 MasterOfNull
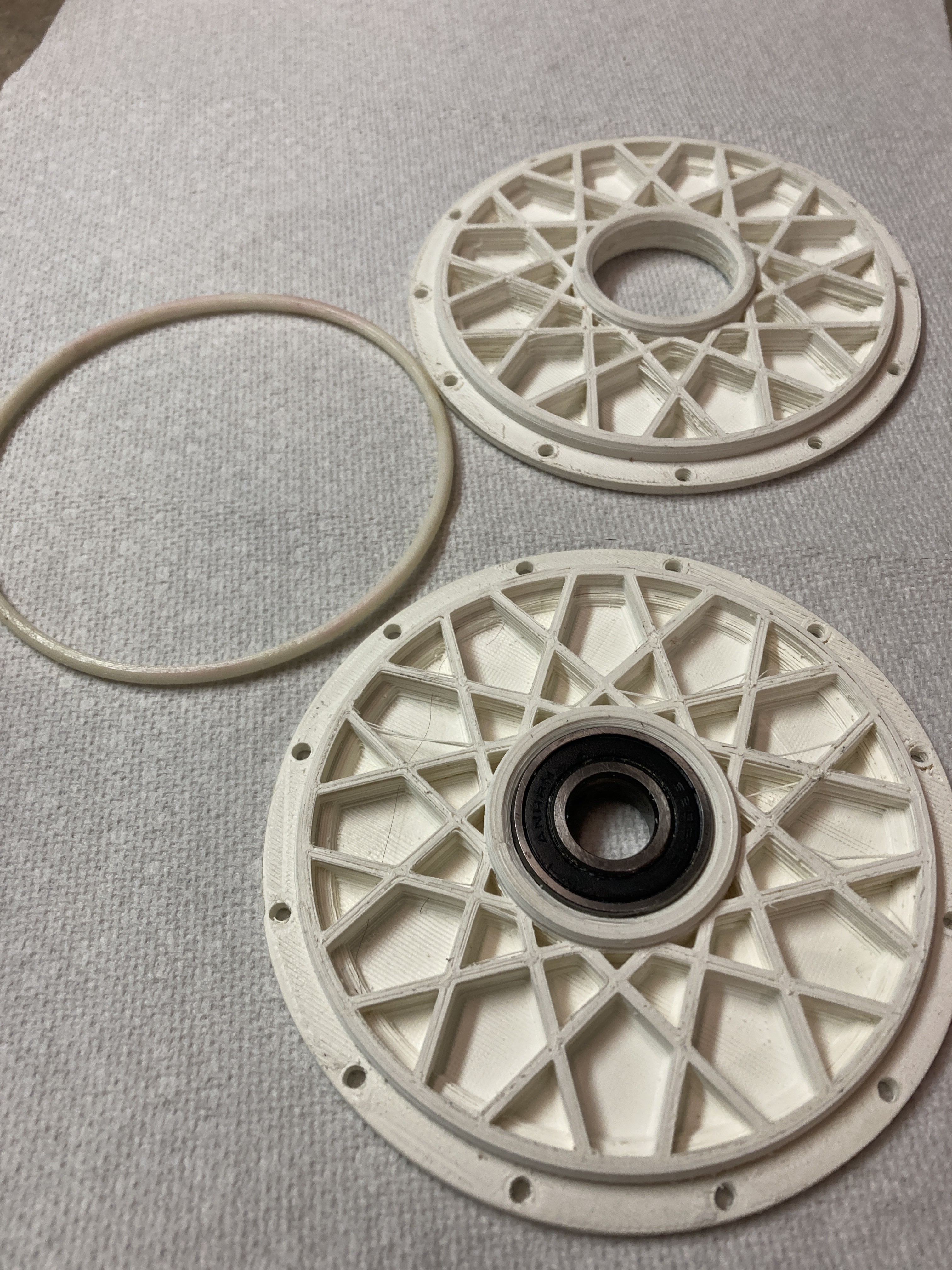
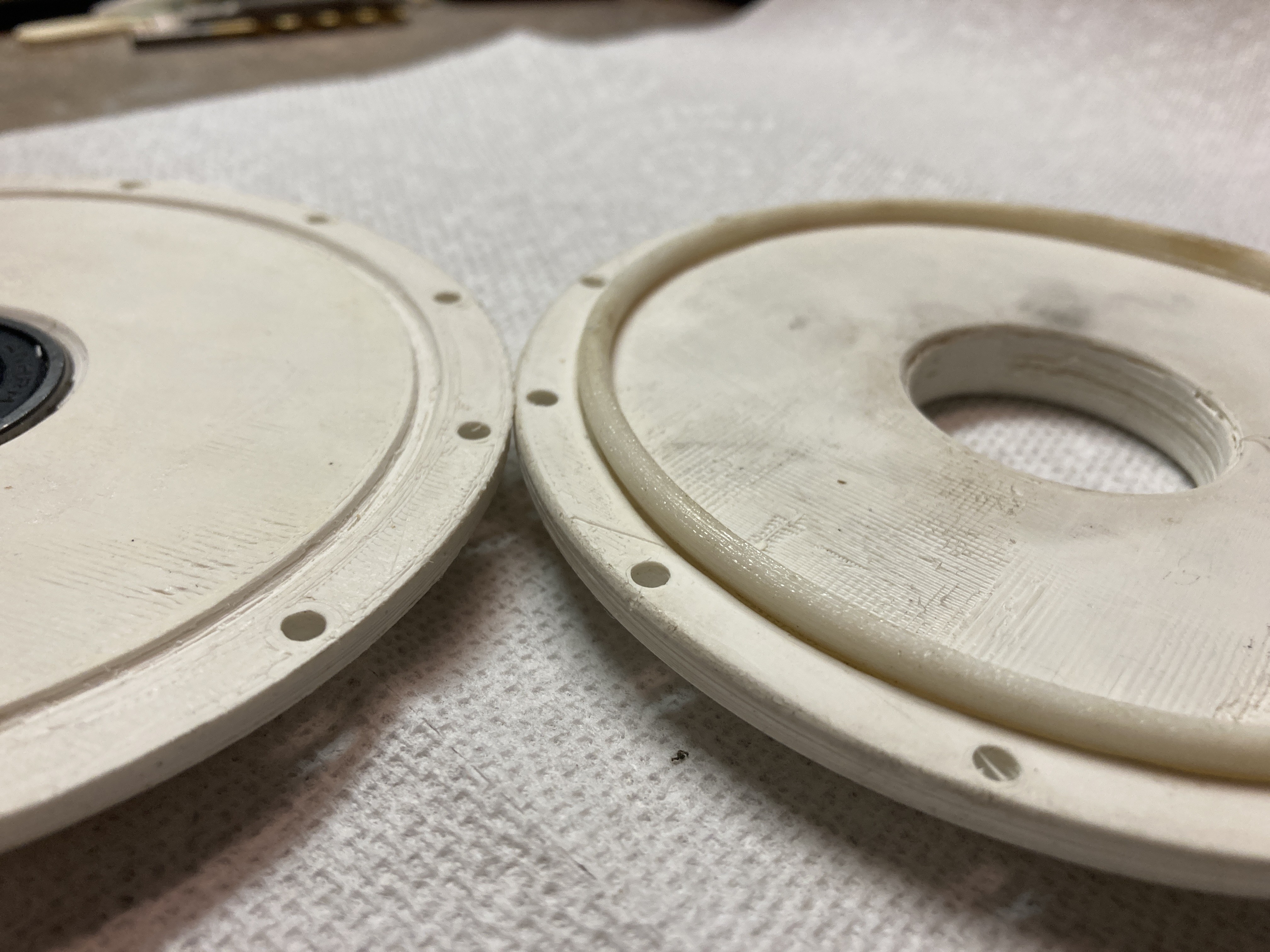
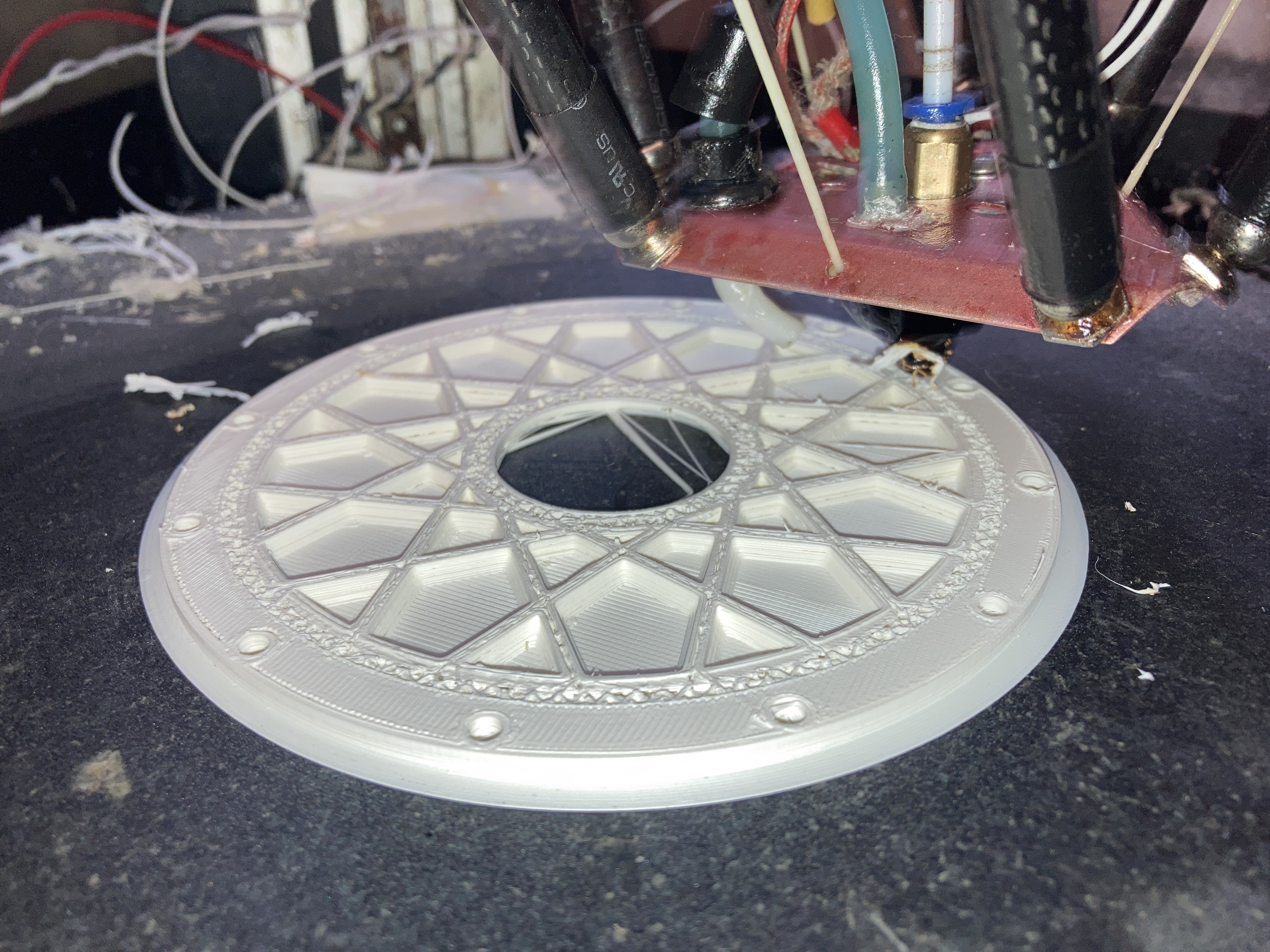
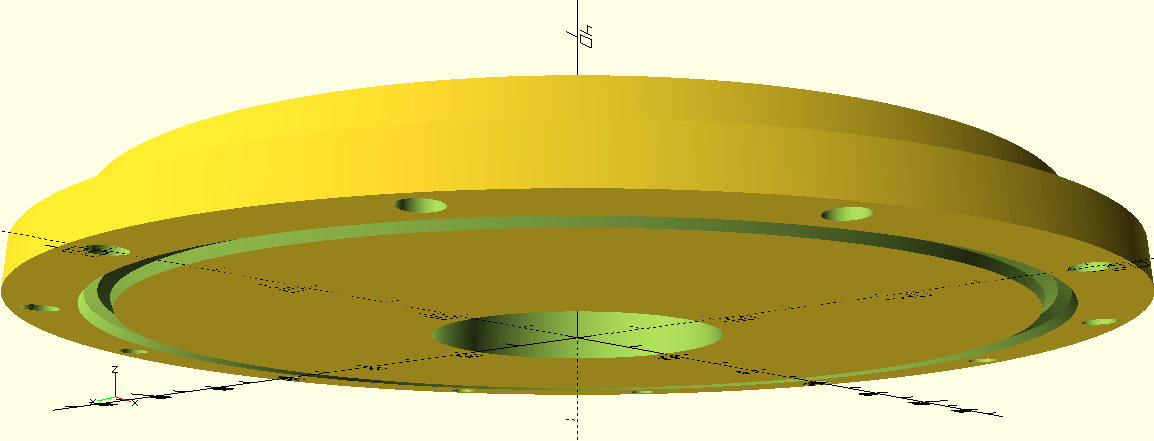
MasterOfNullThis is only one hub, and it is going in the wrong direction.. but it is a start.
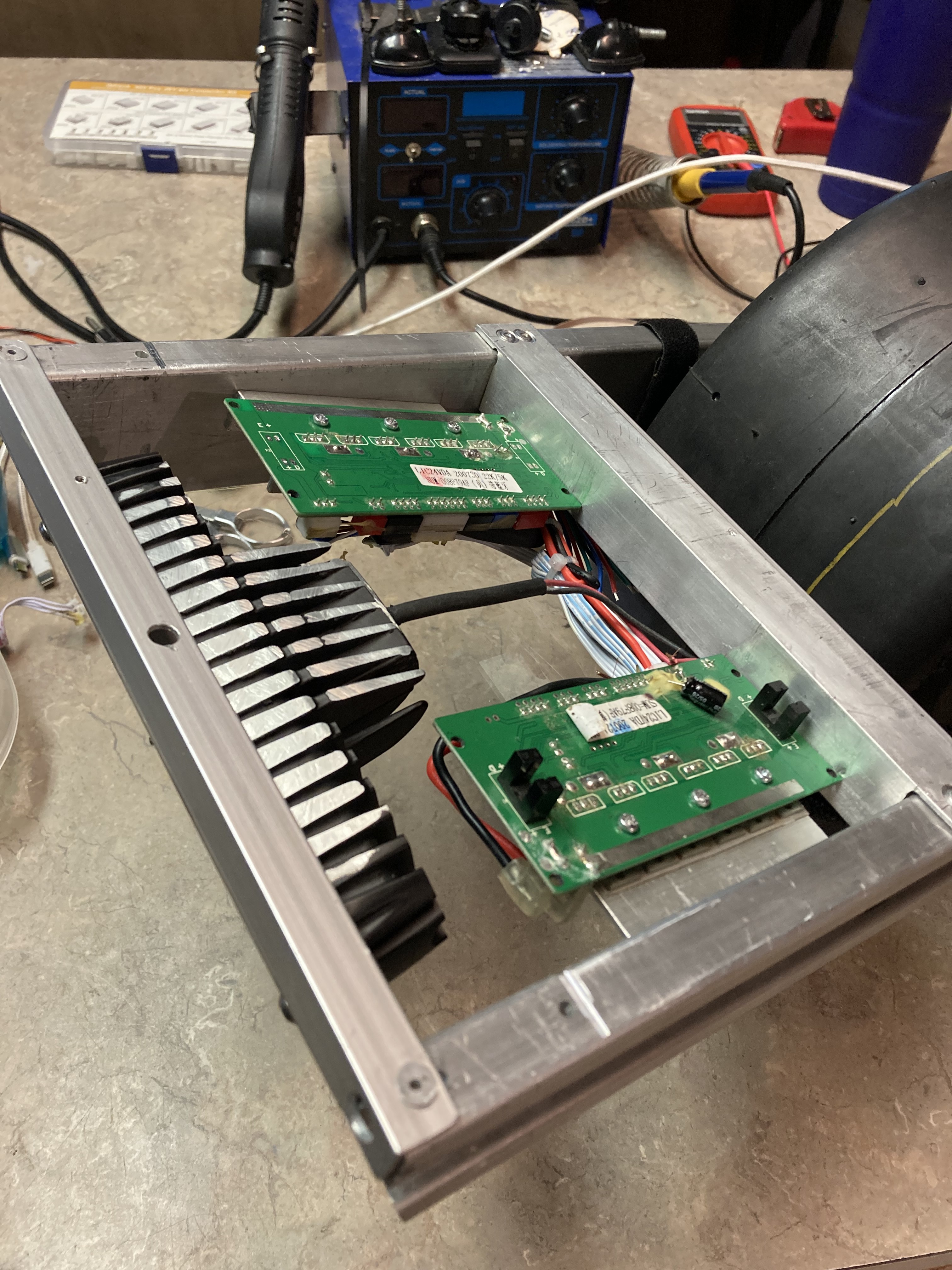
Estimated output per hub is at 390W by moving from a 7S to an 8S battery. So total power output should be 780W.
Not all of that will be usable as balance needs to be maintained.
Scaled up from the donor hoverboard tire dimensions this puts the top balanced speed at ~15mph, but this does not account for the voltage increase.
Soon to be measured.









 Paul Crouch
Paul Crouch
 Quinn
Quinn
 Jorj Bauer
Jorj Bauer
 Adam Curtis
Adam Curtis
I hope you will succeed and build a drivable one-wheel. I had to convert mine into a scooter https://hackaday.io/project/180964-diy-electric-one-wheeled-vehicle