 Loukas K.
Loukas K.Project choices and the mission
As stated in the summary, my goal is to provide an open solution to the bipedal walking problem, in order to give others a starting point and source of inspiration. This includes hardware designs, drawings, assembly plans, a BOM and the full software stack to make the robot walk. The repositories will be updated as I continue the project, so you will also have access to more advanced features / the full humanoid when I get to that part.
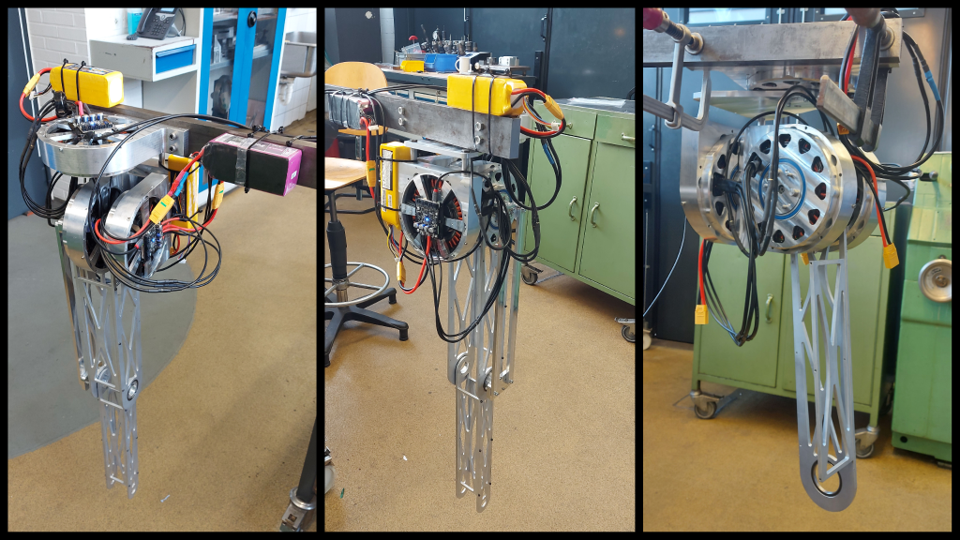
The original reason for starting to learn about humanoid robots was that I wanted to develop better and safer rescue forces for any kind of natural disasters or situations where humans risk their lives to save others. This is the long-term goal and I'm still in the early stages, but I at least wanted to share my vision and motivation for this project. The bipedal platform I am currently developing will be expanded with an upper body soon, but I figured the walking part is already a project in and of itself.
As you will find out below, the project is split up into Hardware and Software, both of which are elaborated on below in a mostly chronological manner. First some explanations, though:
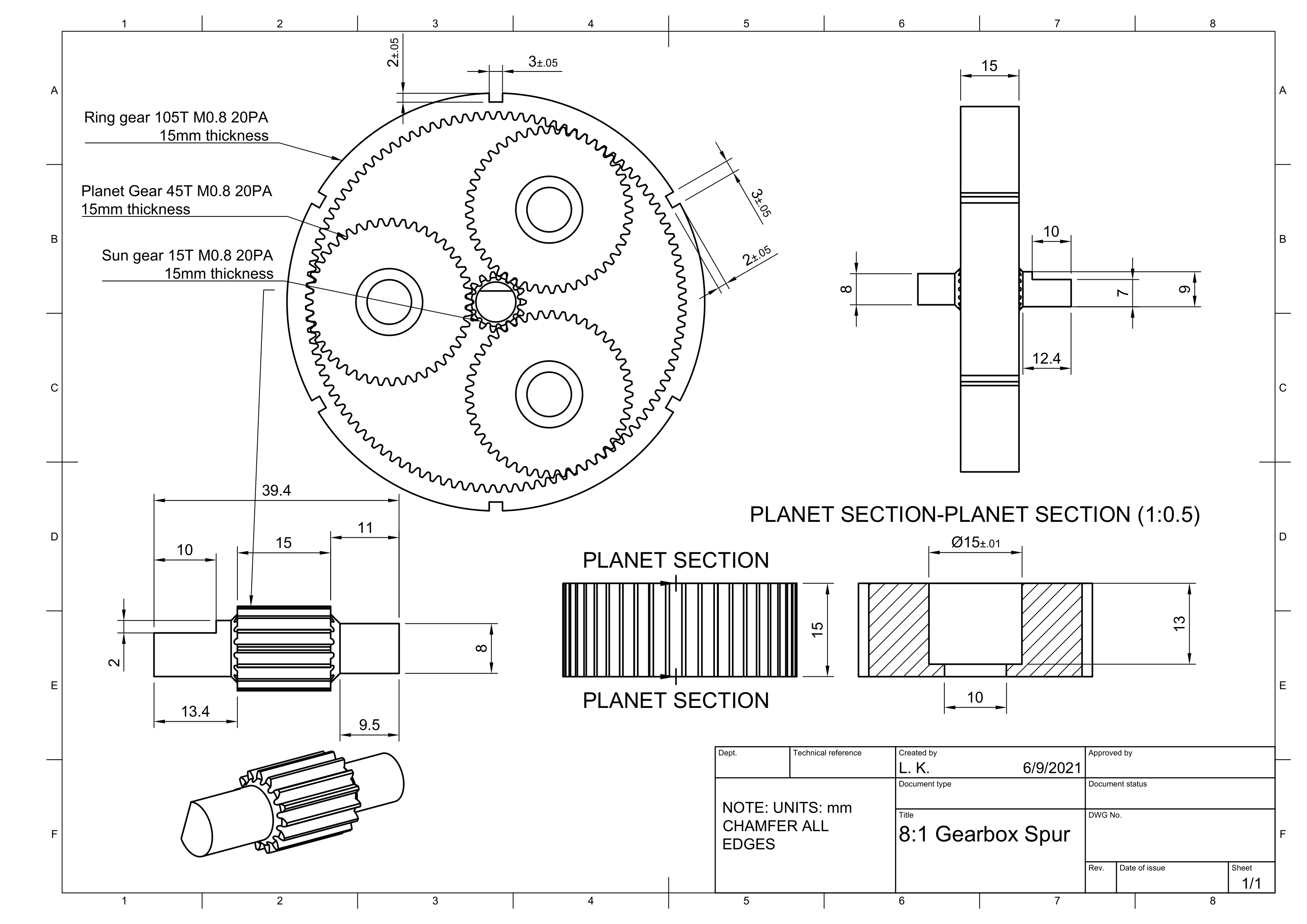
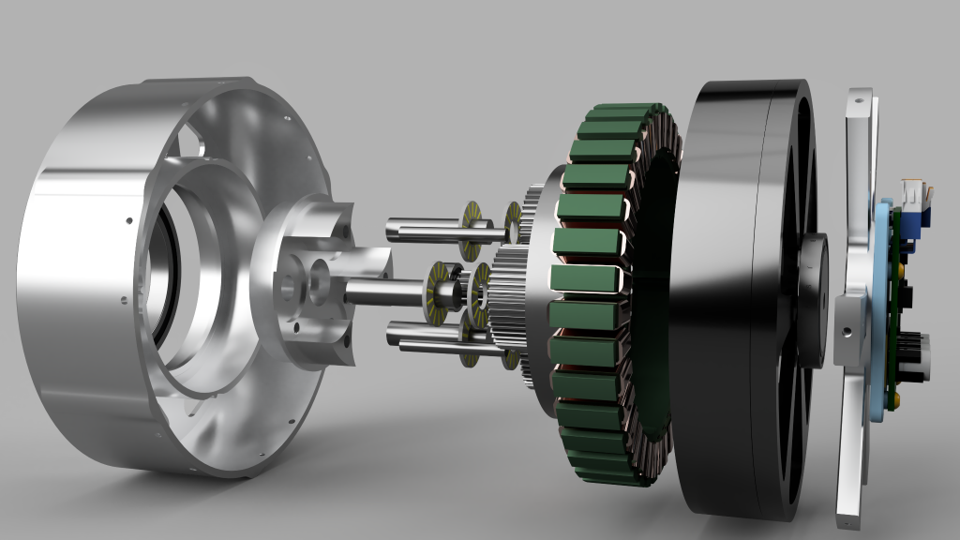
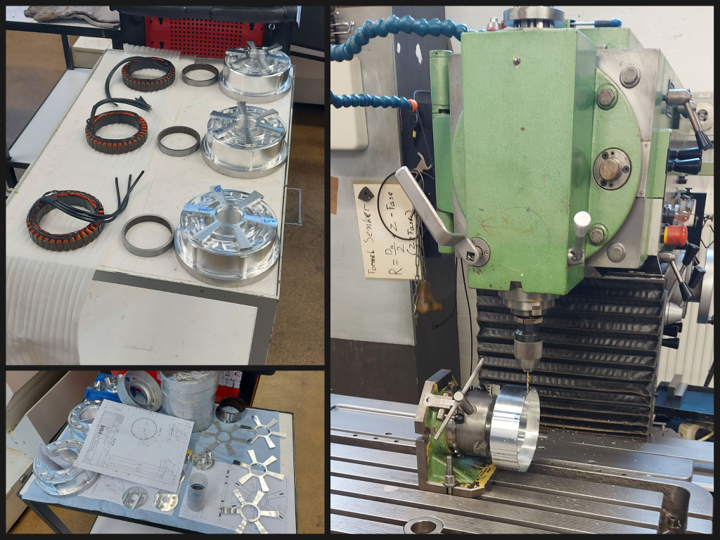
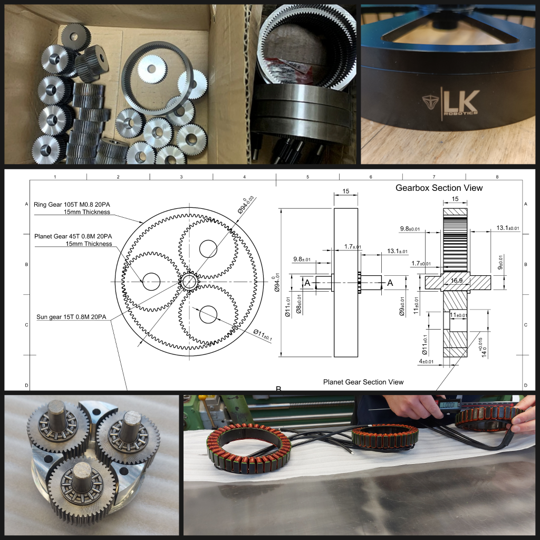
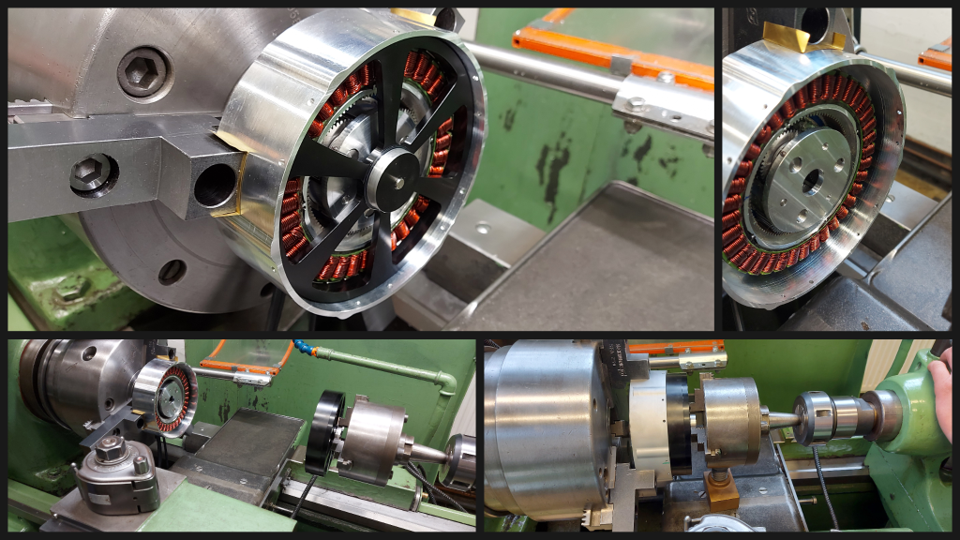
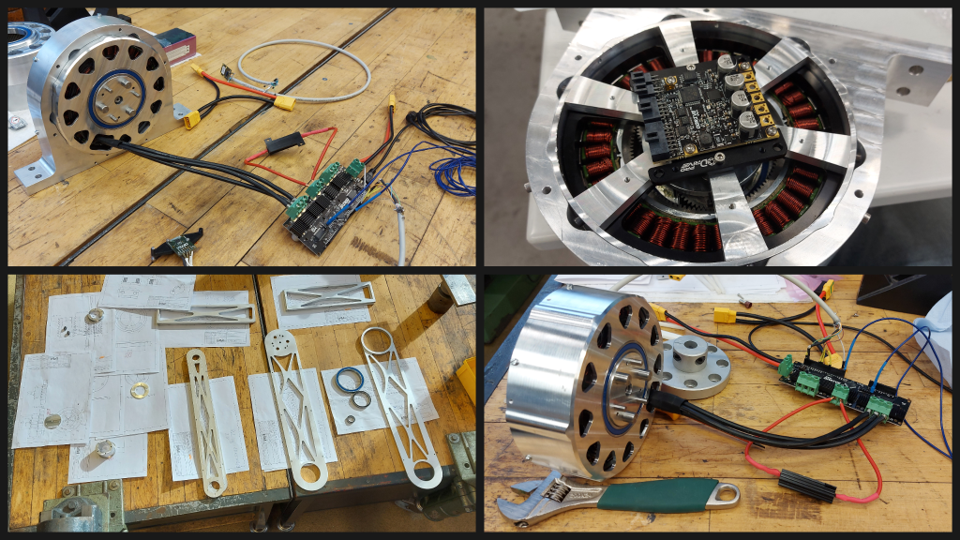
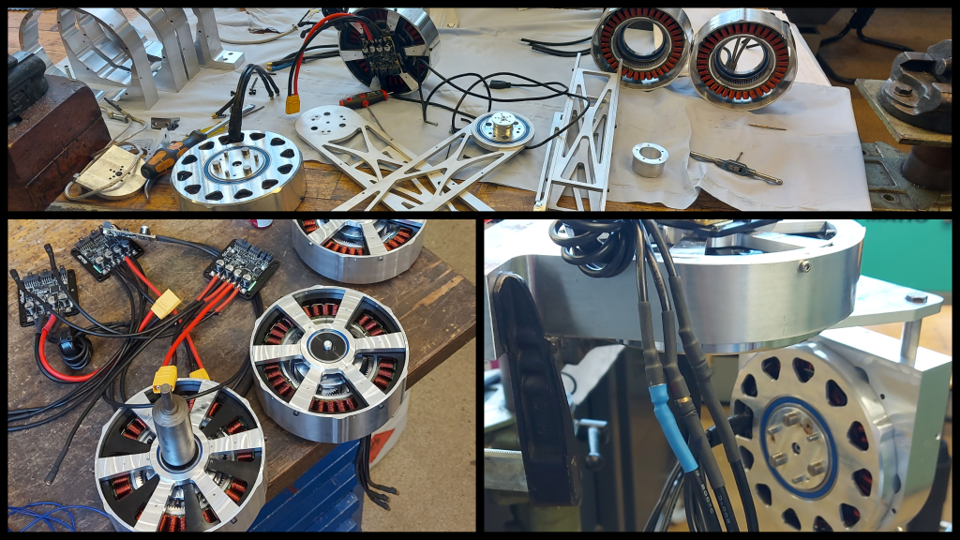
I did extensive planning of the hardware building phase, including assembly plans, drawings for all parts of the servo and simulations / FEA for all servo parts using Ansys Mechanical, as well as a detailed BOM for every part in the servo. This is also where you will find cost estimates, if you are wondering about that.
Over time, I noticed a number of incredibly tricky issues (at least tricky to me and the almighty WPBack, who helped me for countless hours over Discord), which were not mentioned once in any of the papers, maybe because they only arise when working with significantly less stable two-legged robots or because there is a difference between actual implementation and theoretical explanation. Still, it surprised me that there was no real resource that discussed those issues and possible solutions.
 Even though the code base became increasingly messy due to most time being spent on debugging, I chose to do what no one else seemed to want to do and open-sourced all repositories, thus providing others with one potential solution to the problems they might face. Here they are:
Even though the code base became increasingly messy due to most time being spent on debugging, I chose to do what no one else seemed to want to do and open-sourced all repositories, thus providing others with one potential solution to the problems they might face. Here they are:Main C++ code base for real-time controller
Simulation part, containing Gazebo config files and plugins
Jupyter Notebook containing the calculations and experiments I made to learn MPC
Jupyter Notebook containing the full derivation of a 5DOF serial leg
What I like about this, is that anyone can take this code base and do whatever they want with it, and I think I would have liked that a lot when studying this, especially for the following reasons (in no particular order):
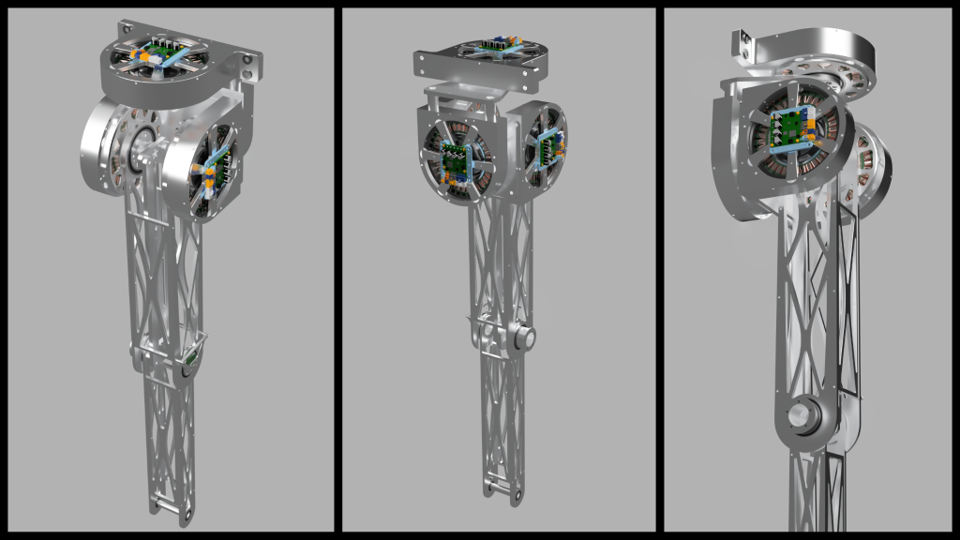
- The robot being simulated has full CAD, drawings and assembly plans shipped with it, meaning anyone can replicate the design.
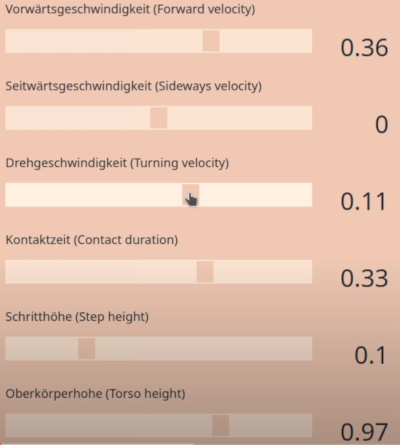
- I tried parametrizing everything I could. Inertia, mass and distance in all 3 coordinate axes of each leg link, gait frequency, step height and length, walking height, all this is variable in real-time or in a few seconds. The same applies to the equations of motions of the leg itself, they are also kept fully modular within the Jupyter notebook and allow for very quick adjustments. I have personally already used this to check what leg setup performs better.
- Complete freedom about where to go from here. Be it merely changing the leg parameters / kinematic structure or even rewriting controller portions, many interesting variations can arise. In my opinion, this is also very valuable because it gives "users" a chance...
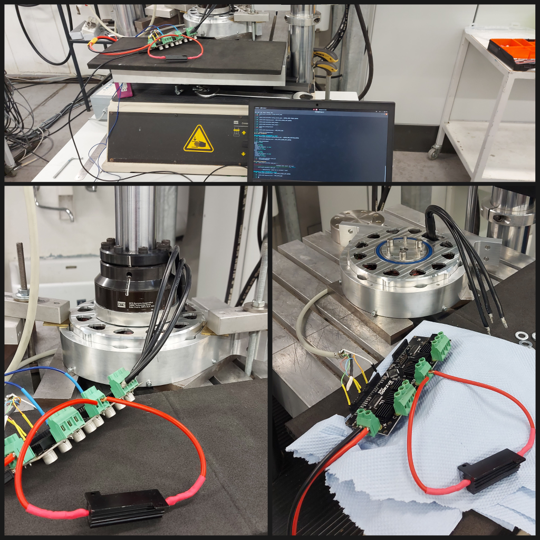
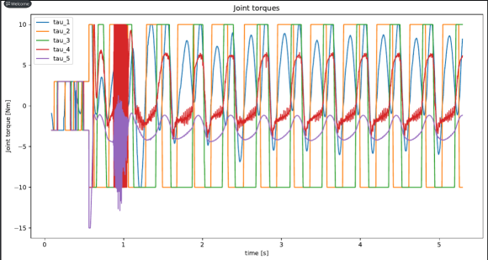
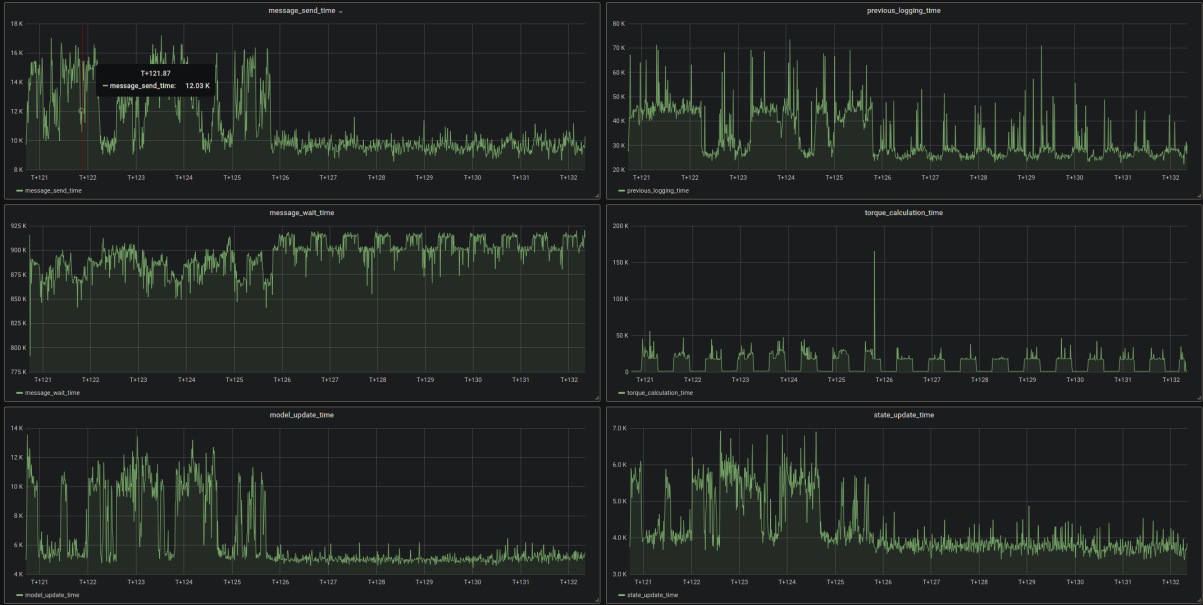

 ... I started logging both controller side and simulation side, suspecting the controller is working with too old state information. And there it was!
... I started logging both controller side and simulation side, suspecting the controller is working with too old state information. And there it was!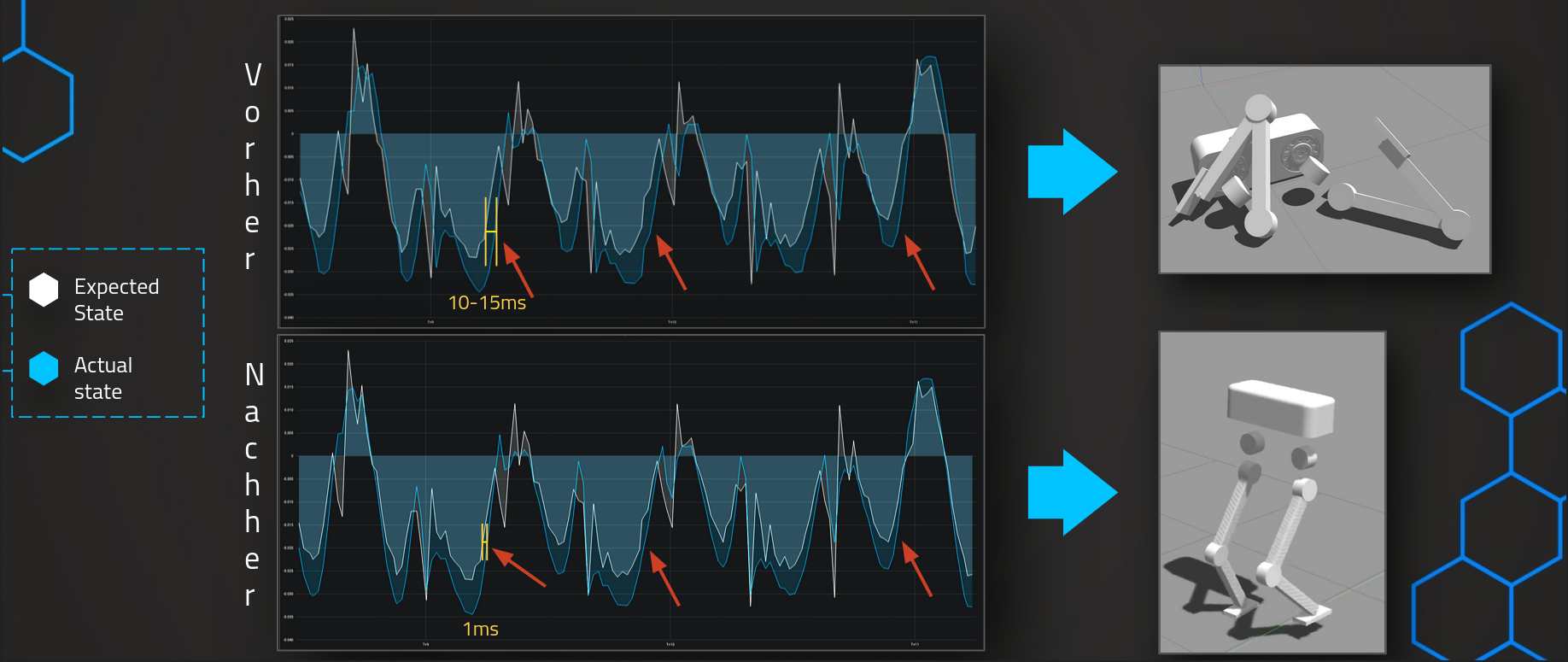



 Owen Trueblood
Owen Trueblood
 therobotstudio
therobotstudio
 David Greenberg
David Greenberg
 Anthrobotics
Anthrobotics
This is incredible! Where can we find the CAD for the robot?