state) if (state === 'returning') { disconnect() vacbot = undefined console.log('Try open garage door') var response = await openGarage() console.log('Garage door opens...') let i = 0 while (response !== 200 && i < 5) { i++; console.log(`Error ${response}, retry open garage door #${i}`) response = await openGarage() await sleep(500) } } }) }) process.on('SIGINT', function () { console.log("\nGracefully shutting down from SIGINT (Ctrl+C)") disconnect() process.exit() }); function disconnect() { try { vacbot.disconnect(); } catch (e) { console.log('Failure disconnecting: ', e.message) } } }The ESP is now set into homecoming mode. The homecoming function waits for the robot to run over the force sensing resistor, that is placed right in front of charging station, and closes the door in the final moment before the system is powered off again.
void homecoming(){ openDoor(); do { frsValue = analogRead(frsPin); delay(500); } while (frsValue == 0); // wait for force resistance sensor signal, the quickly close the door before the power is turned off closeDoor(); }
Space saving robot vacuum cleaner garage
Automatic control of the kitchen skirting board. Lifts up to 1 kg, zero power consumption on standby.