Robin Fröjd
Robin Fröjd-
04-15
04/15/2022 at 11:46 • 0 commentsSensorless FOC testing. This baby got some speed! Hitting ~ 530RPM (end of video)
#bldc #quadruped #robotics #robot #RLS #Cubemars #KittActuator #Actuator #tmotor #design #quad #quadruped #robotjoint #Robots #vesc #foc https://t.co/CacXr5McKa
-
04-07
04/07/2022 at 20:51 • 0 commentsTesting the RLS AksIM-2 setup
DJ spin that enconder..
#bldc #quadruped #robotics #robot #RLS #Cubemars #KittActuator #Actuator #tmotor #design
-
04-05
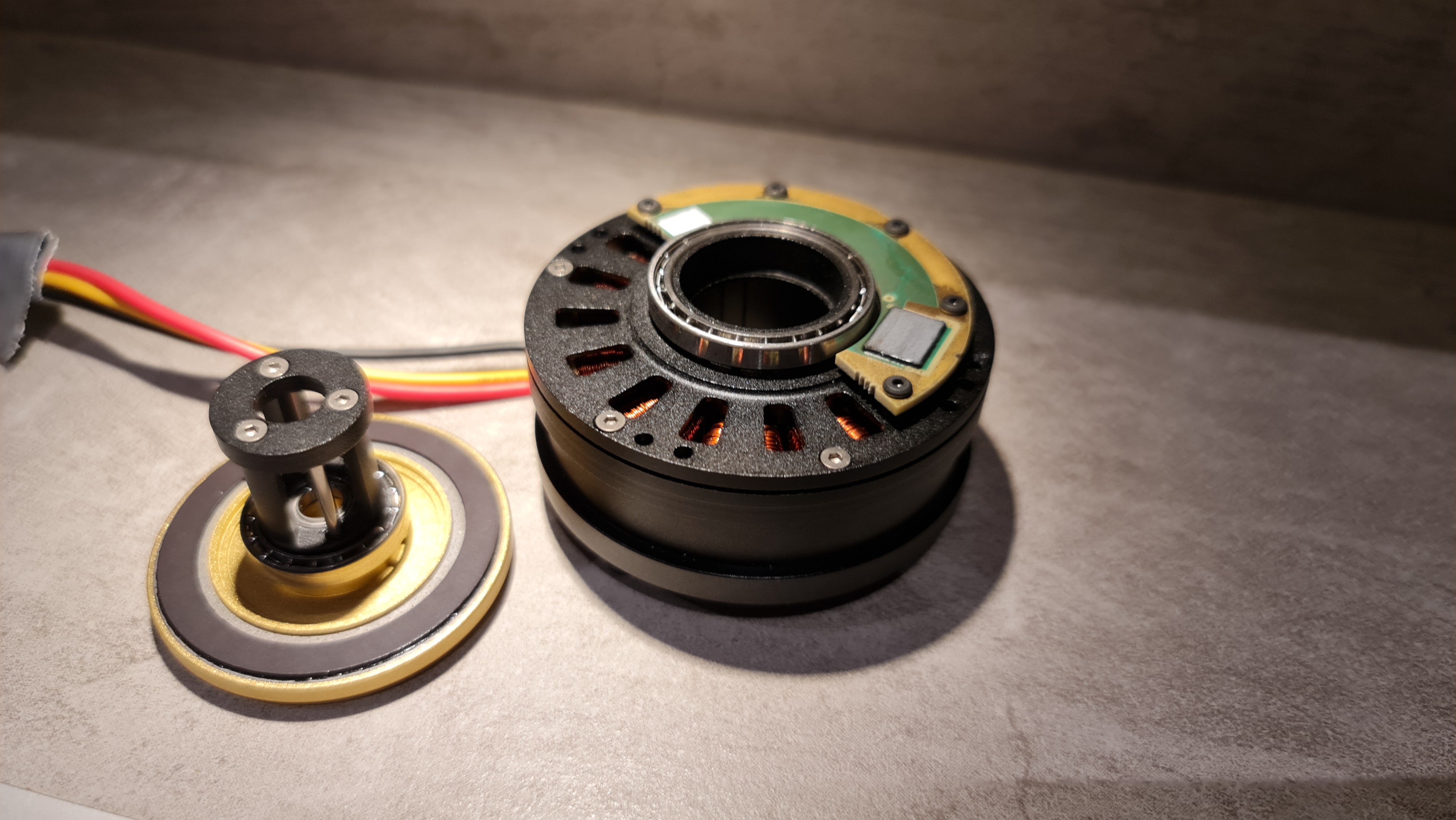
04/05/2022 at 18:51 • 0 commentsParts for rev2 have arrived (left in picture). Will do some assembly with motor and gear tonight
![]()
![]()
-
03-22
03/22/2022 at 14:41 • 0 commentsSecond version soon ready. ;)
![]()
-
03/10
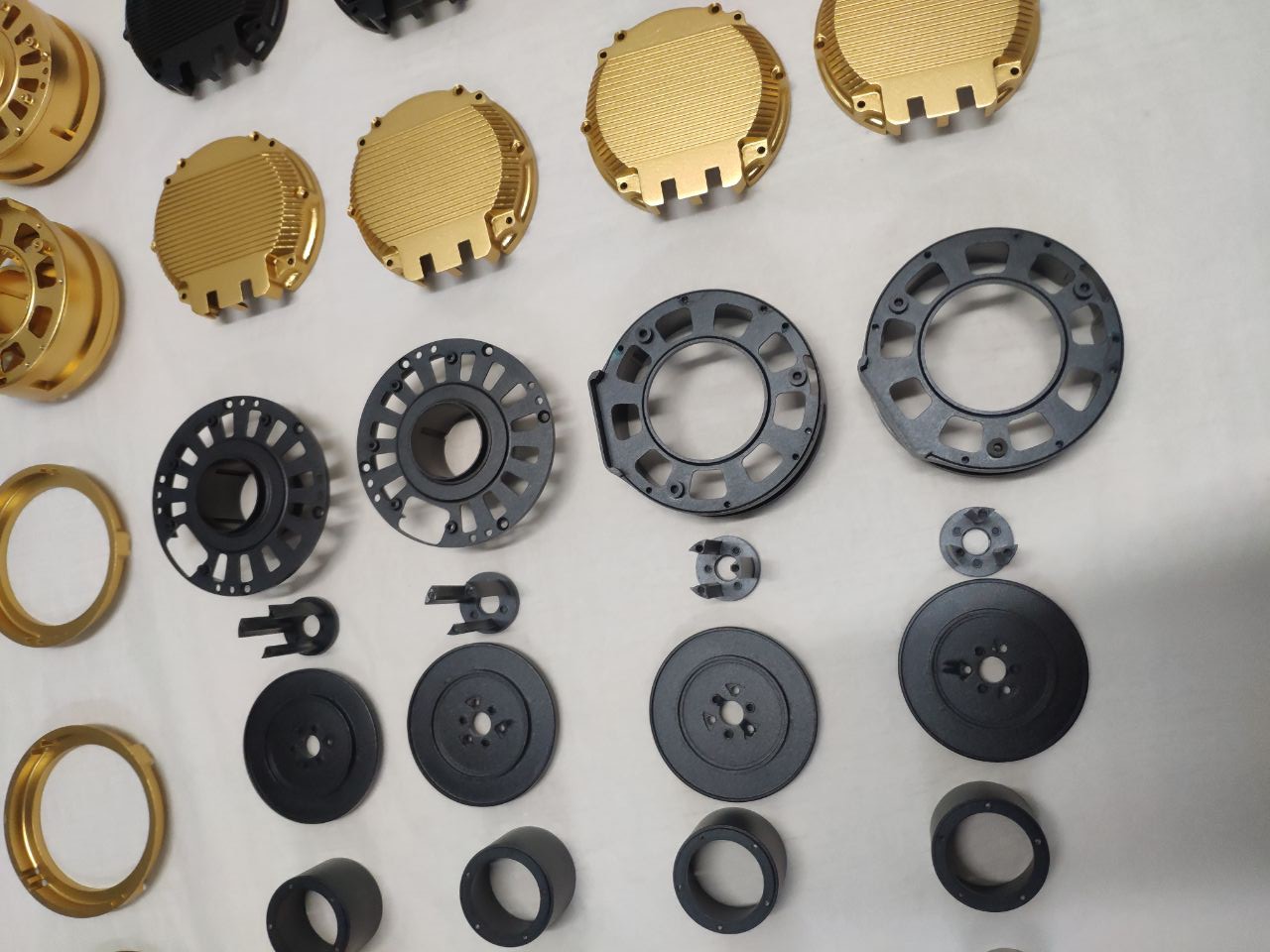
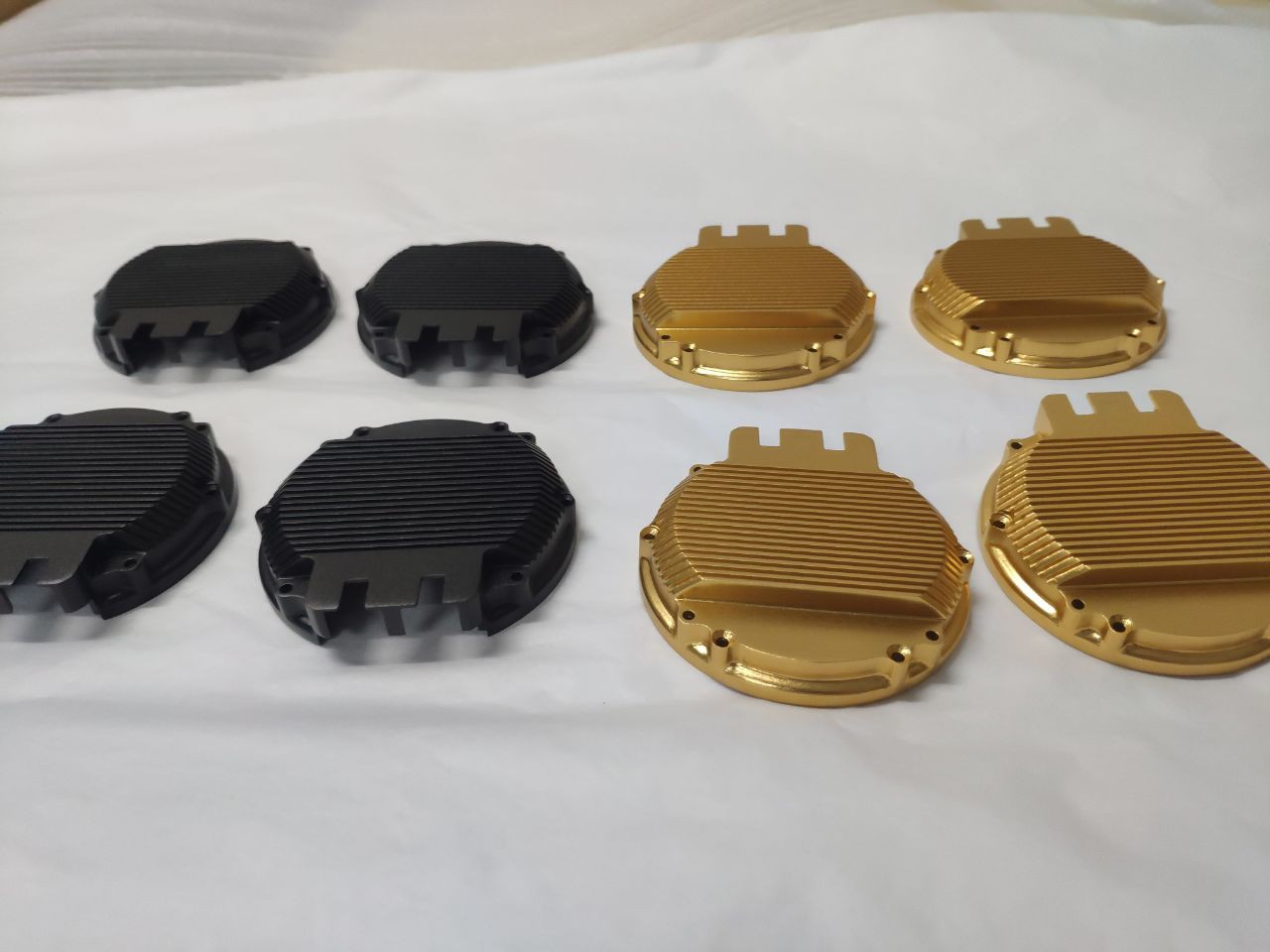
03/10/2022 at 14:22 • 0 commentsBack covers ready and looking sharp!
![]()
![]()
![]()
-
First assembly test spin
03/09/2022 at 17:56 • 0 commentsFirst assembly test spin 🙃
#bldc #quadruped #robotics #robot #RLS #Cubemars #KittActuator #Actuator #tmotor #design #quad #quadruped https://t.co/40TZt2YRKX
-
3/9-2
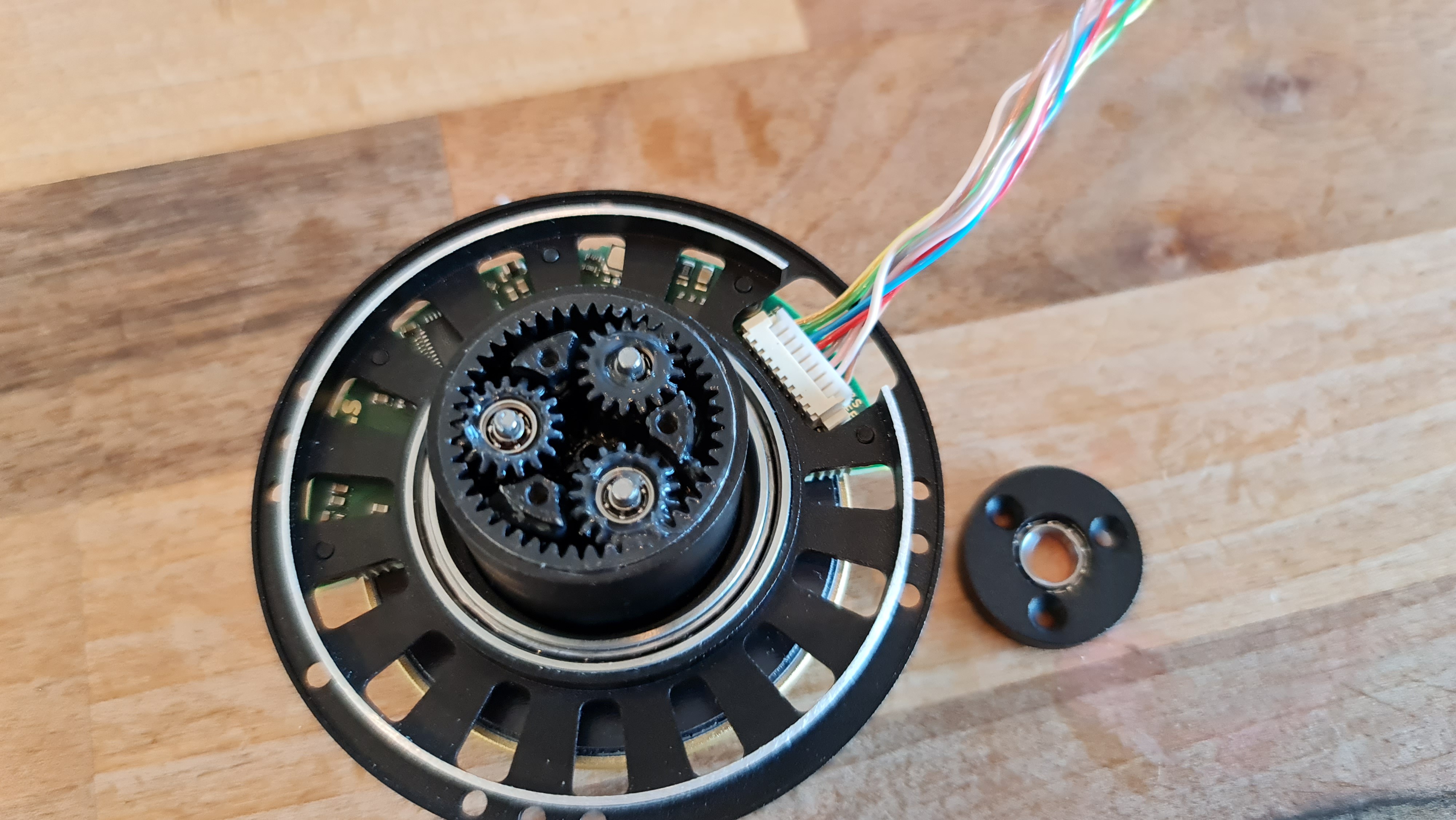
03/09/2022 at 14:36 • 0 commentsAlot of progress today. Got the gears today.
Some pics from the assembly![]()
![]()
![]()
![]()
-
03/09
03/09/2022 at 14:21 • 0 commentsNext version is cooming together.
![]()
![]()
![]()
-
03/08-2
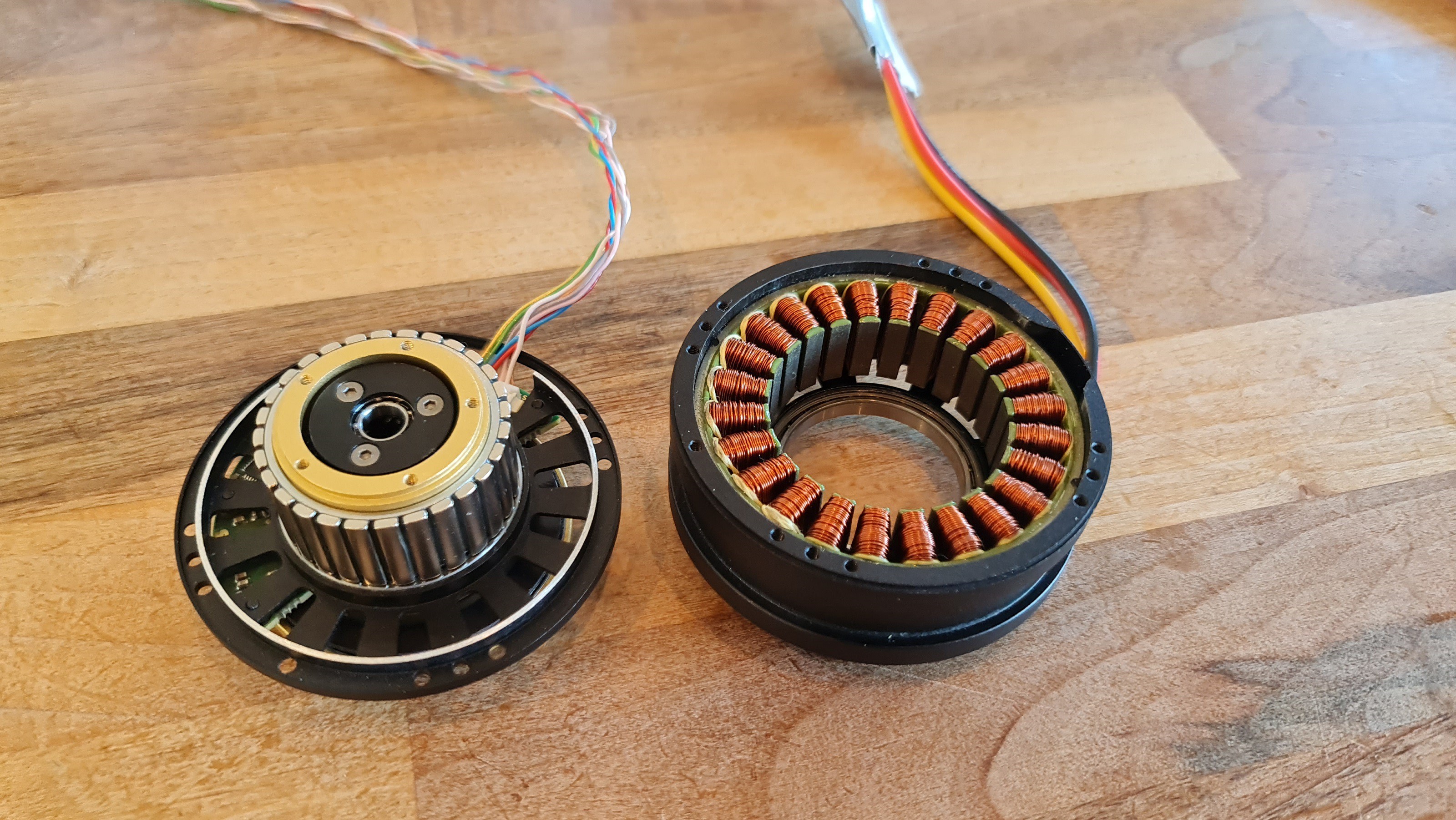
03/08/2022 at 10:55 • 0 commentsTest assembly of the carrier.
So the MRA049 ring (Magnet for RLS) is press fitted on the output.
Then the output is press fitted on the carrier and then screwed together.
The housing have a NSK 6705 bearing. The output is resting on the OD of the bearing.
A bit overkill. The housing also have room for a NSK 6703 bearing which the carrier is resting on. This is to minimize any type of movement on the output if any extended load is placed on the output.Then each of the carrier (pc1 / pc2) parts have a internal BR106 bearing which the drive shaft is resting on.
(still wating for gears)
![]()
![]()
![]()
-
03/08
03/08/2022 at 08:26 • 0 commentsSpin Unicorn spin!
Kitt actuator
Small size actuator 67x48 with 5.4:1 reduction ratio and dual encoders.