 New Dexterity
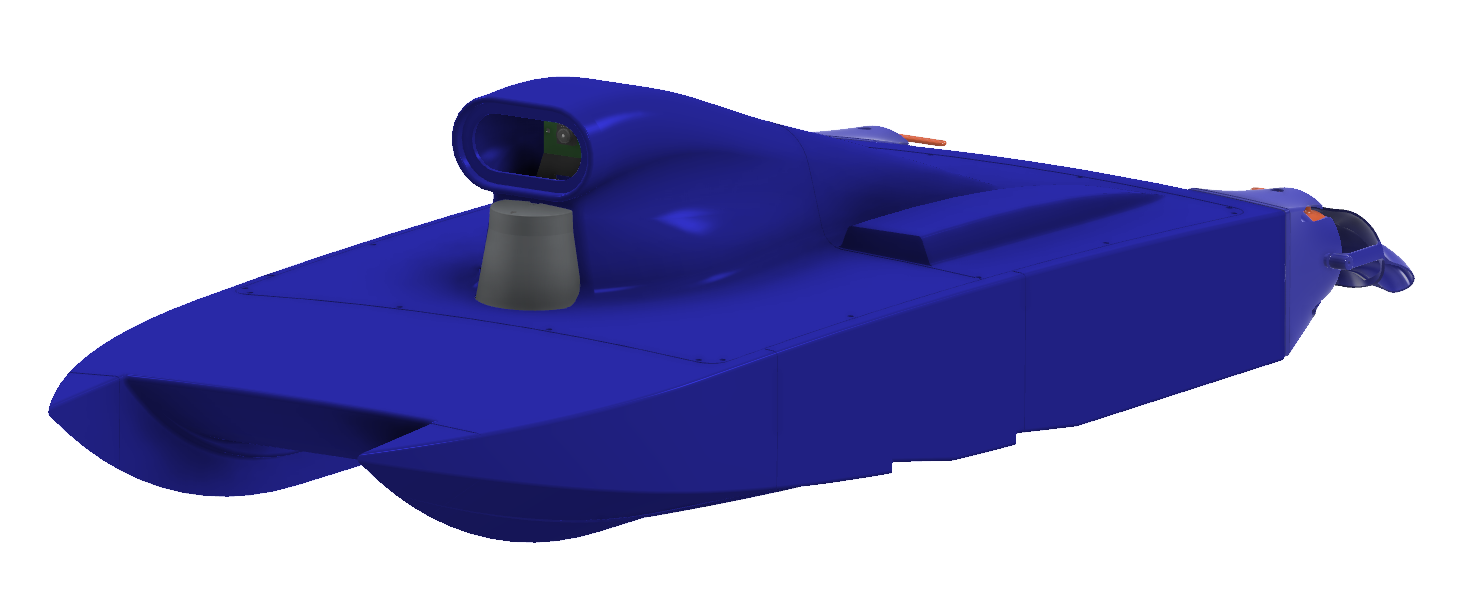
New DexterityAutonomous boats can have a plethora of applications related to sea life and pollution monitoring, search and rescue, border patrol, inspection of internal waterways and the open ocean, among others. Moreover, the design, development, and control of such platforms poses some excellent engineering challenges related to mechanical design, autonomy, robustness, ability to perceive and navigate the highly dynamic and unstructured turbulent water environment, etc. In this project, we focus on the design, development, and experimental validation of open-source, low-cost, waterjet-power robotic speedboats for education and research. The proposed speedboats are developed based on a modular hull and a waterjet propulsion system that are both 3D printed. The speedboat design is easy to replicate and maintain, and it can accommodate all the sensors needed for autonomous navigation, such as, LiDAR, monocular vision, GPS and more.
Water-jets allow the platform to:
i) operate in shallow waters,
ii) reduce the risk of entanglement, and
iii) reduce any risk of injury to users or sea-life.
The efficiency of the speedboats has been experimentally validated through velocity, thrust, and efficiency testing and real-world deployment. The designs are disseminated in an open source manner and they are accompanied by a speedboat racing competition that involves both dynamic and static events. These resources are expected to be valuable for robotics researchers and for lecturers that want to introduce hands-on assignments in courses related to robotics and autonomous systems.




























 Seth Fleming-Alho
Seth Fleming-Alho
 Giovanni Durso
Giovanni Durso
 Thane Hunt
Thane Hunt
Nice job, can you share the stl instead of the GCODE please?