Now that yo have the device configured with the same parameters than in the Helium network, you must check if you're near a Helium hotspot so the packets can go to the Helium network.
If you're outside of the coverage the next steps will be hard to accomplish
12
First join
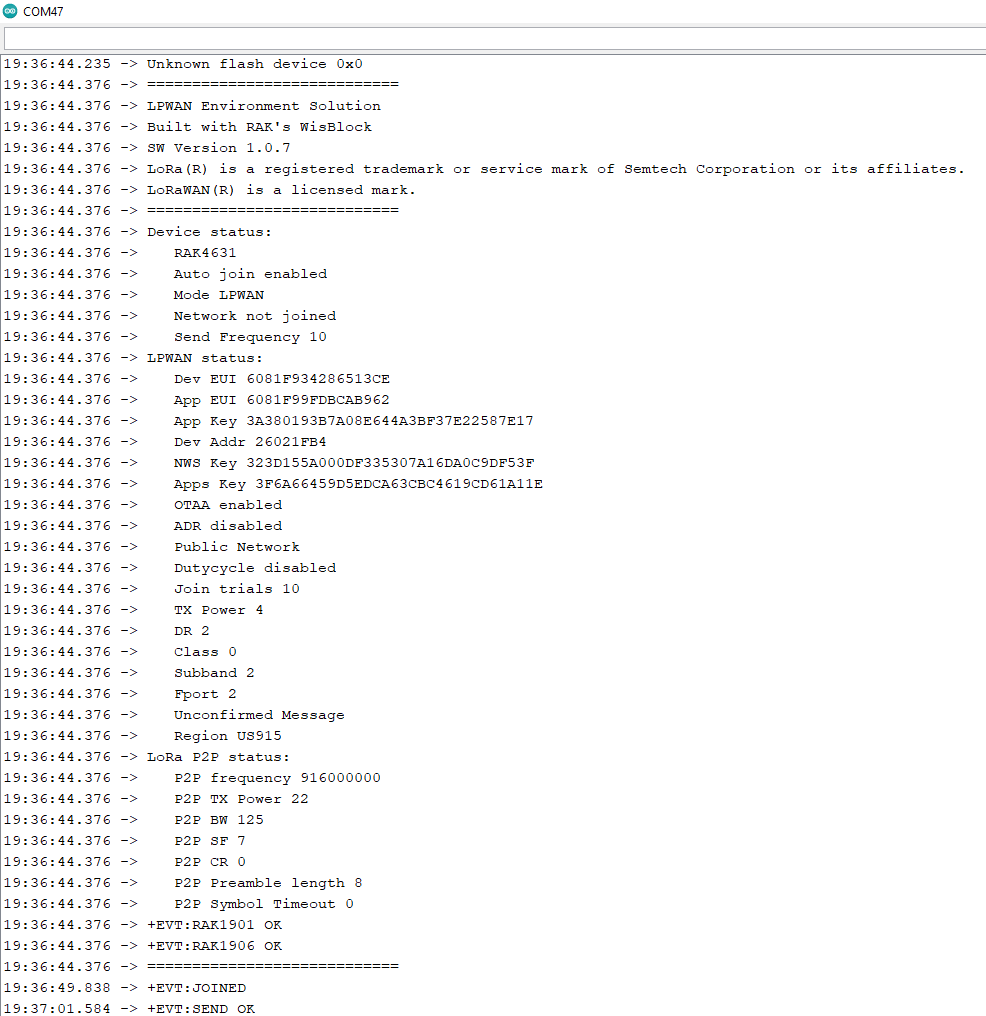
Once you have configured your device, and reset it, it will try to join to the network, once the communication with the Helium network had been made the device will start to send information to the Helium network and we should be able to see it on the console.
In this screenshots my device is configure to report each 10 seconds, so i can debug quickly
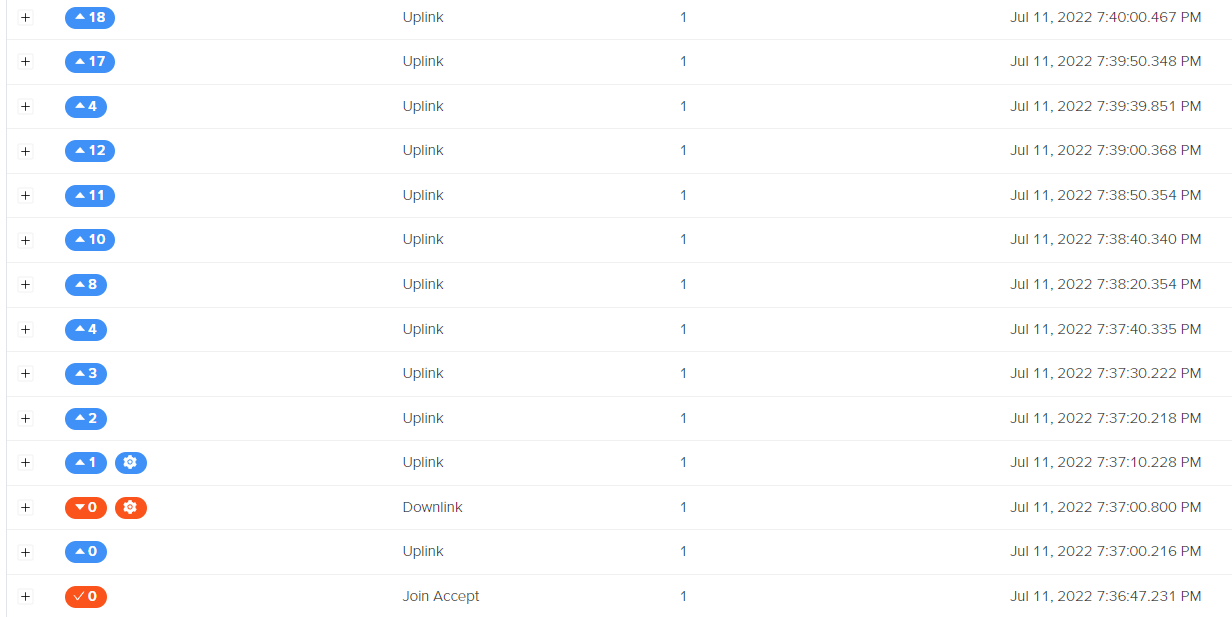
You can see more information about the transmission
But we cannot see the payload.
We need to make an integration so we can manage the payload.
13
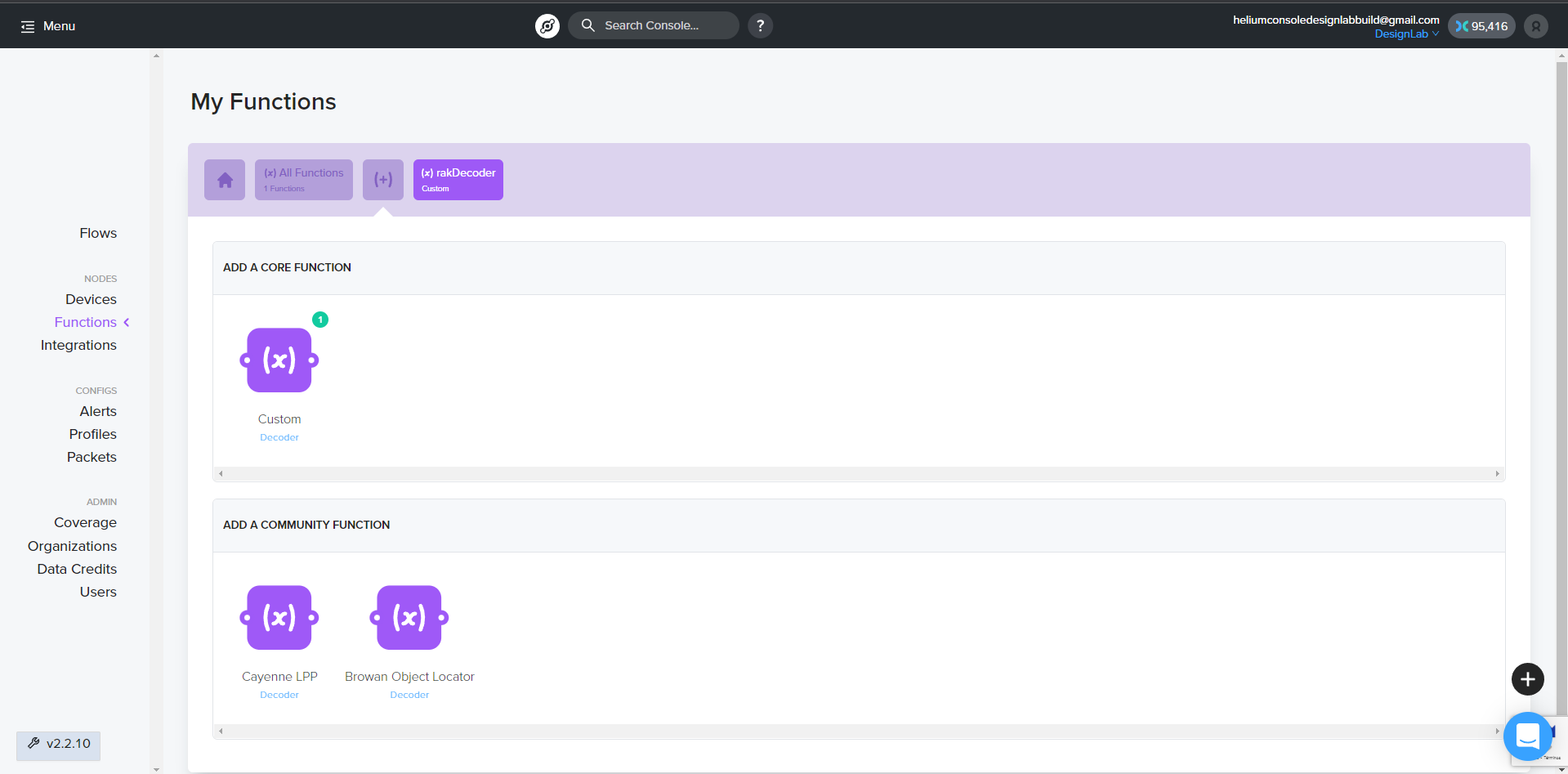
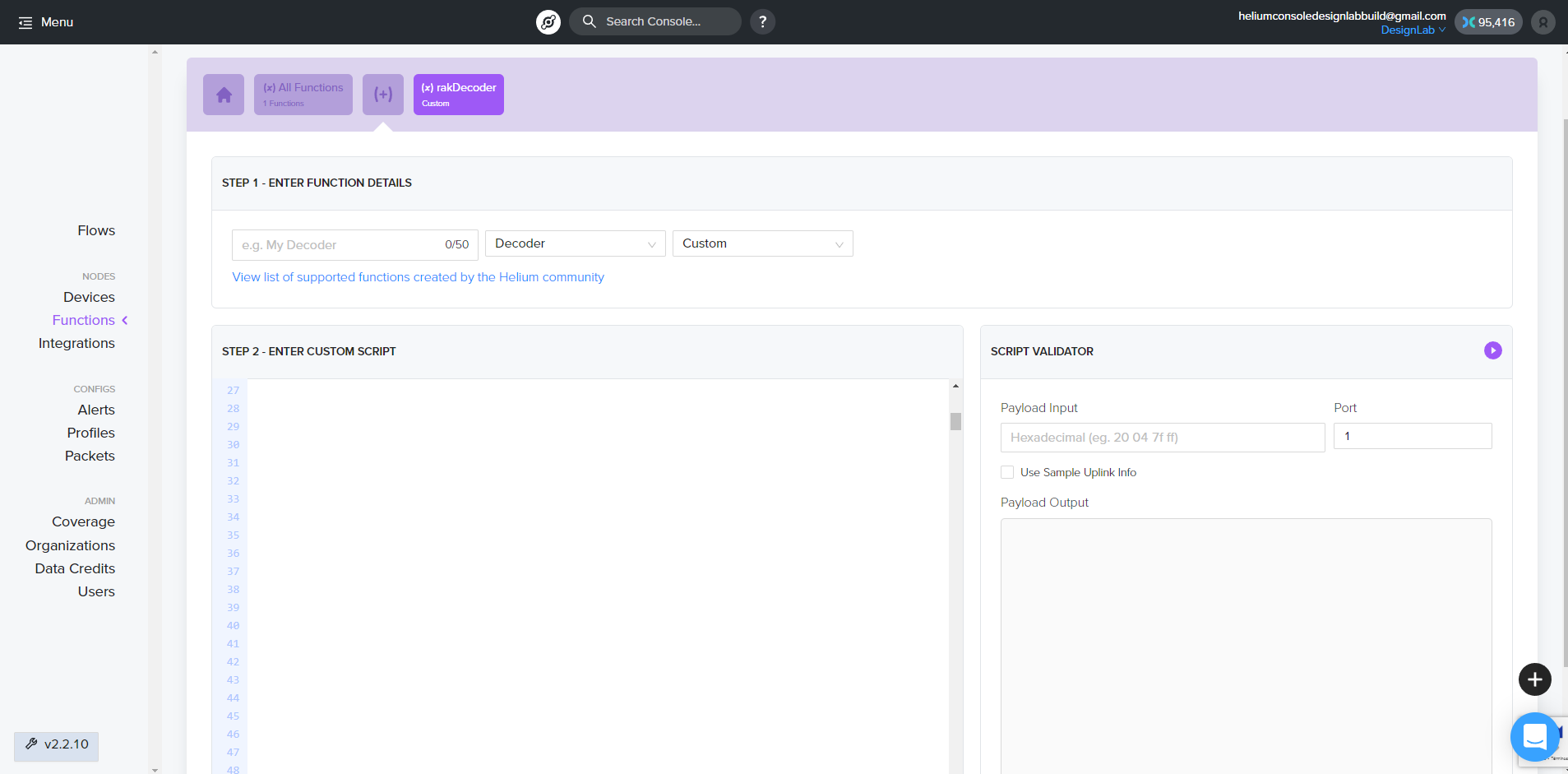
Create a function to decode the payload
In order to decode the 23 bytes of payload that the sensor is sending we need to implement a decoder, in this case we need to create one custom.
Once you select to create a custom decoder you just simply copy and paste the next code which is written on Javascript, this function will decode the specific payload of our device and then will let us to have all the information we want, on a JSON format.
/**
* @referencehttps://github.com/myDevicesIoT/cayenne-docs/blob/master/docs/LORA.md
* @referencehttp://openmobilealliance.org/wp/OMNA/LwM2M/LwM2MRegistry.html#extlabel
*
* Adapted for lora-app-server from https://gist.github.com/iPAS/e24970a91463a4a8177f9806d1ef14b8
*
* Type IPSO LPP Hex Data Size Data Resolution per bit
* Digital Input 3200 0 0 1 1
* Digital Output 3201 1 1 1 1
* Analog Input 3202 2 2 2 0.01 Signed
* Analog Output 3203 3 3 2 0.01 Signed
* Illuminance Sensor 3301 101 65 2 1 Lux Unsigned MSB
* Presence Sensor 3302 102 66 1 1
* Temperature Sensor 3303 103 67 2 0.1 °C Signed MSB
* Humidity Sensor 3304 104 68 1 0.5 % Unsigned
* Accelerometer 3313 113 71 6 0.001 G Signed MSB per axis
* Barometer 3315 115 73 2 0.1 hPa Unsigned MSB
* Time 3333 133 85 4 Unix time MSB
* Gyrometer 3334 134 86 6 0.01 °/s Signed MSB per axis
* GPS Location 3336 136 88 9 Latitude : 0.0001 ° Signed MSB
* Longitude : 0.0001 ° Signed MSB
* Altitude : 0.01 meter Signed MSB
*
* Additional types
* Generic Sensor 3300 100 64 4 Unsigned integer MSB
* Voltage 3316 116 74 2 0.01 V Unsigned MSB
* Current 3317 117 75 2 0.001 A Unsigned MSB
* Frequency 3318 118 76 4 1 Hz Unsigned MSB
* Percentage 3320 120 78 1 1% Unsigned
* Altitude 3321 121 79 2 1m Signed MSB
* Concentration 3325 125 7D 2 1 PPM unsigned : 1pmm = 1 * 10 ^-6 = 0.000 001
* Power 3328 128 80 2 1 W Unsigned MSB
* Distance 3330 130 82 4 0.001m Unsigned MSB
* Energy 3331 131 83 4 0.001kWh Unsigned MSB
* Colour 3335 135 87 3 R: 255 G: 255 B: 255
* Direction 3332 132 84 2 1º Unsigned MSB
* Switch 3342 142 8E 1 0/1
* GPS Location 3337 137 89 11 Latitude : 0.000001 ° Signed MSB
* Longitude : 0.000001 ° Signed MSB
* Altitude : 0.01 meter Signed MSB
* VOC index 3338 138 8A 1 VOC index
*
*/// lppDecode decodes an array of bytes into an array of ojects, // each one with the channel, the data type and the value.functionlppDecode(bytes){
var sensor_types = {
0: { 'size': 1, 'name': 'digital_in', 'signed': false, 'divisor': 1 },
1: { 'size': 1, 'name': 'digital_out', 'signed': false, 'divisor': 1 },
2: { 'size': 2, 'name': 'analog_in', 'signed': true, 'divisor': 100 },
3: { 'size': 2, 'name': 'analog_out', 'signed': true, 'divisor': 100 },
100: { 'size': 4, 'name': 'generic', 'signed': false, 'divisor': 1 },
101: { 'size': 2, 'name': 'illuminance', 'signed': false, 'divisor': 1 },
102: { 'size': 1, 'name': 'presence', 'signed': false, 'divisor': 1 },
103: { 'size': 2, 'name': 'temperature', 'signed': true, 'divisor': 10 },
104: { 'size': 1, 'name': 'humidity', 'signed': false, 'divisor': 2 },
113: { 'size': 6, 'name': 'accelerometer', 'signed': true, 'divisor': 1000 },
115: { 'size': 2, 'name': 'barometer', 'signed': false, 'divisor': 10 },
116: { 'size': 2, 'name': 'voltage', 'signed': false, 'divisor': 100 },
117: { 'size': 2, 'name': 'current', 'signed': false, 'divisor': 1000 },
118: { 'size': 4, 'name': 'frequency', 'signed': false, 'divisor': 1 },
120: { 'size': 1, 'name': 'percentage', 'signed': false, 'divisor': 1 },
121: { 'size': 2, 'name': 'altitude', 'signed': true, 'divisor': 1 },
125: { 'size': 2, 'name': 'concentration', 'signed': false, 'divisor': 1 },
128: { 'size': 2, 'name': 'power', 'signed': false, 'divisor': 1 },
130: { 'size': 4, 'name': 'distance', 'signed': false, 'divisor': 1000 },
131: { 'size': 4, 'name': 'energy', 'signed': false, 'divisor': 1000 },
132: { 'size': 2, 'name': 'direction', 'signed': false, 'divisor': 1 },
133: { 'size': 4, 'name': 'time', 'signed': false, 'divisor': 1 },
134: { 'size': 6, 'name': 'gyrometer', 'signed': true, 'divisor': 100 },
135: { 'size': 3, 'name': 'colour', 'signed': false, 'divisor': 1 },
136: { 'size': 9, 'name': 'gps', 'signed': true, 'divisor': [10000, 10000, 100] },
137: { 'size': 11, 'name': 'gps', 'signed': true, 'divisor': [1000000, 1000000, 100] },
138: { 'size': 2, 'name': 'voc', 'signed': false, 'divisor': 1 },
142: { 'size': 1, 'name': 'switch', 'signed': false, 'divisor': 1 },
};
functionarrayToDecimal(stream, is_signed, divisor){
var value = 0;
for (var i = 0; i < stream.length; i++) {
if (stream[i] > 0xFF)
throw'Byte value overflow!';
value = (value << 8) | stream[i];
}
if (is_signed) {
var edge = 1 << (stream.length) * 8; // 0x1000..var max = (edge - 1) >> 1; // 0x0FFF.. >> 1
value = (value > max) ? value - edge : value;
}
value /= divisor;
return value;
}
var sensors = [];
var i = 0;
while (i < bytes.length) {
var s_no = bytes[i++];
var s_type = bytes[i++];
if (typeof sensor_types[s_type] == 'undefined') {
throw'Sensor type error!: ' + s_type;
}
var s_value = 0;
var type = sensor_types[s_type];
switch (s_type) {
case113: // Accelerometercase134: // Gyrometer
s_value = {
'x': arrayToDecimal(bytes.slice(i + 0, i + 2), type.signed, type.divisor),
'y': arrayToDecimal(bytes.slice(i + 2, i + 4), type.signed, type.divisor),
'z': arrayToDecimal(bytes.slice(i + 4, i + 6), type.signed, type.divisor)
};
break;
case136: // GPS Location
s_value = {
'latitude': arrayToDecimal(bytes.slice(i + 0, i + 3), type.signed, type.divisor[0]),
'longitude': arrayToDecimal(bytes.slice(i + 3, i + 6), type.signed, type.divisor[1]),
'altitude': arrayToDecimal(bytes.slice(i + 6, i + 9), type.signed, type.divisor[2])
};
break;
case137: // Precise GPS Location
s_value = {
'latitude': arrayToDecimal(bytes.slice(i + 0, i + 4), type.signed, type.divisor[0]),
'longitude': arrayToDecimal(bytes.slice(i + 4, i + 8), type.signed, type.divisor[1]),
'altitude': arrayToDecimal(bytes.slice(i + 8, i + 11), type.signed, type.divisor[2])
};
break;
case135: // Colour
s_value = {
'r': arrayToDecimal(bytes.slice(i + 0, i + 1), type.signed, type.divisor),
'g': arrayToDecimal(bytes.slice(i + 1, i + 2), type.signed, type.divisor),
'b': arrayToDecimal(bytes.slice(i + 2, i + 3), type.signed, type.divisor)
};
break;
default: // All the rest
s_value = arrayToDecimal(bytes.slice(i, i + type.size), type.signed, type.divisor);
break;
}
sensors.push({
'channel': s_no,
'type': s_type,
'name': type.name,
'value': s_value
});
i += type.size;
}
return sensors;
}
// To use with ChirpstackfunctionDecode(fPort, bytes, variables){
// flat output (like original decoder):var response = {};
lppDecode(bytes, 1).forEach(function(field){
response[field['name'] + '_' + field['channel']] = field['value'];
});
return { data: response };
// field output//return {'fields': lppDecode(bytes, fPort)};
}
// To use with HeliumfunctionDecoder(bytes, port, uplink_info){
// flat output (like original decoder):var response = {};
lppDecode(bytes, 1).forEach(function(field){
response[field['name'] + '_' + field['channel']] = field['value'];
});
return { data: response };
}
14
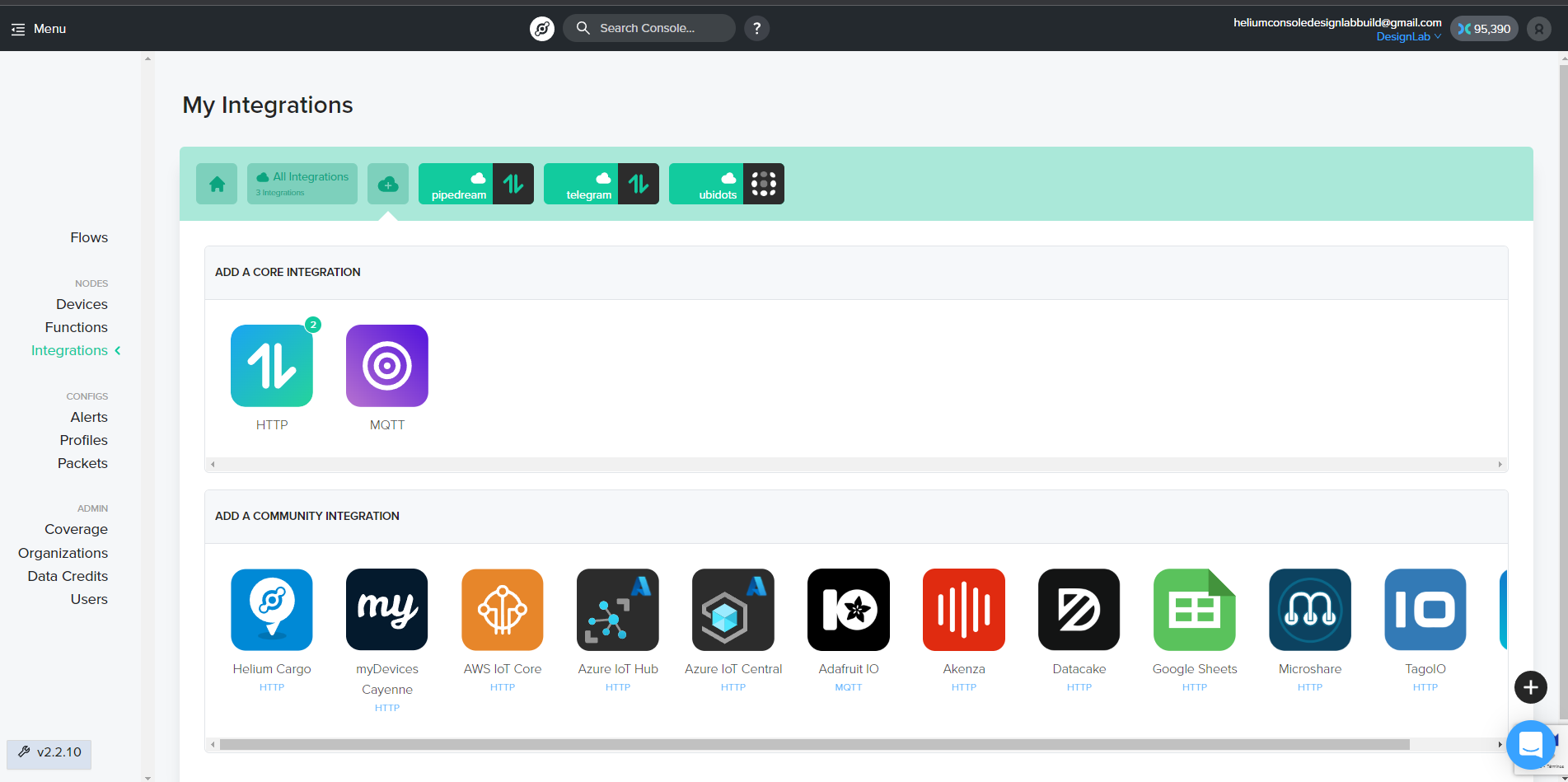
Create an integration
In this project we want the information that we generated from our node to be analize and then reported by a Telegram Bot then it will let us know if the values of the sensor are bad for humans or otherwise is it safe to walk arround.
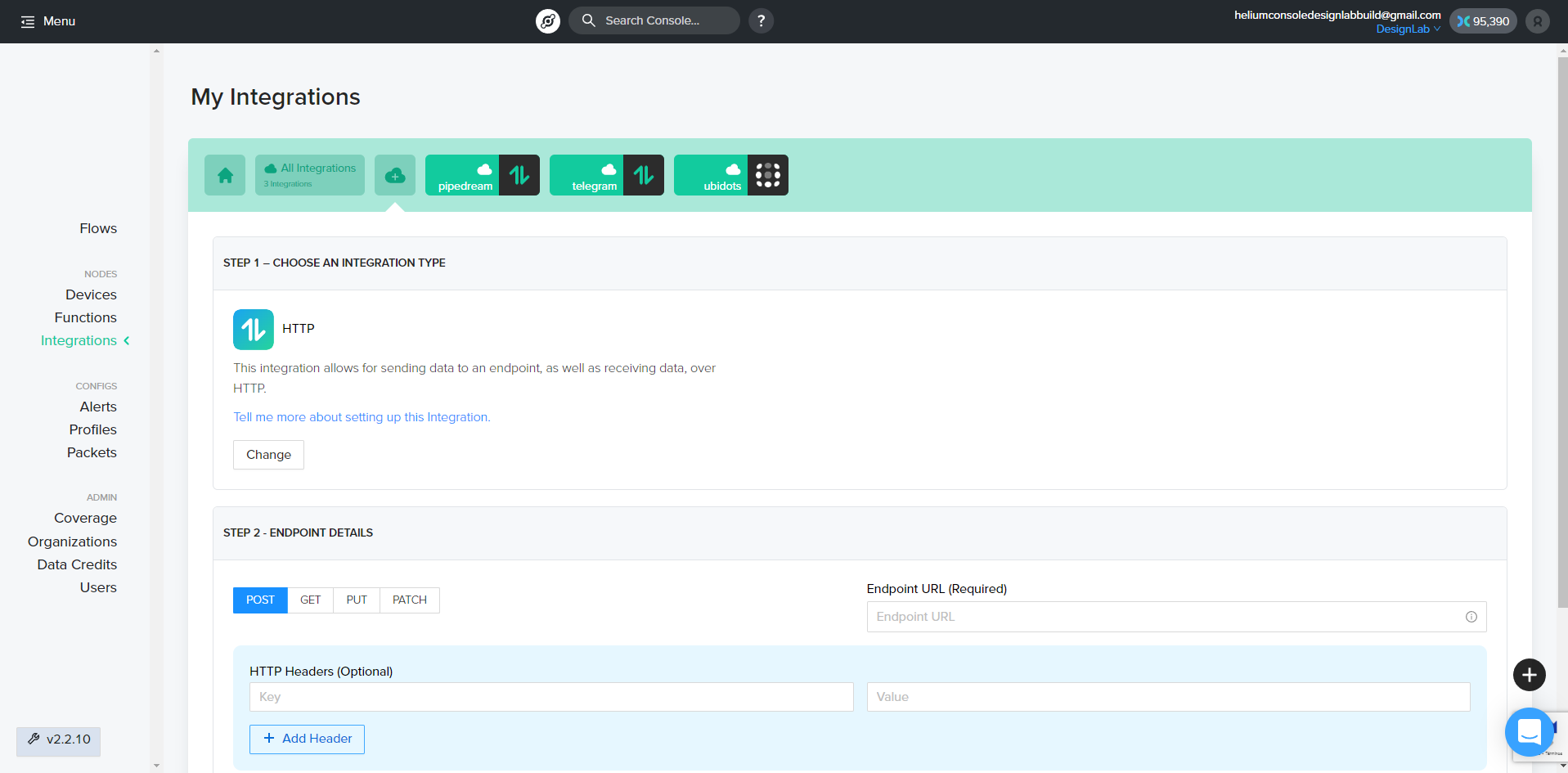
Create an HTTP integration then:
Select what kind of integration do you need, in this case we're gonna be using the HTTP POST for our endpoint.
Here the endpoint URL will be given by the leader of the workshop so you can connect and feed the BOT.
15
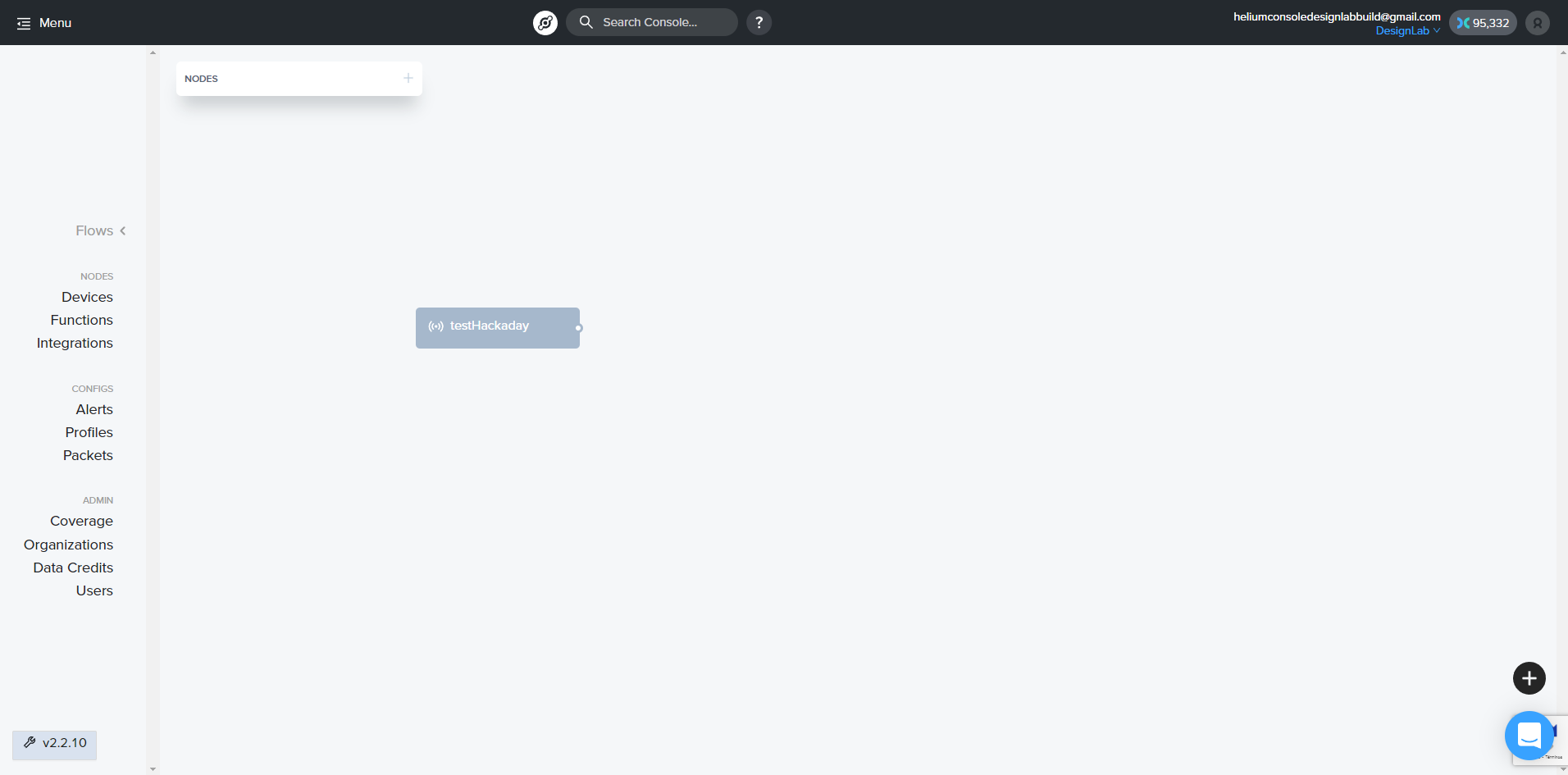
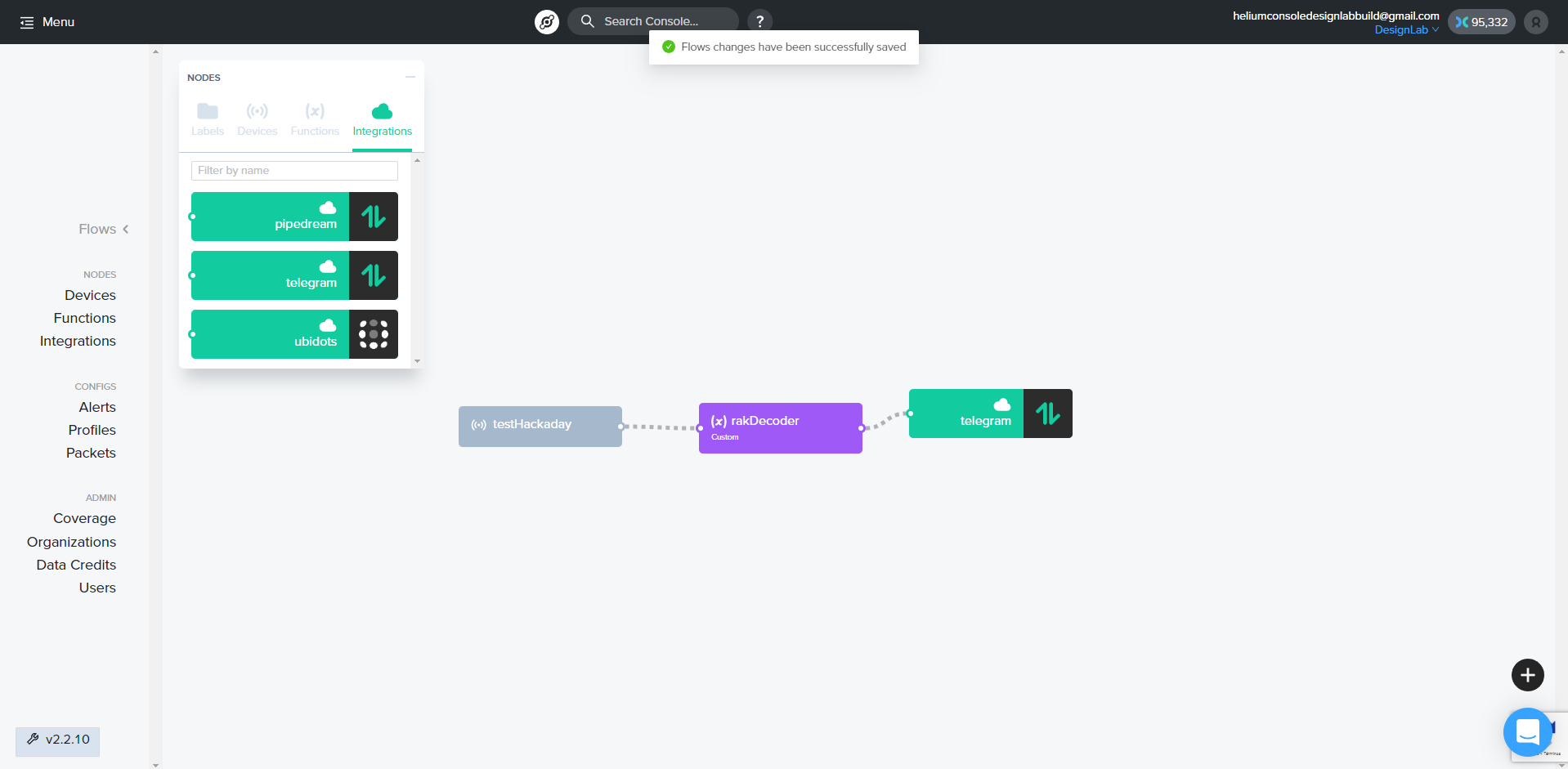
Flows
Now you have created the device, then the function and the integration, now is time to connect them, to do so you need to go to the FLOWS section
If you click where the text says "Nodes" you'll find
Labels, Devices, Functions and integrations, you can select each one and drag it into the canvas.
Now that you have all 3 parts on the canvas you should be able to connect them and then save it.
Now you have the pipes to be feeding the telegram bot or well if you prefered otherwise another API.
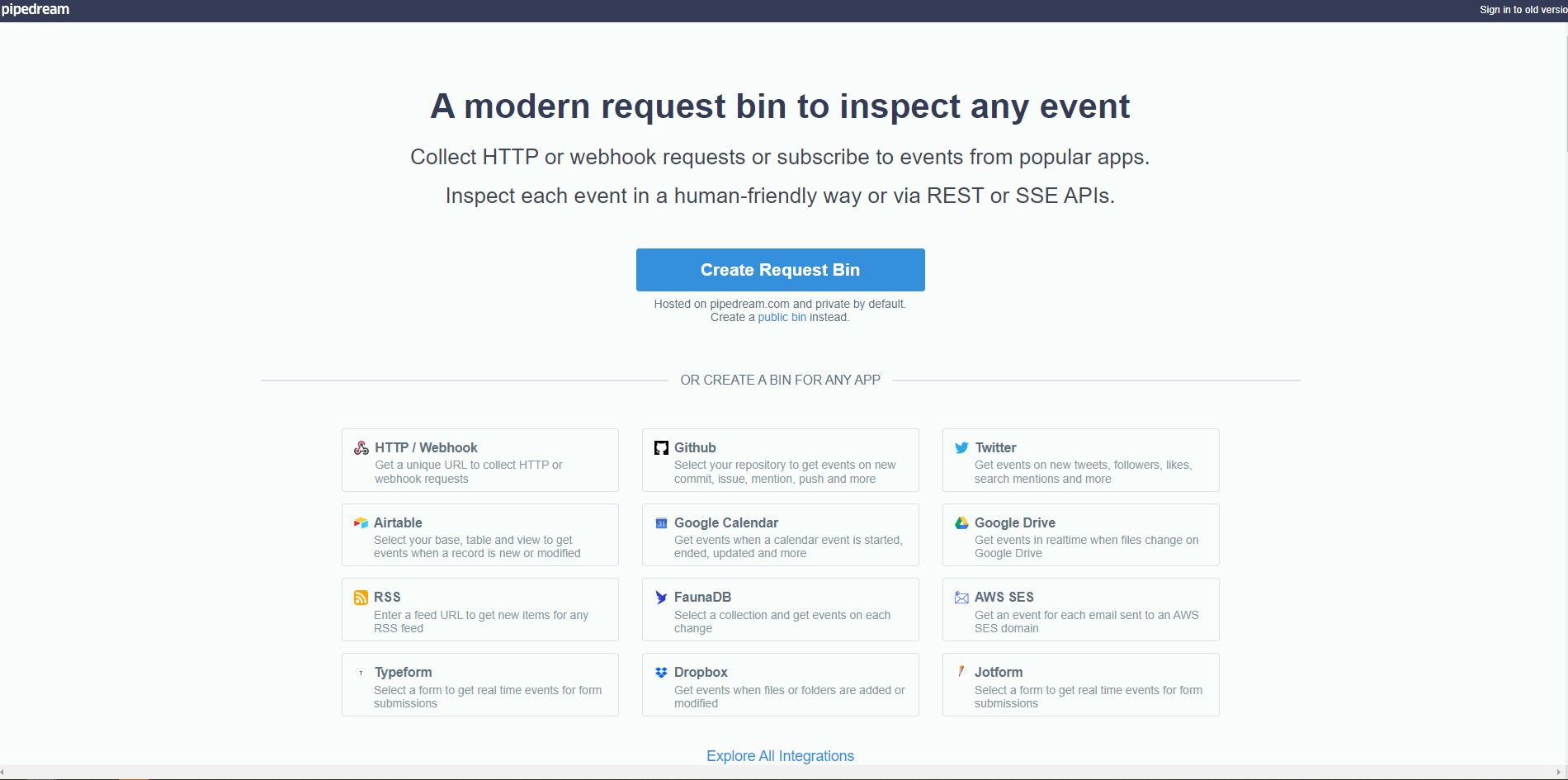
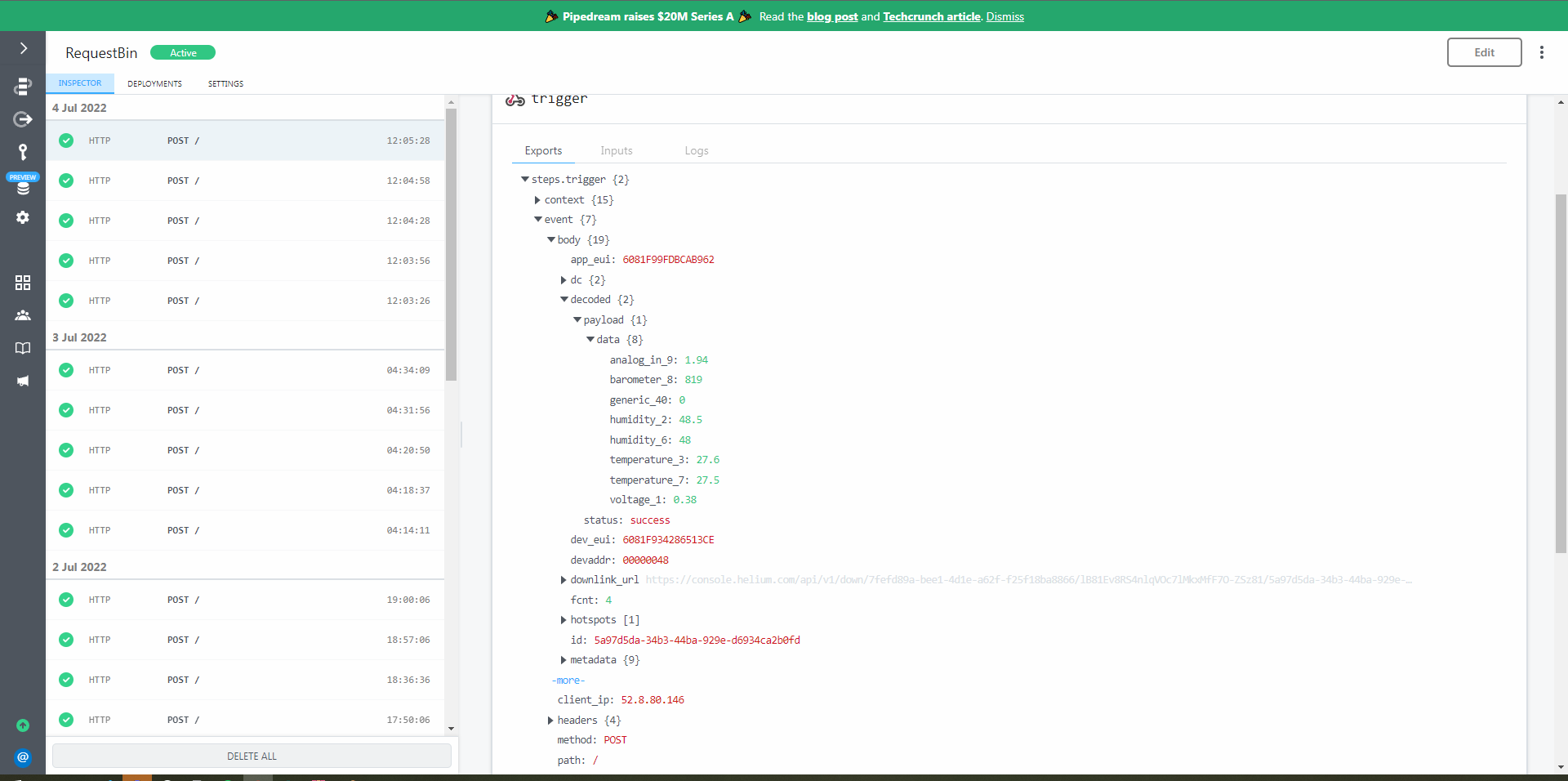
If you want to debug what JSON has gone from the decoder, to Telegram you can create another integration pointing to a requestBin, this webpage allows you to create an endpoint and see all the HTTP messages you may receive.
Here is an example of what can be read on a POST from HELIUM
16
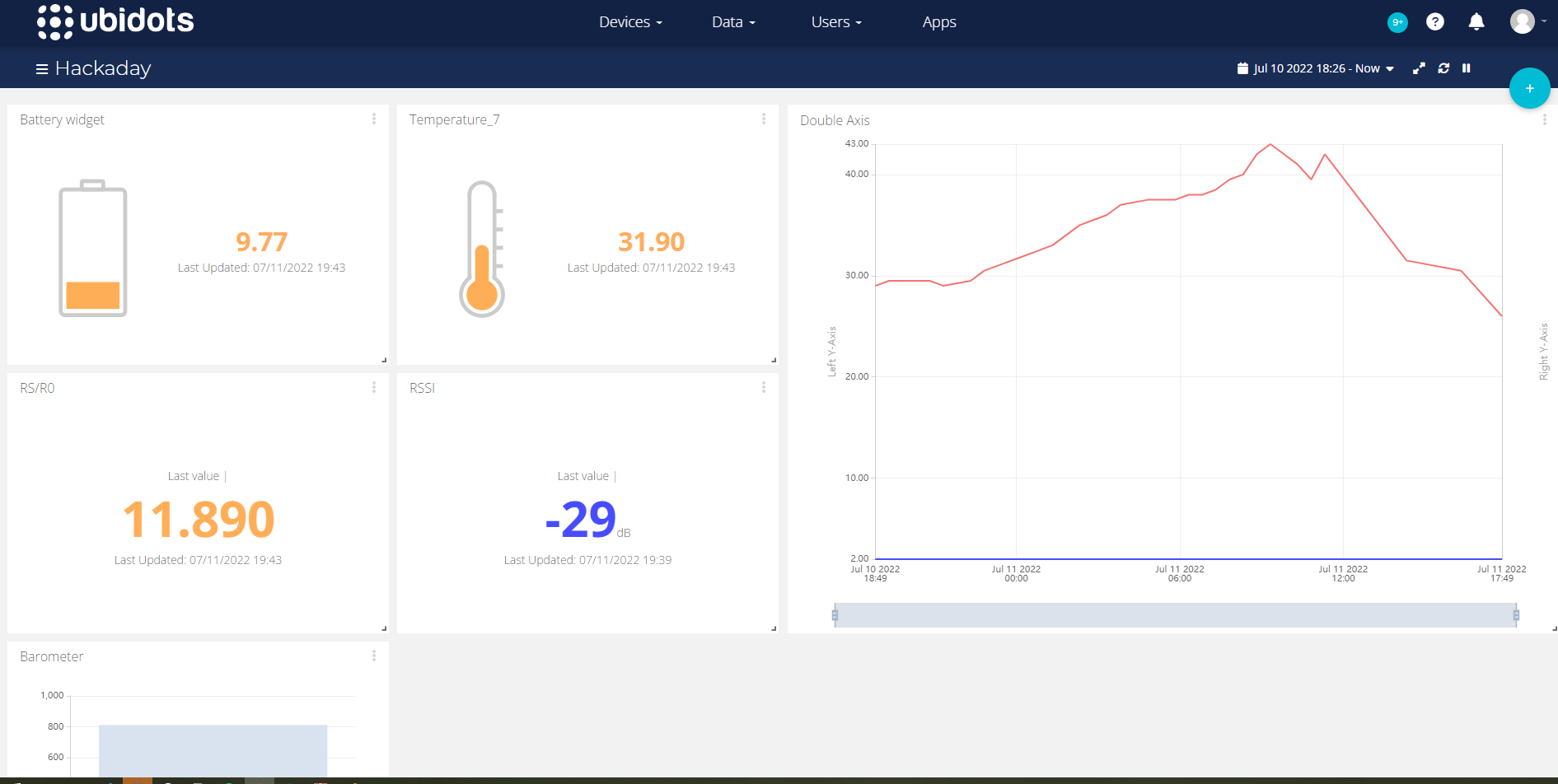
Other possible integration
If you want to explore more about the node information you can follow this guide to connect Helium with Ubidots and then be able to create nice dashboards in a really short time.
 Supplyframe DesignLab
Supplyframe DesignLab

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.