 kelvinA
kelvinA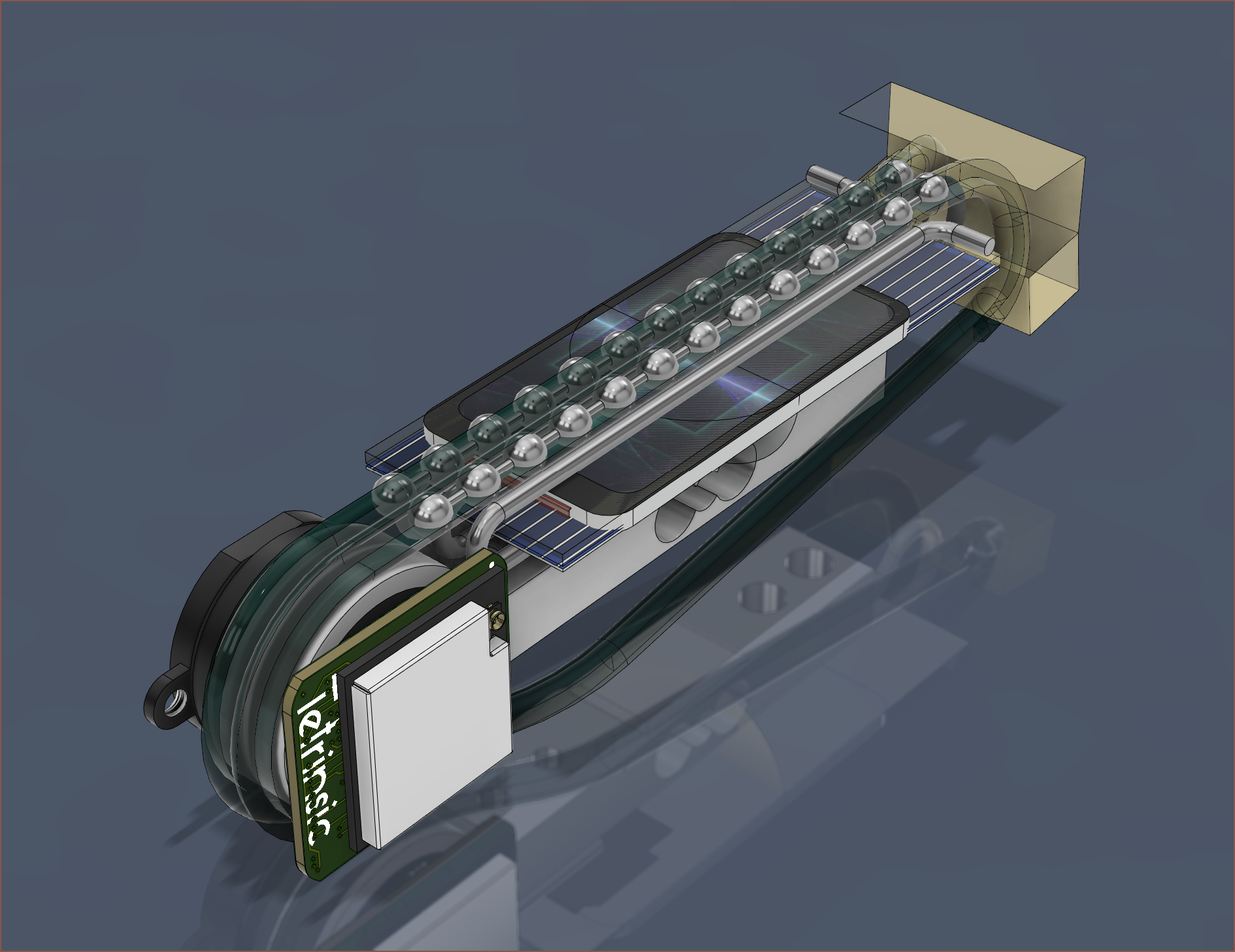
So you might be wondering why everything looks completely different now.
Electronics
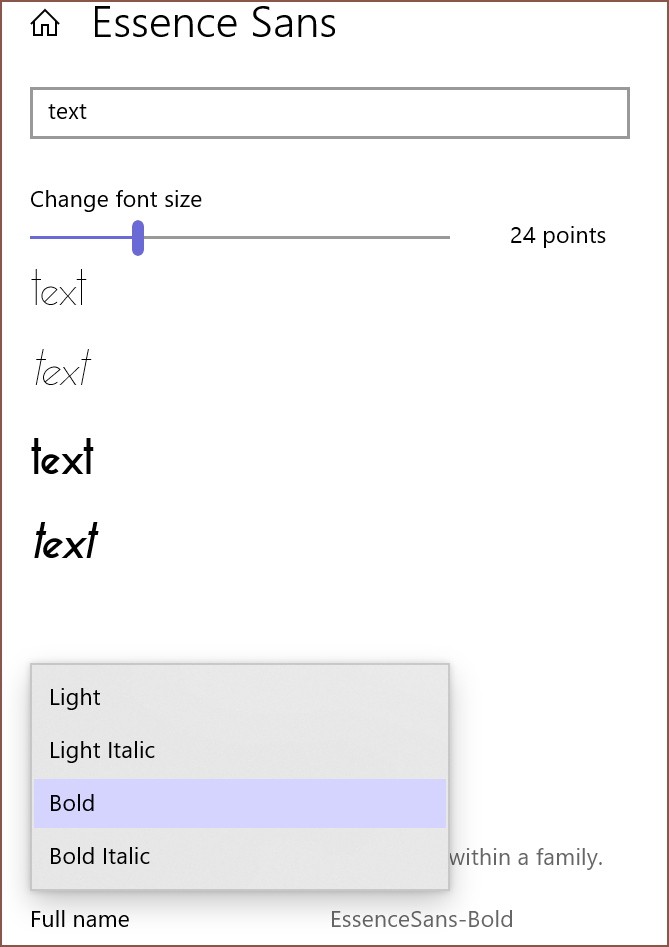
Well it started when I deleted the regular weight of Essence Sans specifically so that Fusion 360 would give me the bold version:
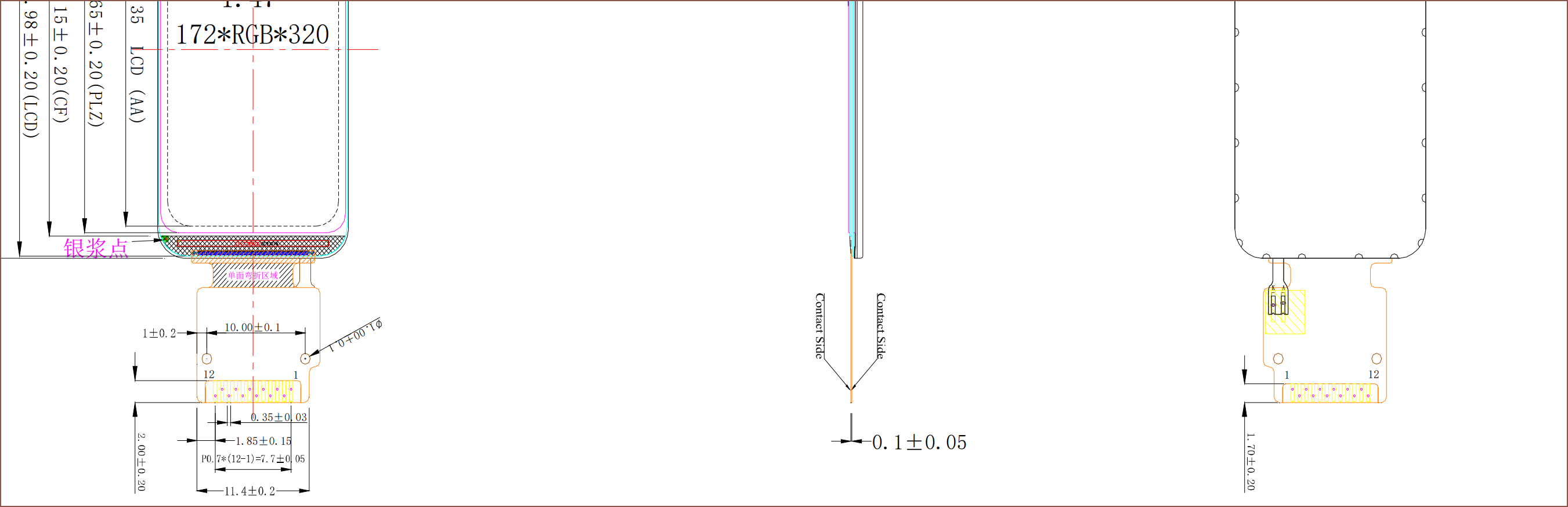
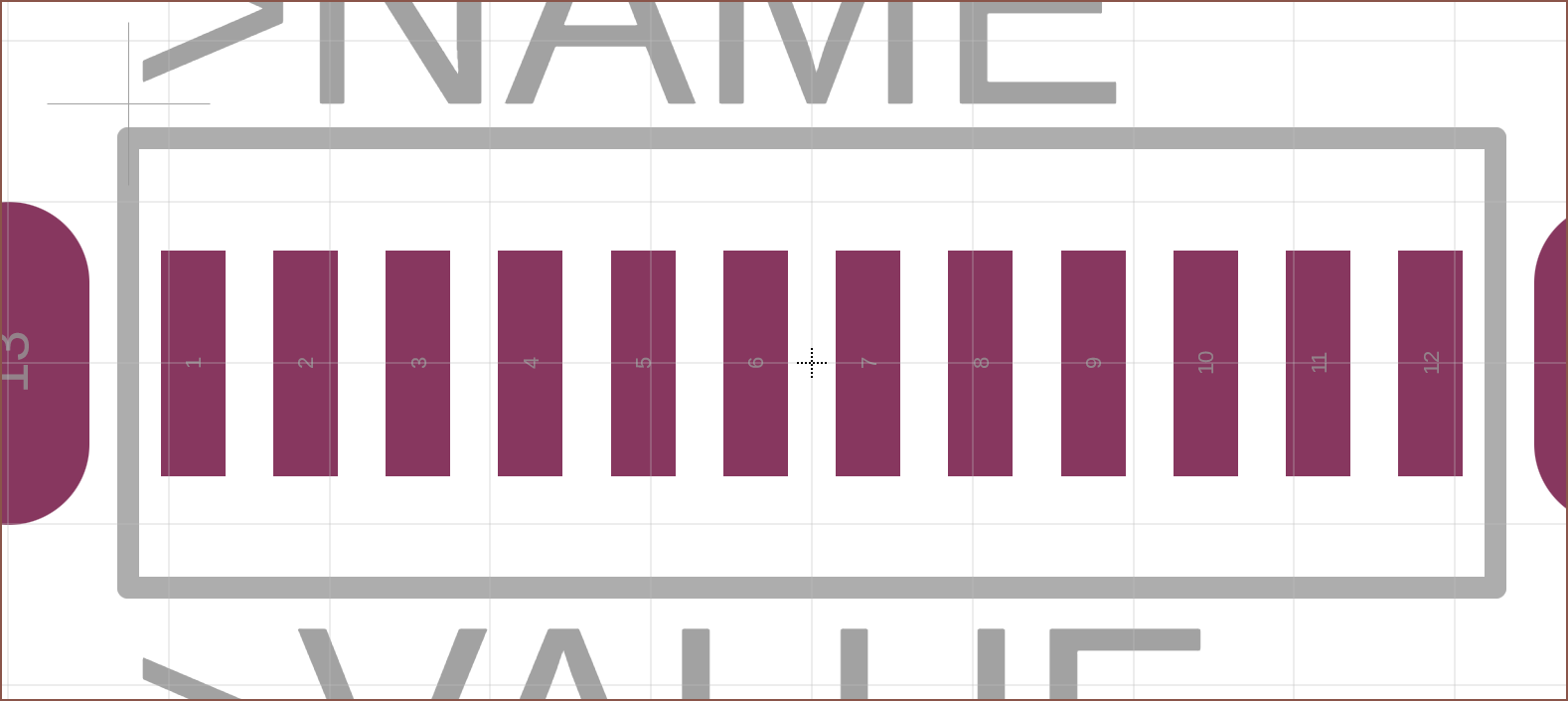
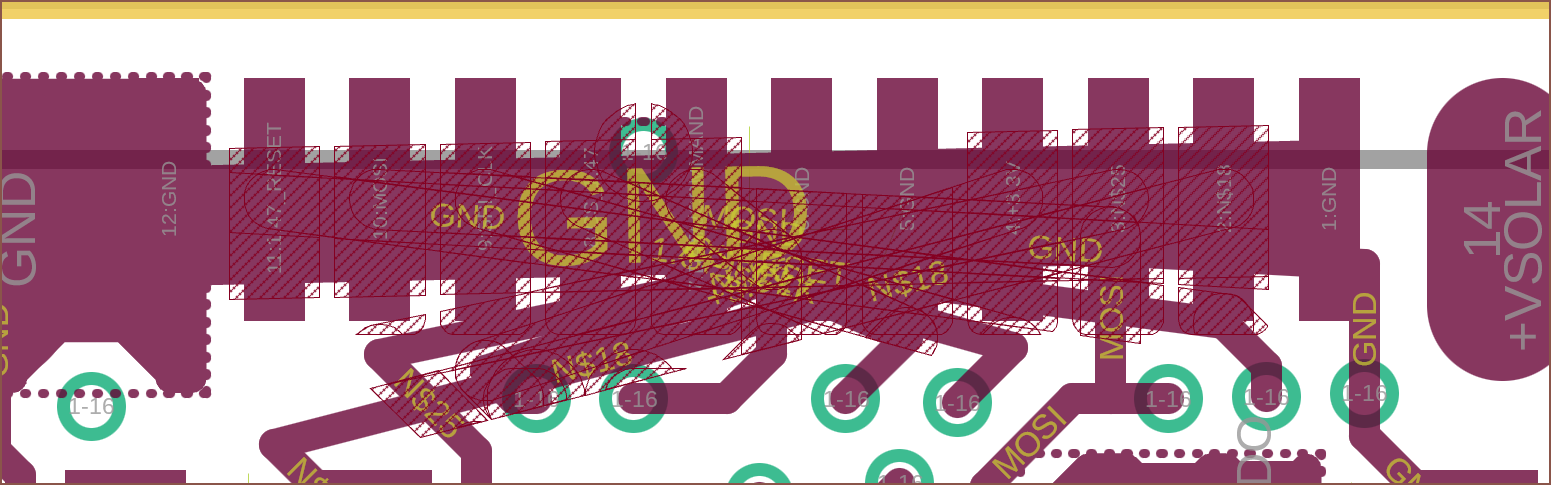
Then I realised that, from the front of the LCD, the pinout is 12 - 1 not 1 - 12:
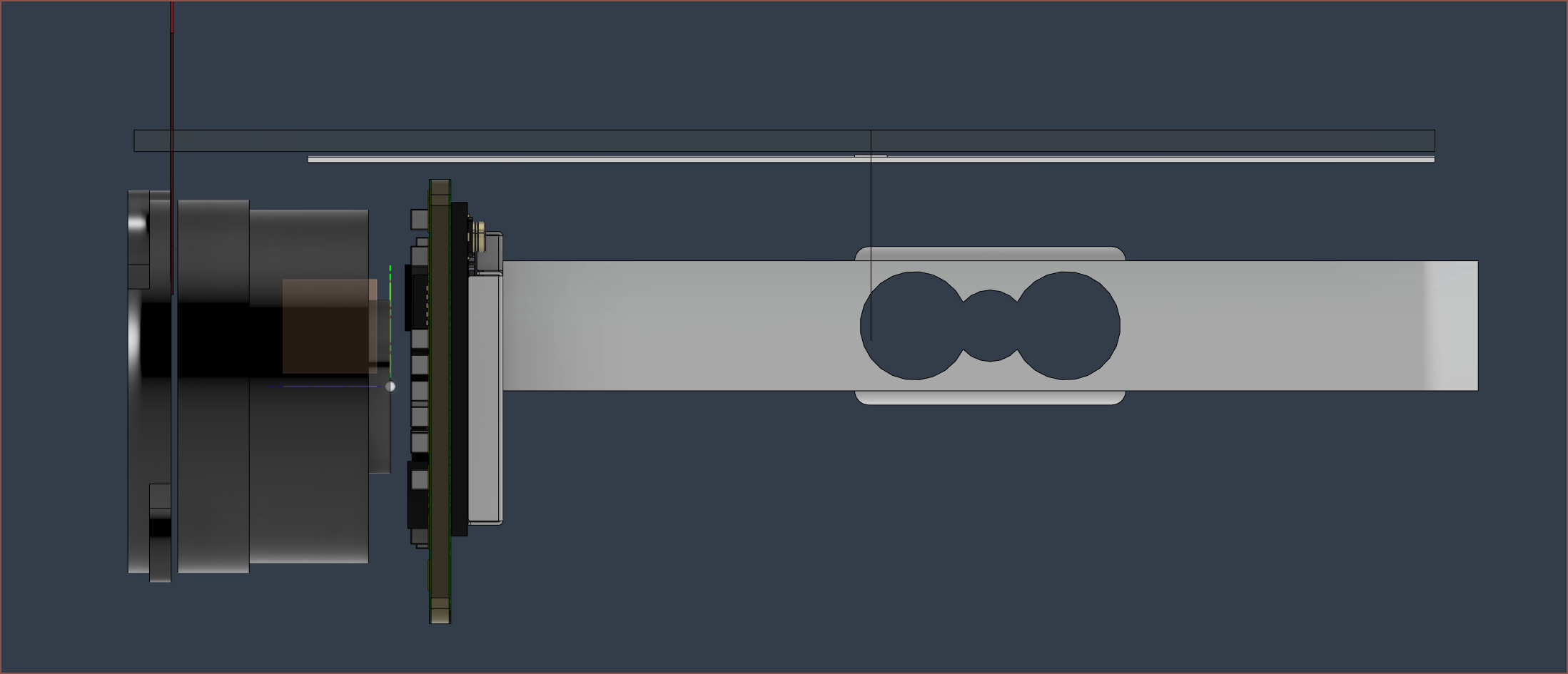
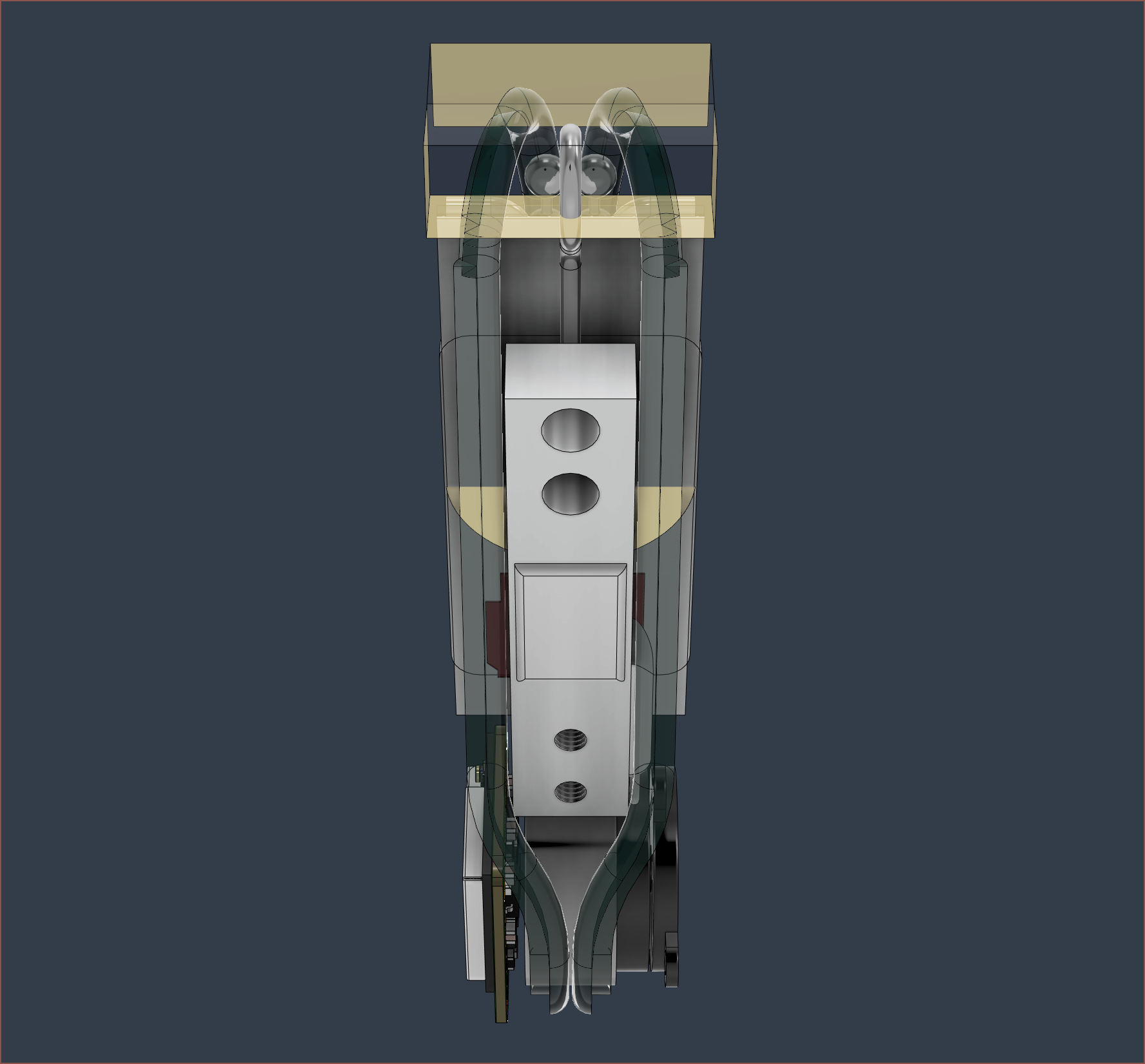
I wasn't going to be fixing that, so instead I thought of another idea, which is flipping the motor-PCB sandwich around:
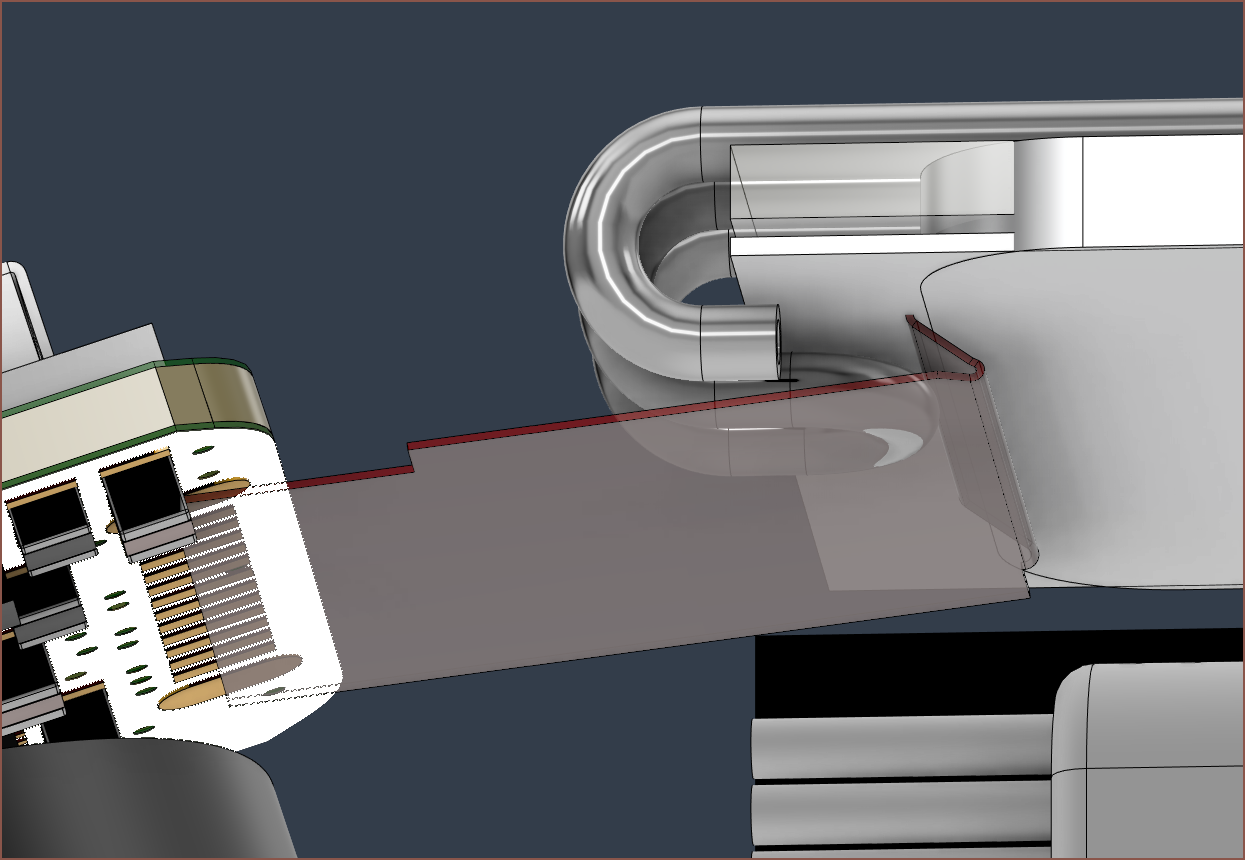
It was a good strat which could eliminate the need for the extension cable, until I realised that there wouldn't be a way for the ball-chain to reach the pulley.
New orientation ideas
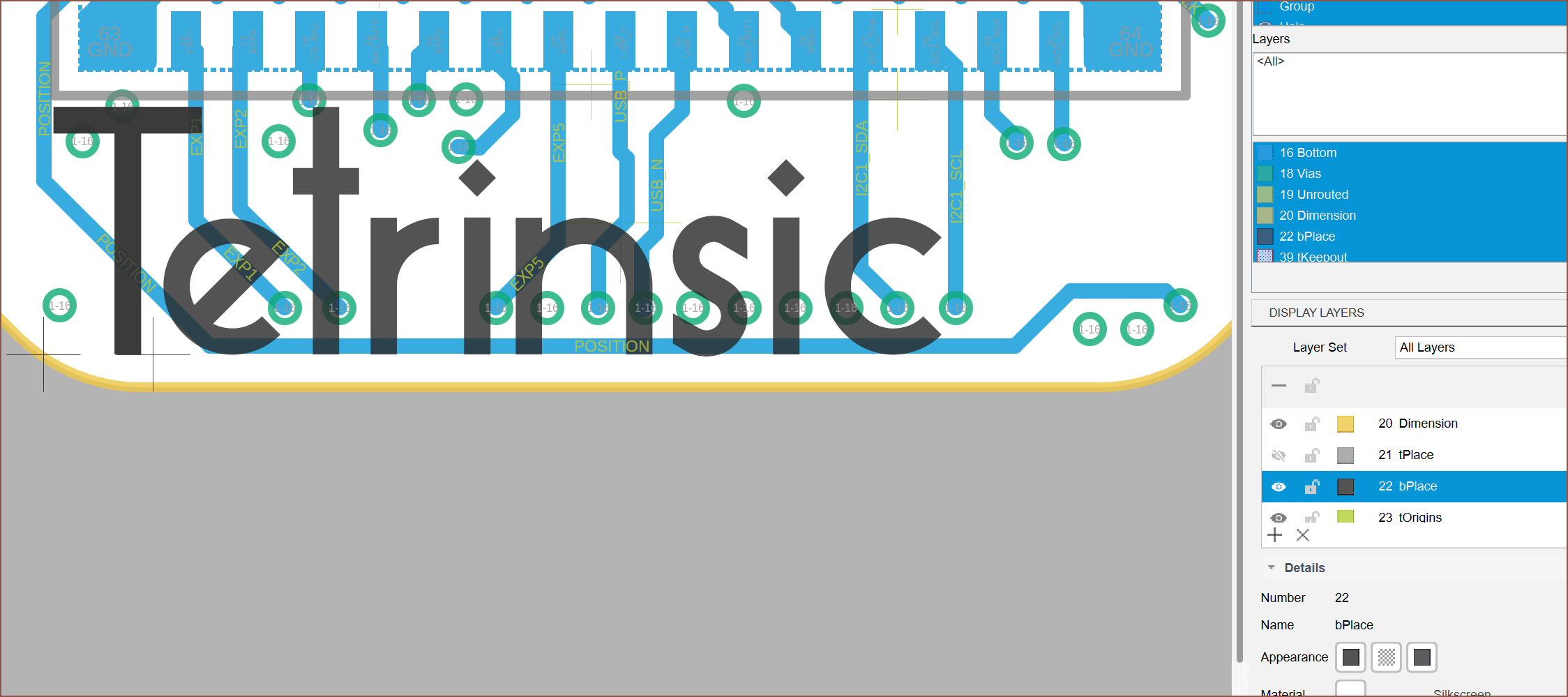
I then started looking into some new orientation ideas, since I made the PCB smaller than expected, as well as self-contained:
This was really an attempt to reduce the size of Tetrinsic, but it wasn't working so I thought that I should increase the sliding area : footprint ratio.
Well I saw this and thought that if I had space to do this, I had space for the ball-chain to just go around the motor entirely.
The above is my first idea, where the ball chain will slide to the side of the load cell. The below is an idea to get around the mounting screws such that I could still connect multiple Tetrinsics in a row on a printed bar, but the bends were too shallow.
This was also the moment that I upgraded to 3.2mm balls, since that's the smallest that has a splicing tool, and I'm thinking that the larger the ball, the easier it may be to actually do the splice manually / with a 3D printed tool.
I started making some 1.5mm stainless steel bends:
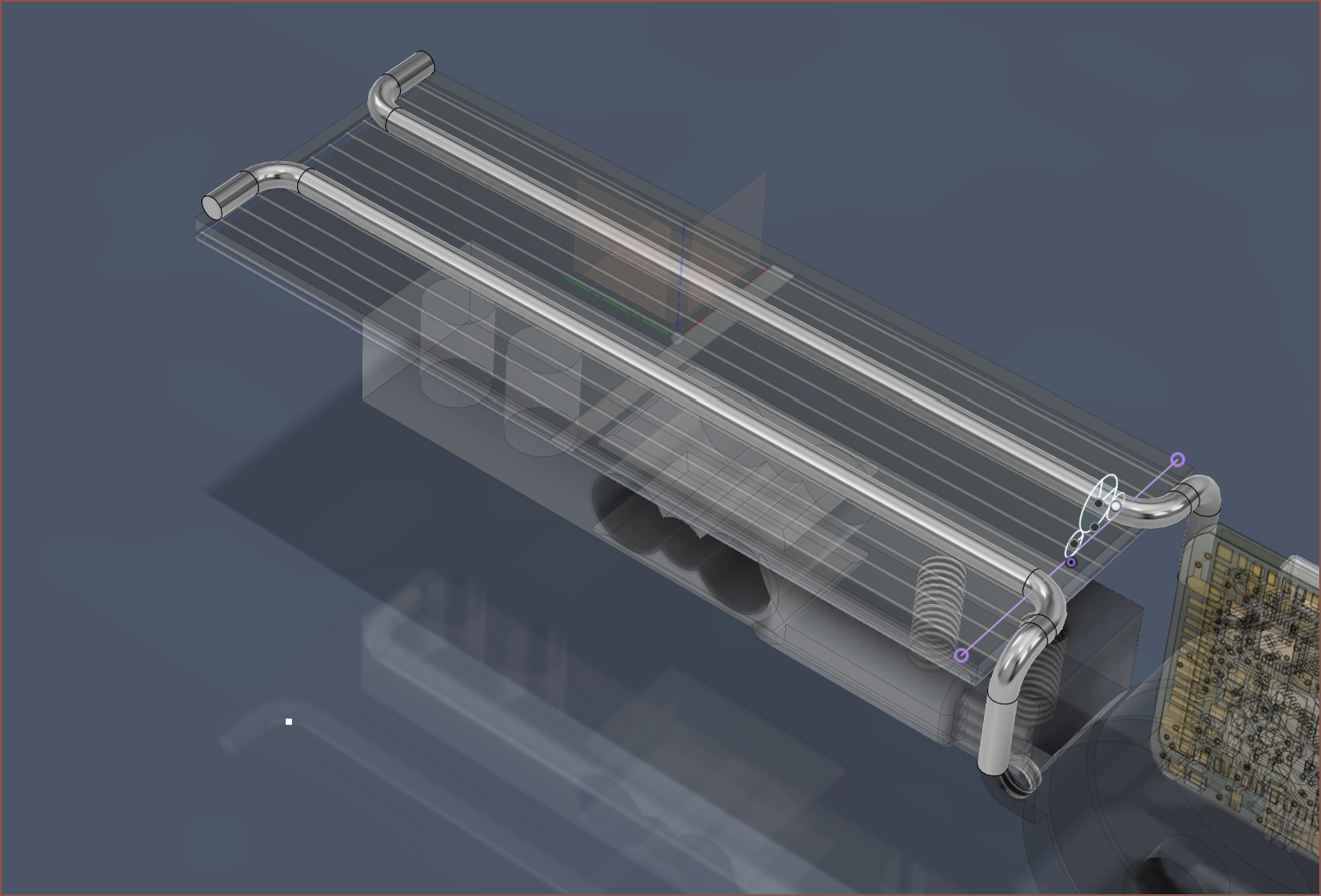
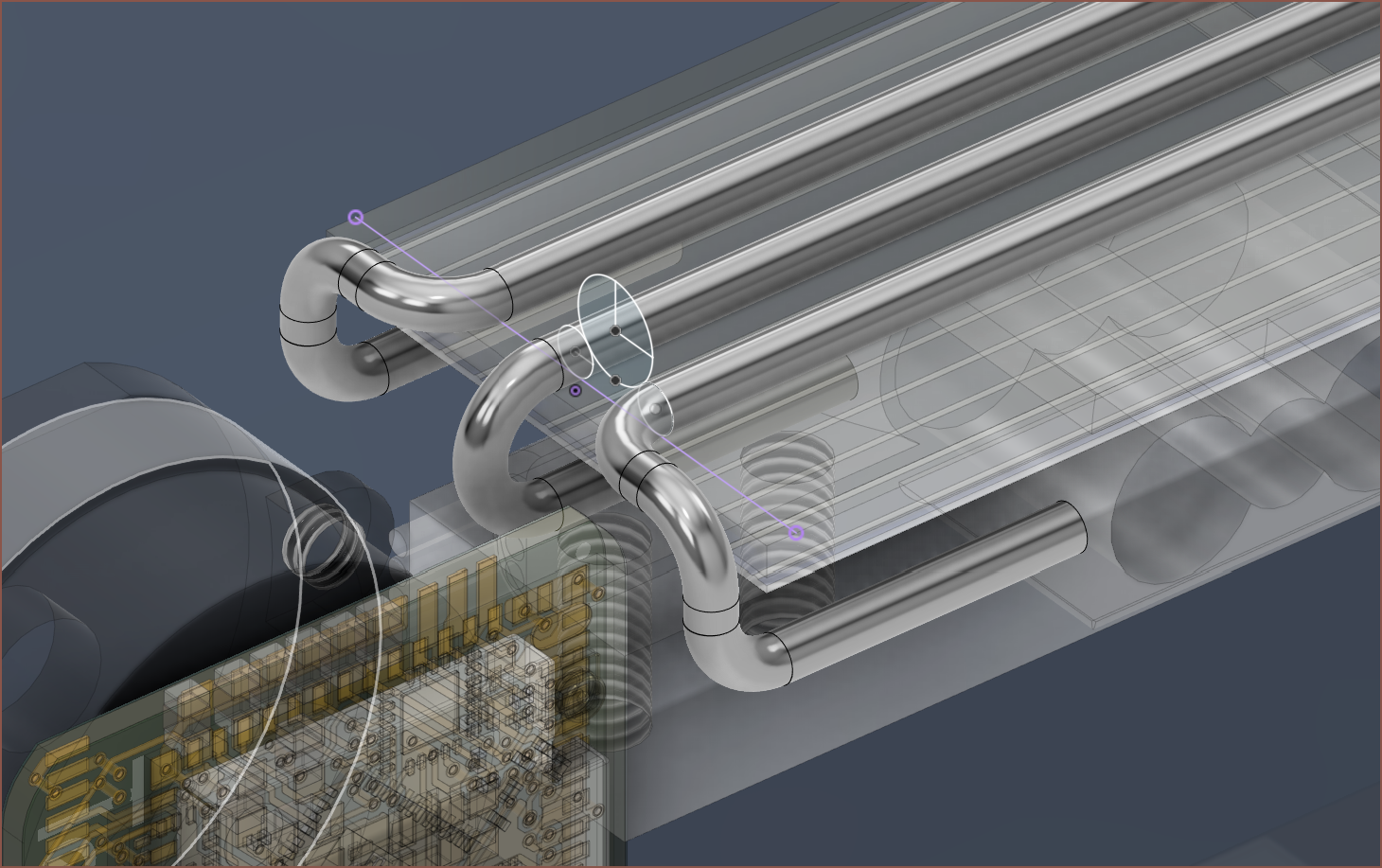
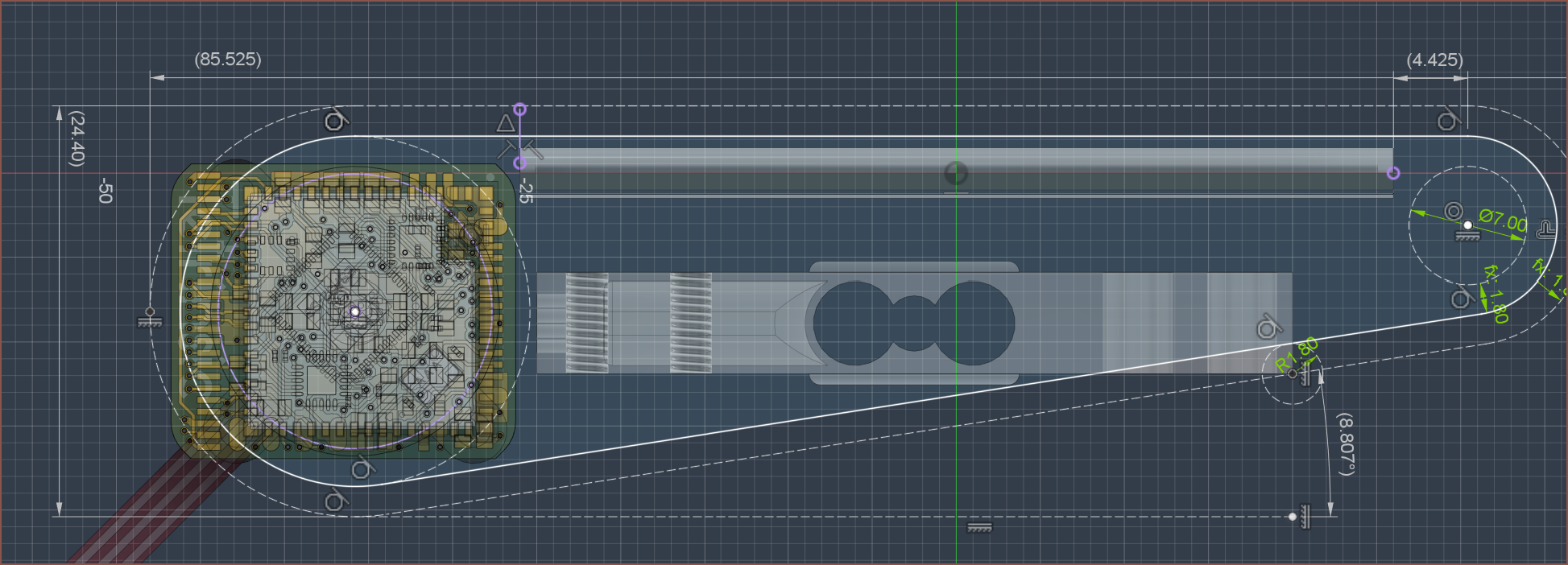
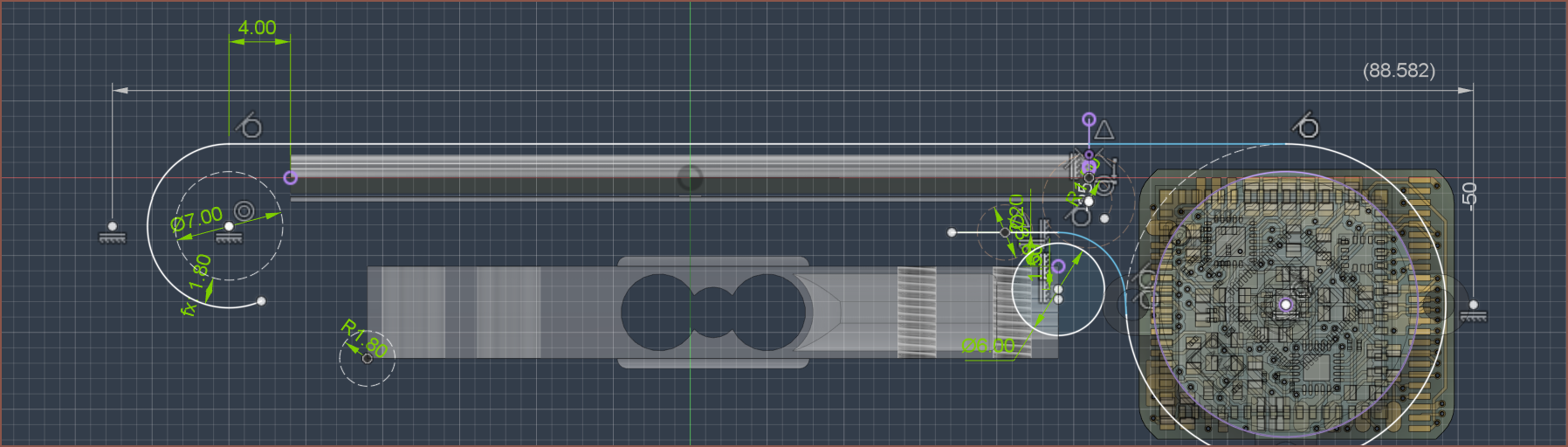
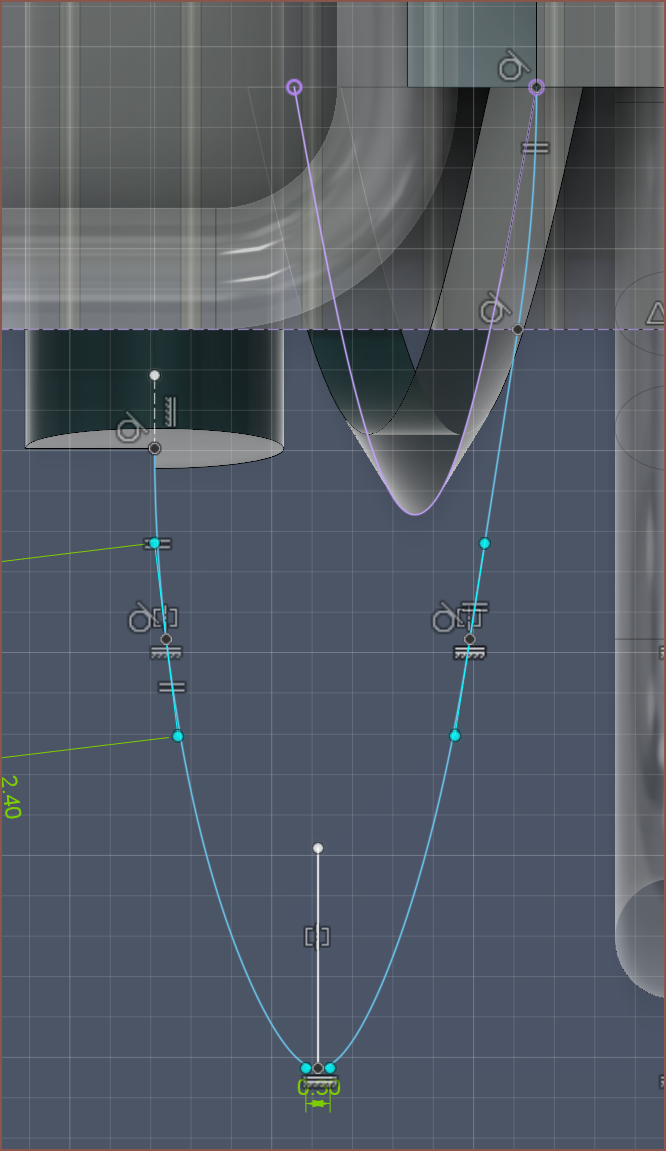
Then I was making the chain pathway.
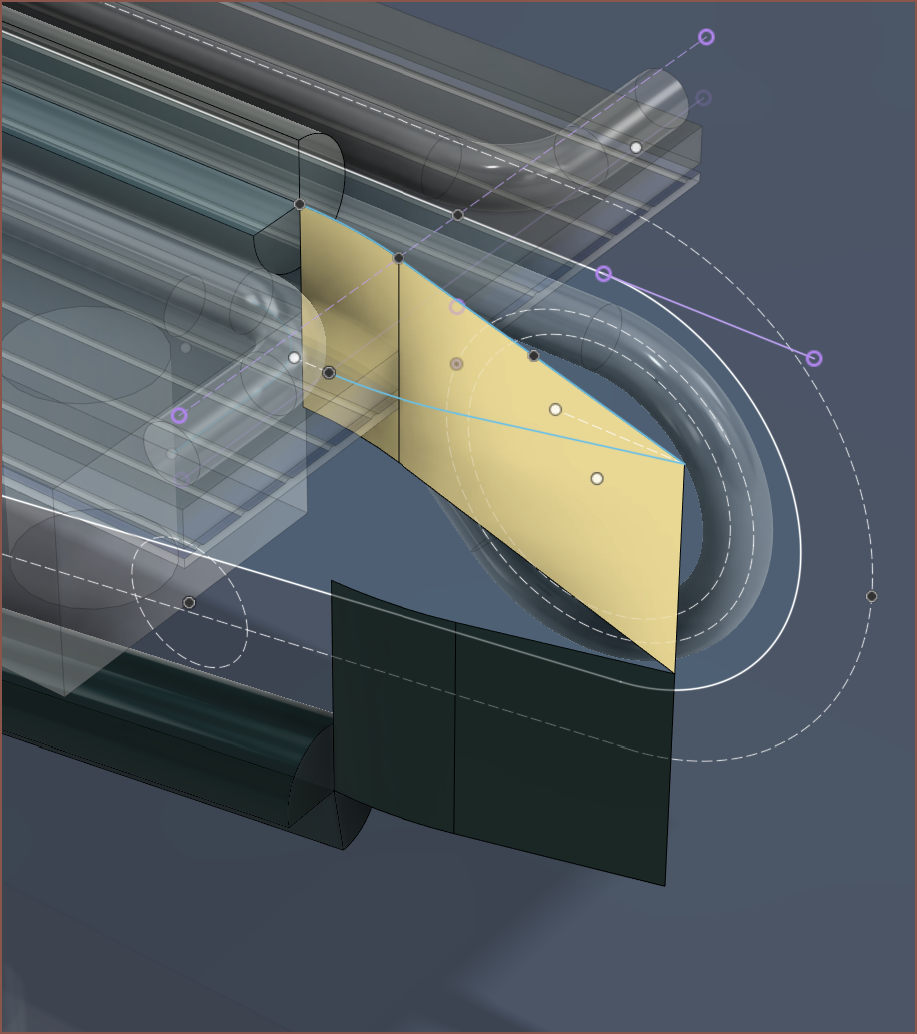
The above didn't look right, so I made a helix, projected it and I think I got a good approximation from a 3 point spline:
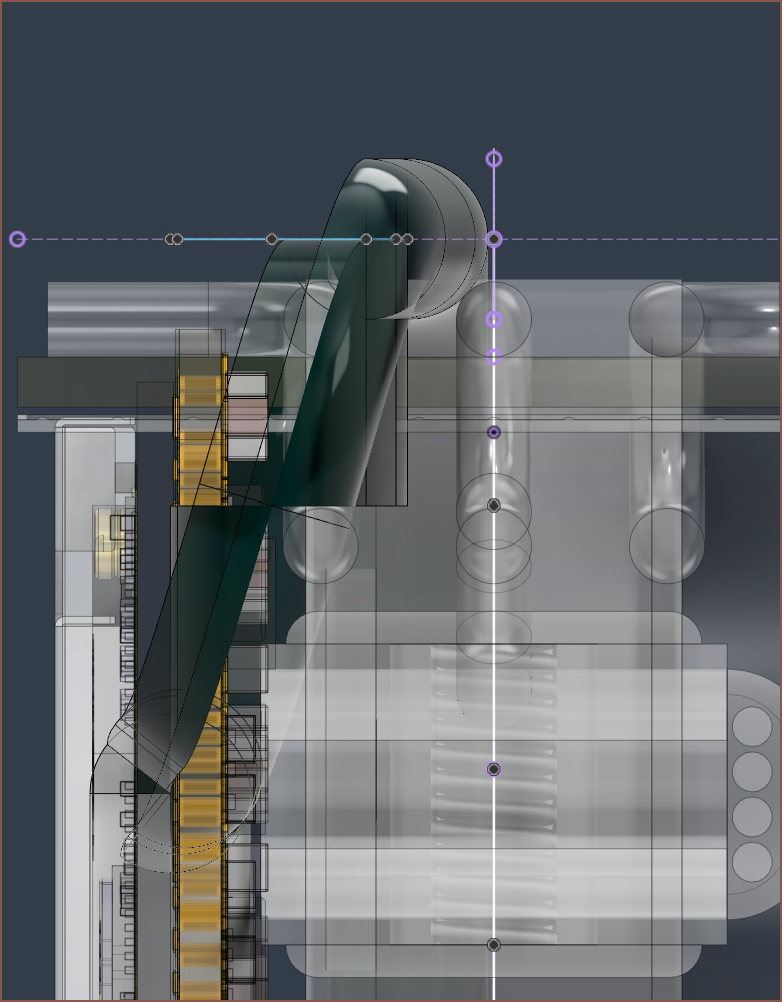
Lastly, I added some Jointables (surfaces I use to joint this component to others in other files) and imported it into the Tetent file.
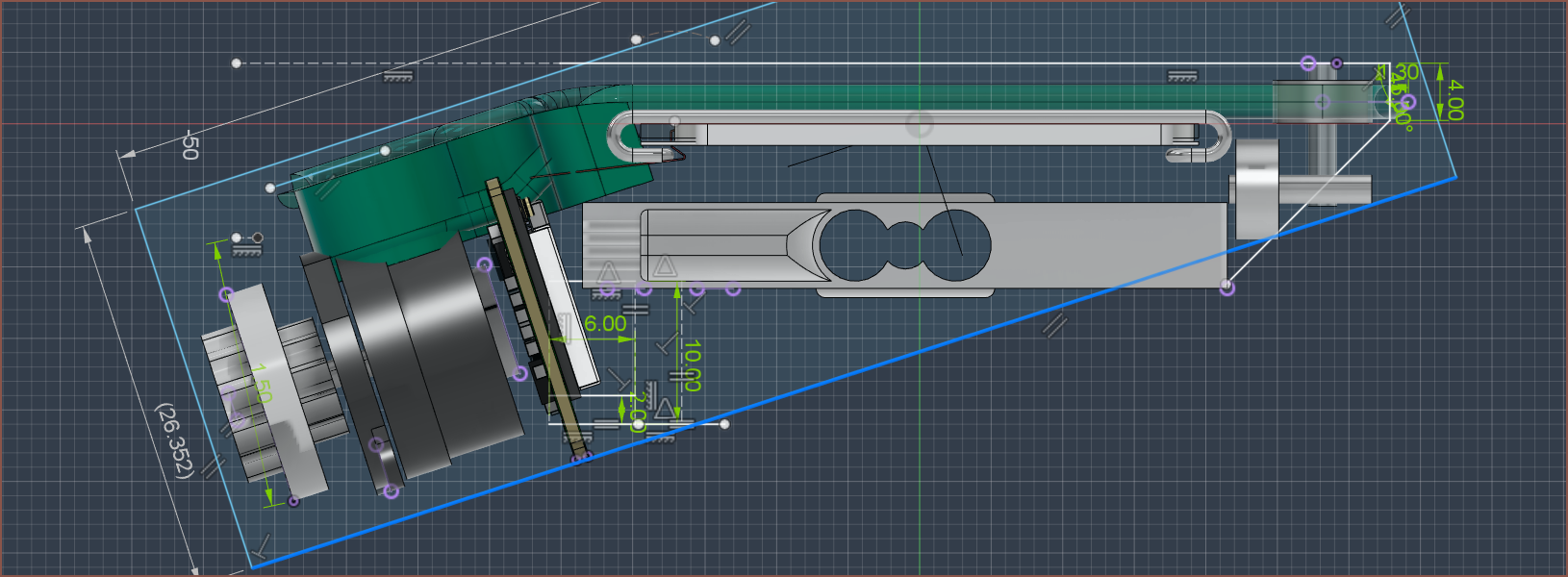
I've barely got any space left if I don't want to make #Teti [gd0022] larger.
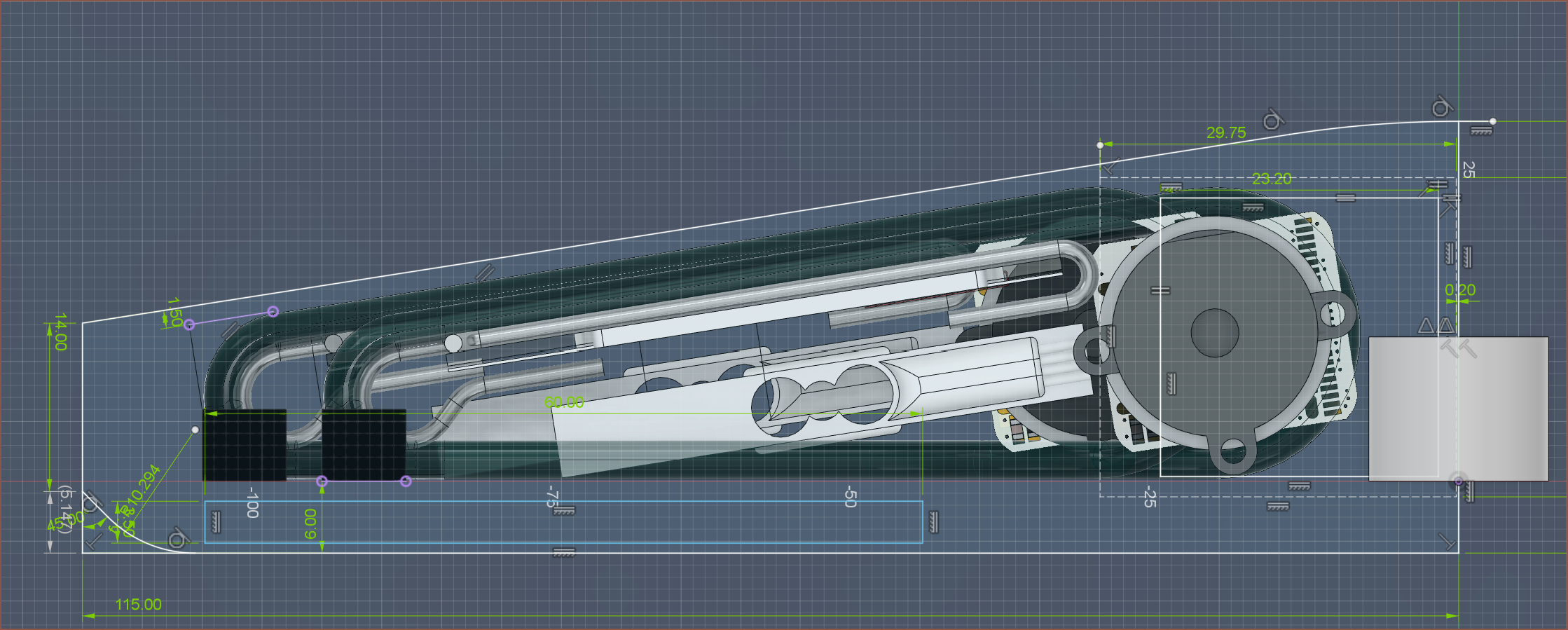
The active area of Tetrinsic is now 48mm, up from 32mm. It's likely that I'd have to loop the steel wire under, like what I've done on the motor side. In that event, the active area will be 52mm and the footprint length will be 3mm longer.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.