Adrian Prinz
Adrian Prinz-
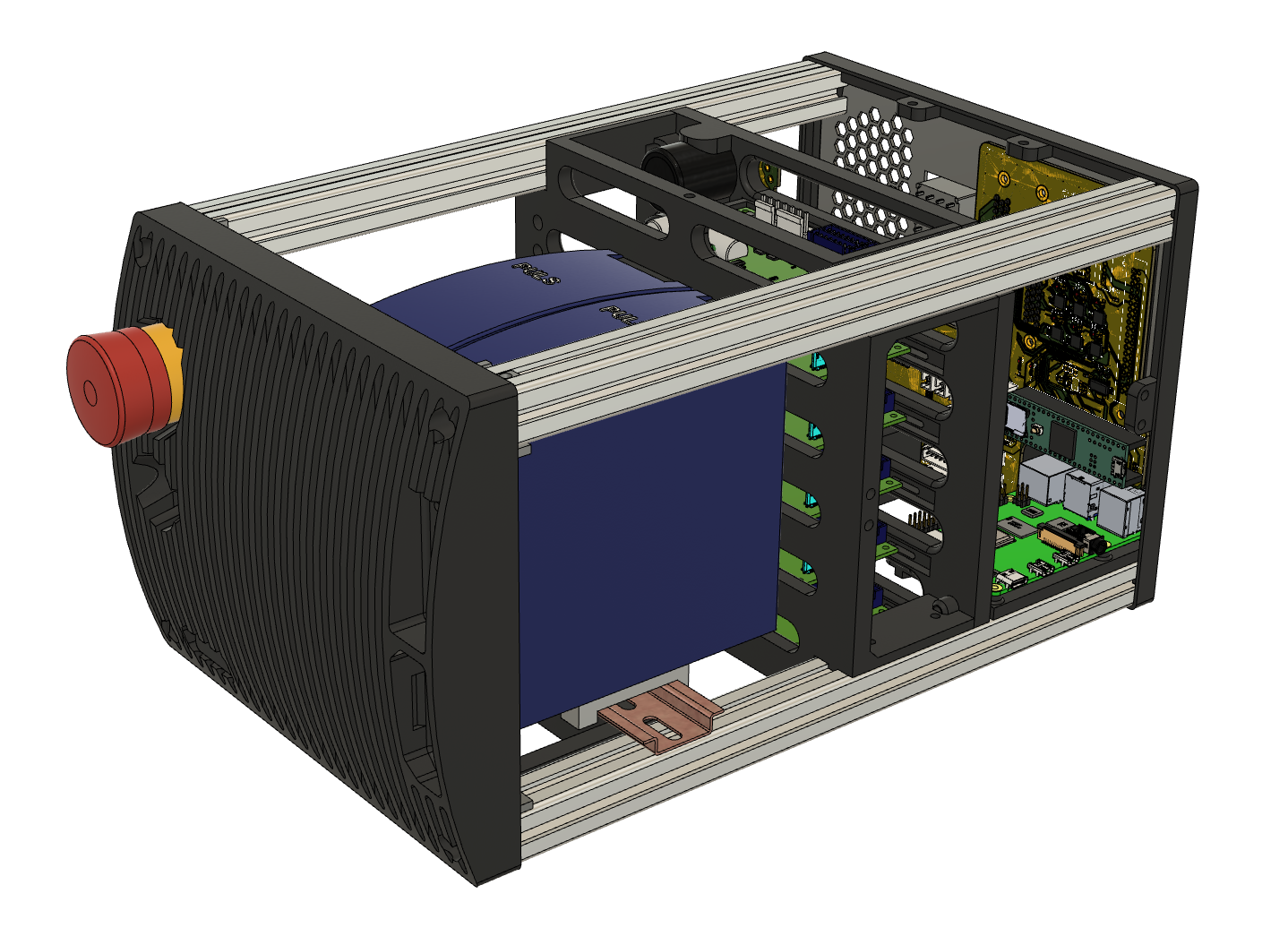
6# External Electronics Enclosure design
08/15/2023 at 13:35 • 0 commentsFor housing all the electronics I designed a external electronics enclosure. This includes:
- Safety electronics
- 24V and 5V power supplies
- Motor drivers
- power distribution PCB
- main IO and sensor PCB
The roboter is connected to the enclosure via a single connector. Peripherals can be connected via a secondary connector.
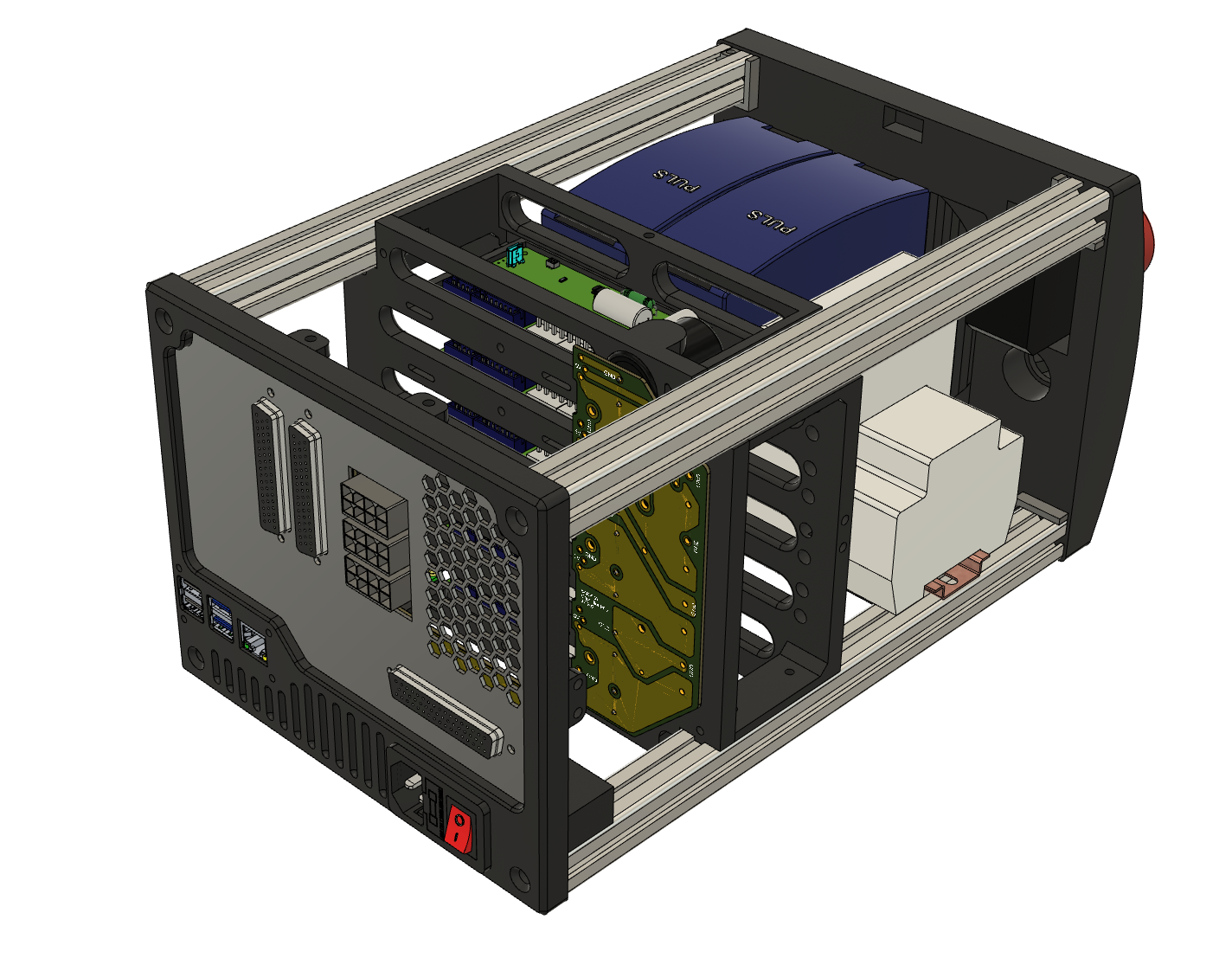
The electronics enclosure:
Front side with E-stop, on of switch, Led indicators and HMI connector
![]()
Backside with the described connectors for the robot and peripherals:
![]()
-
5# Robot test setup
08/15/2023 at 13:22 • 0 commentsFor testing the robot I additionally designed a table that can withstand the forces involved when robot is accellerating.
![]()
-
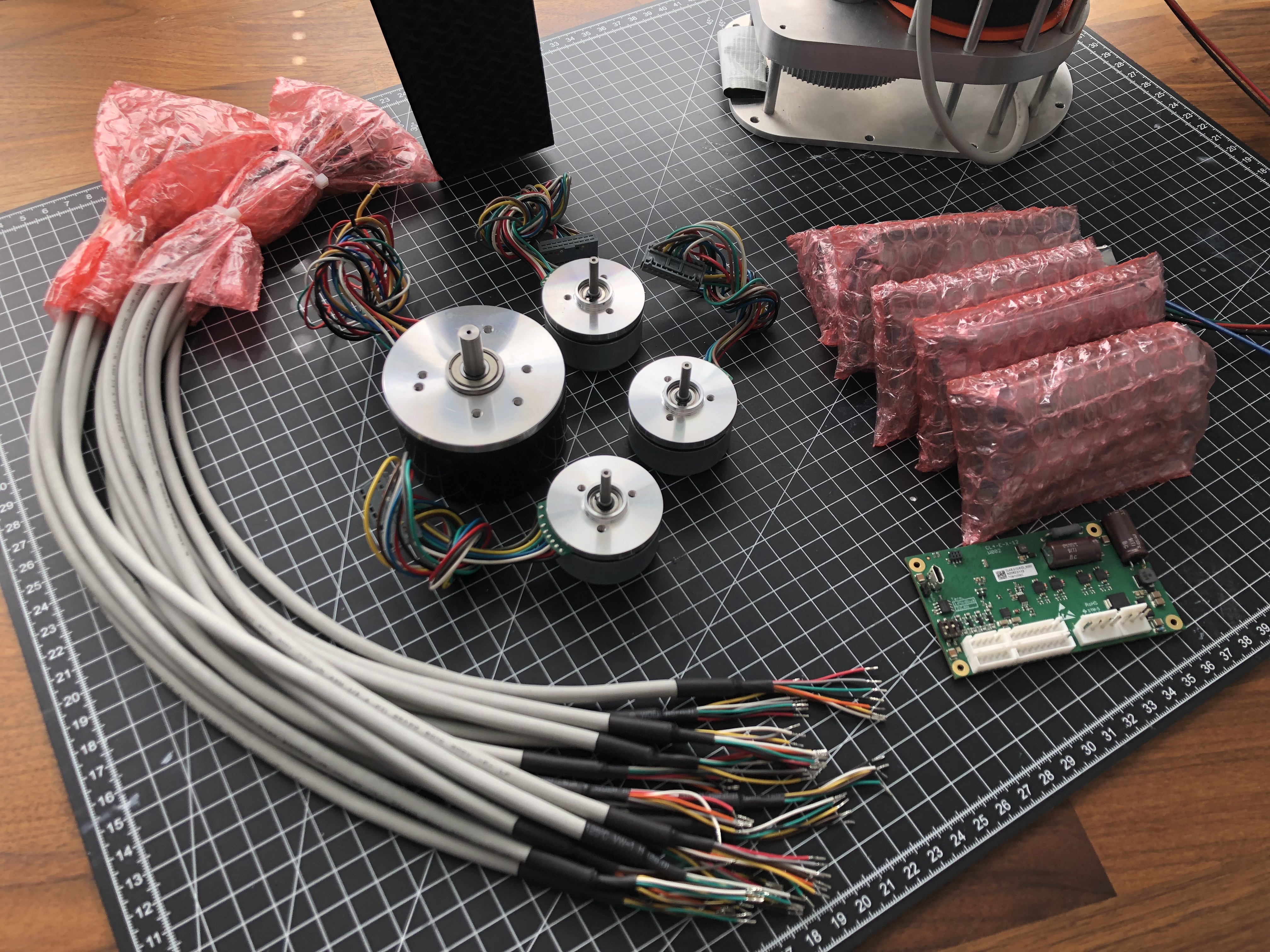
4# Drive components for the 3rd to 6th robot axis
08/15/2023 at 13:19 • 0 commentsOverview of the Nanotec BLDC motors and drivers:
![]()
BLDC Motors:
The first two axis are driven with the larger BLDC motors the rest with the smaller ones.
![]()
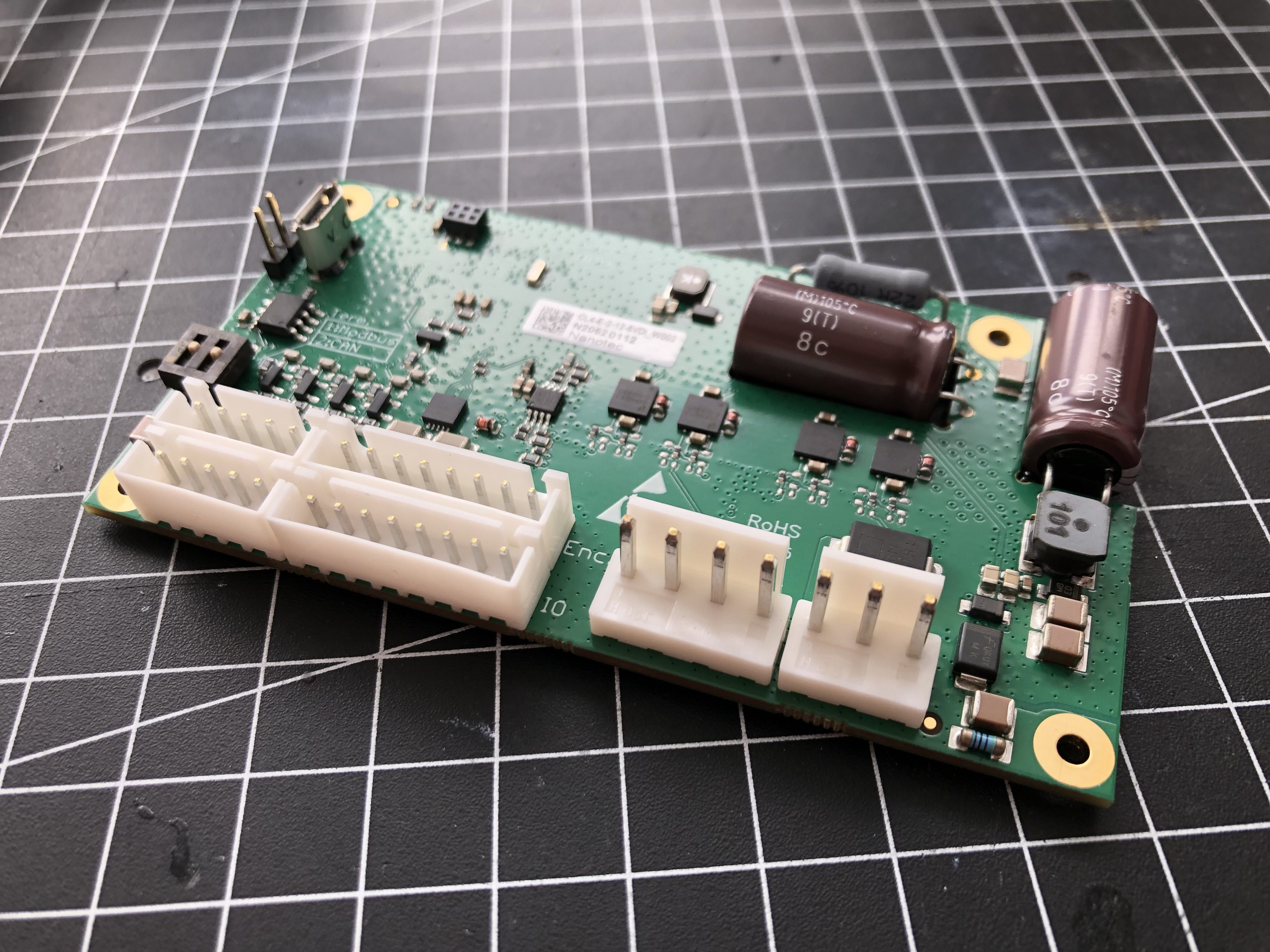
BLDC Motor Drive:
![]()
-
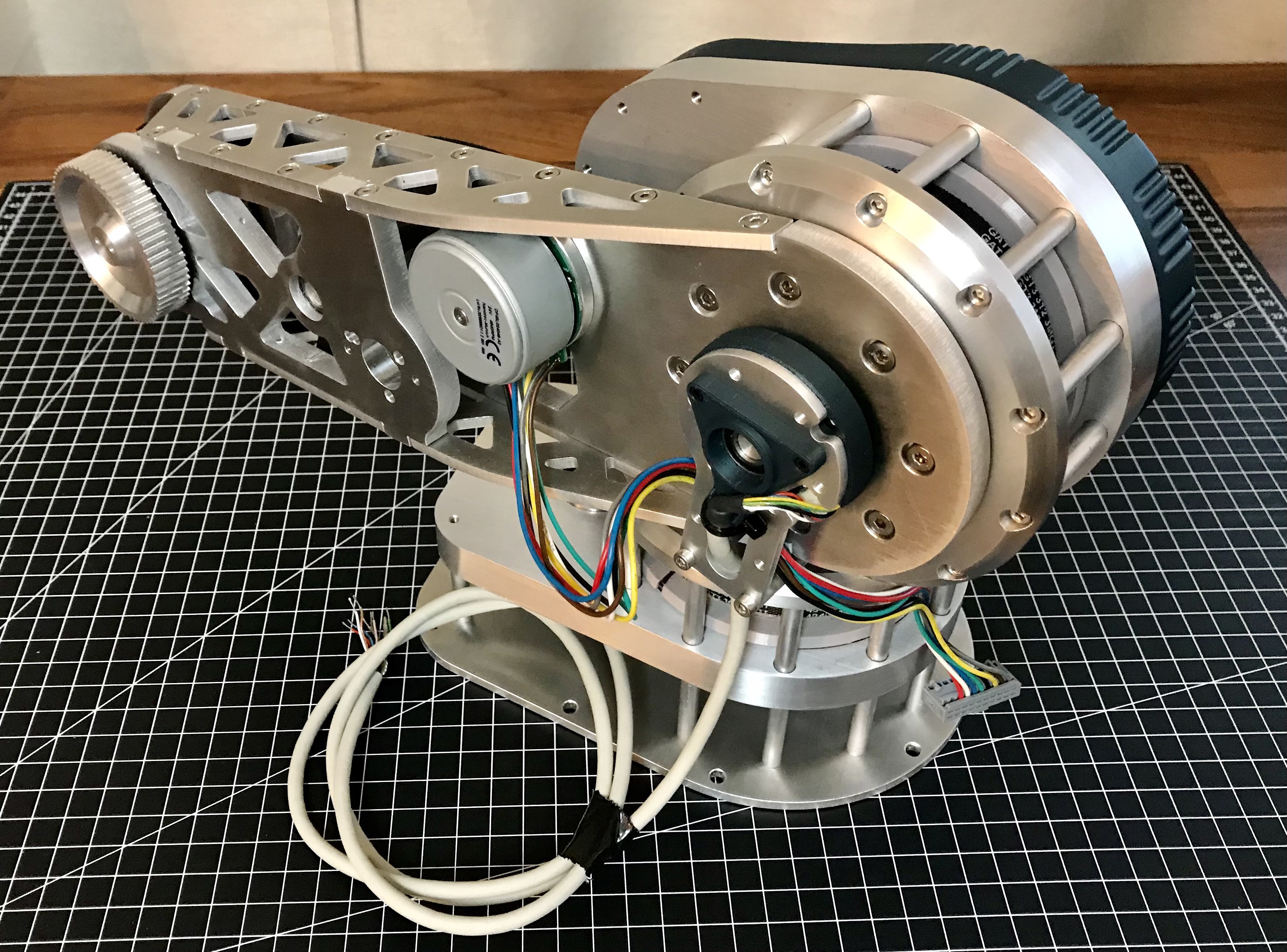
3# Motion components for the 3rd to 6th axis
08/25/2021 at 14:06 • 0 commentsThe first 3 axis are assembled and two motors and one Absolute encoder is fitted. For now just 2 motors are used for testing
Part-assembly of the first three axis:
![]()
![]()
-
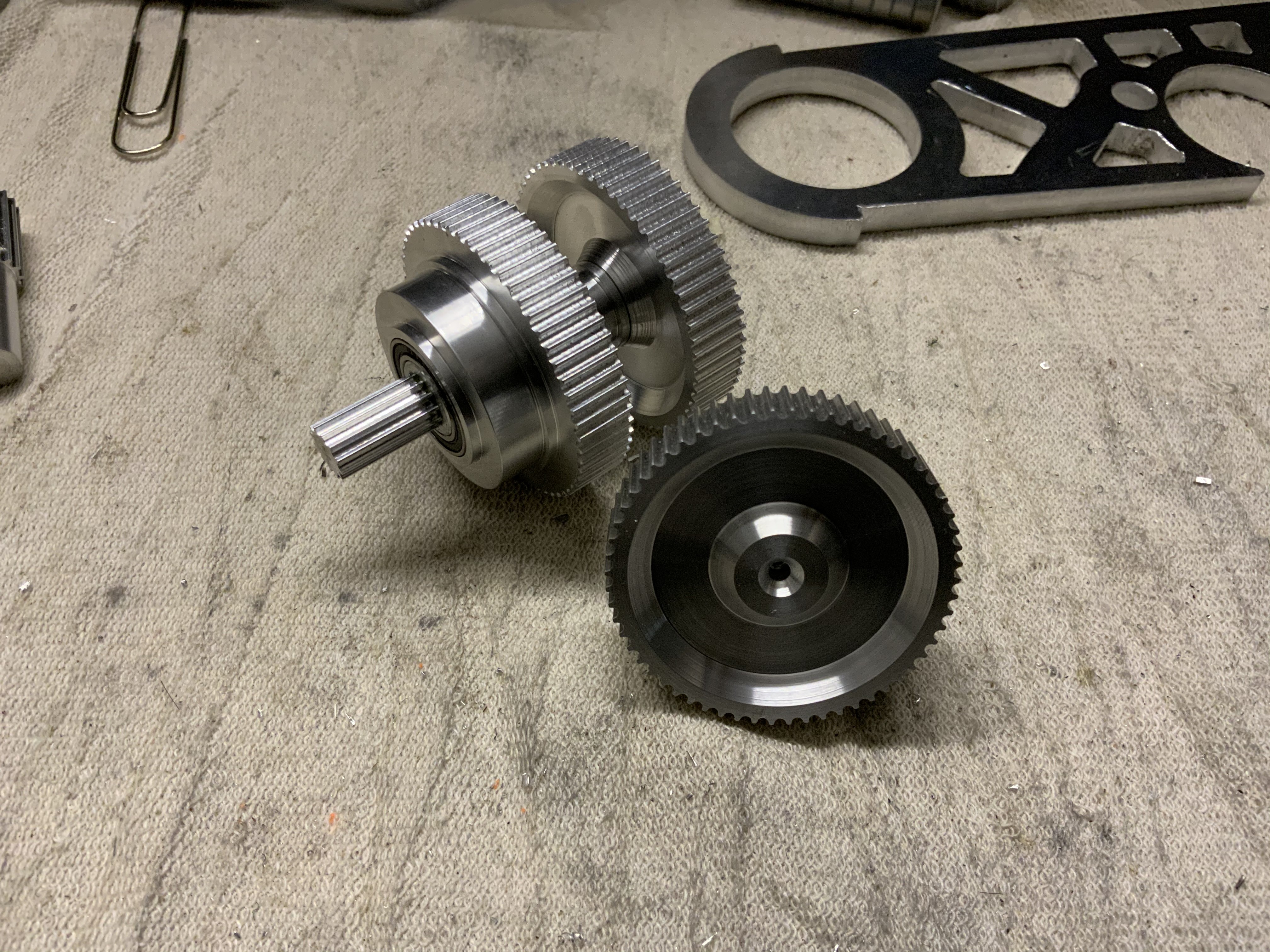
2# Manufacturing of the first three robot axis
05/15/2021 at 15:08 • 0 commentsAll the mechanical components for the first 3 axis are build/ machined using my diy CNC mill and a bechtop lathe
The following pictures show a few examples of the components that I machined:
![]()
Belt pulleys:
![]()
Bearing cage of the second axis:
![]()
-
1# 6-Axis-Roboter design
05/15/2021 at 15:06 • 0 commentsThe overall 6-Axis-Robot was first engineered and designed using Matlab and Fusion 360.
The completed robot design is shown in the following picture:
![]()
The dimensions of the roboter where mainly orientated on the capabilities of my machines (e.g. my diy cnc milling machine)
The drives where dimensioned based on kinematic calculation as well as dynamic simulations using Matlab. This way I was able to make sure that the robot will fullfill the requirements I imagined for this project.
Dynamic 6-Axis Robot from scratch
I developed a 6 axis robot with half a meter reach and 3kg payload. It is servo driven and features absolut encoders on all axis.