0%
0%
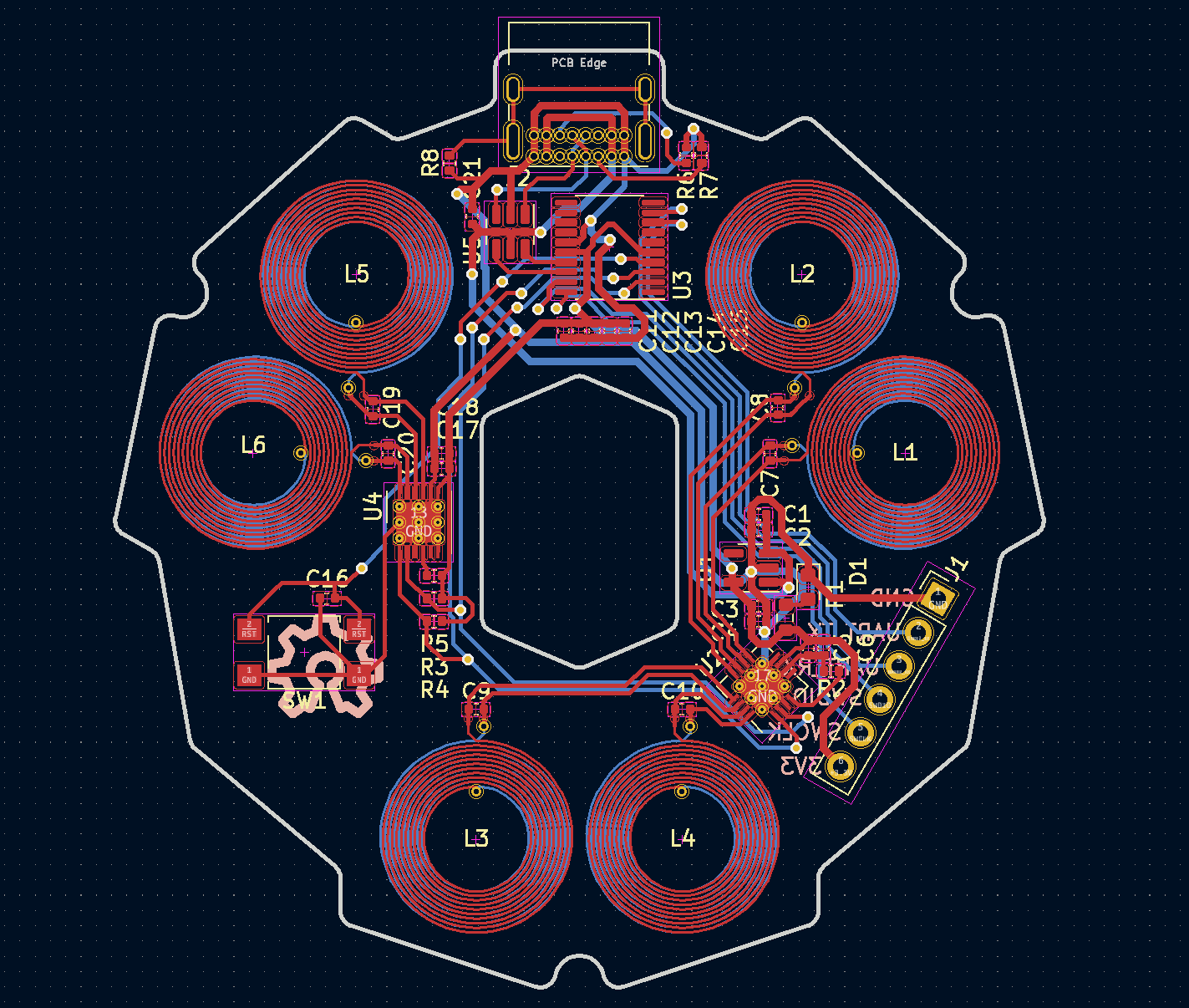
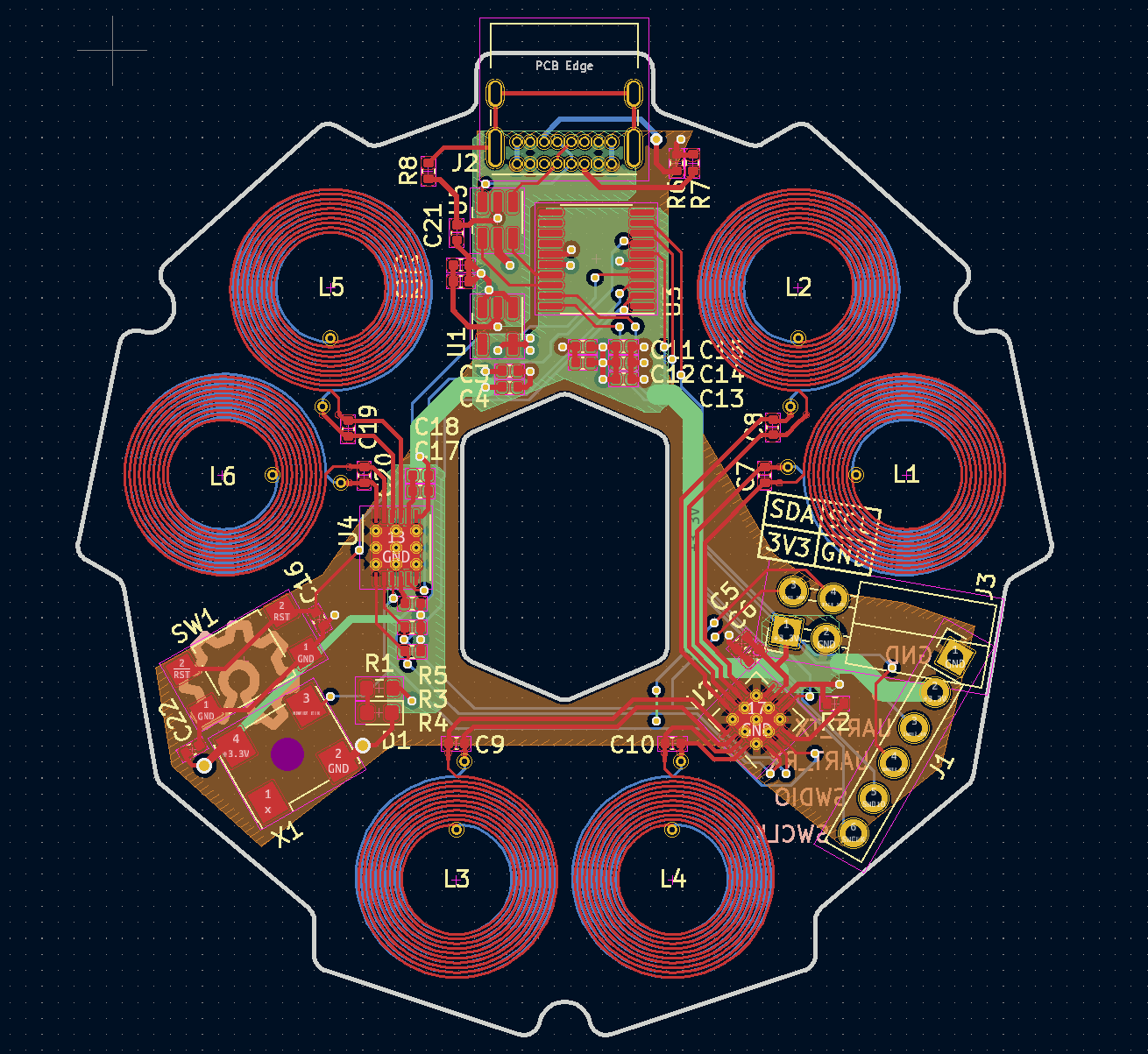
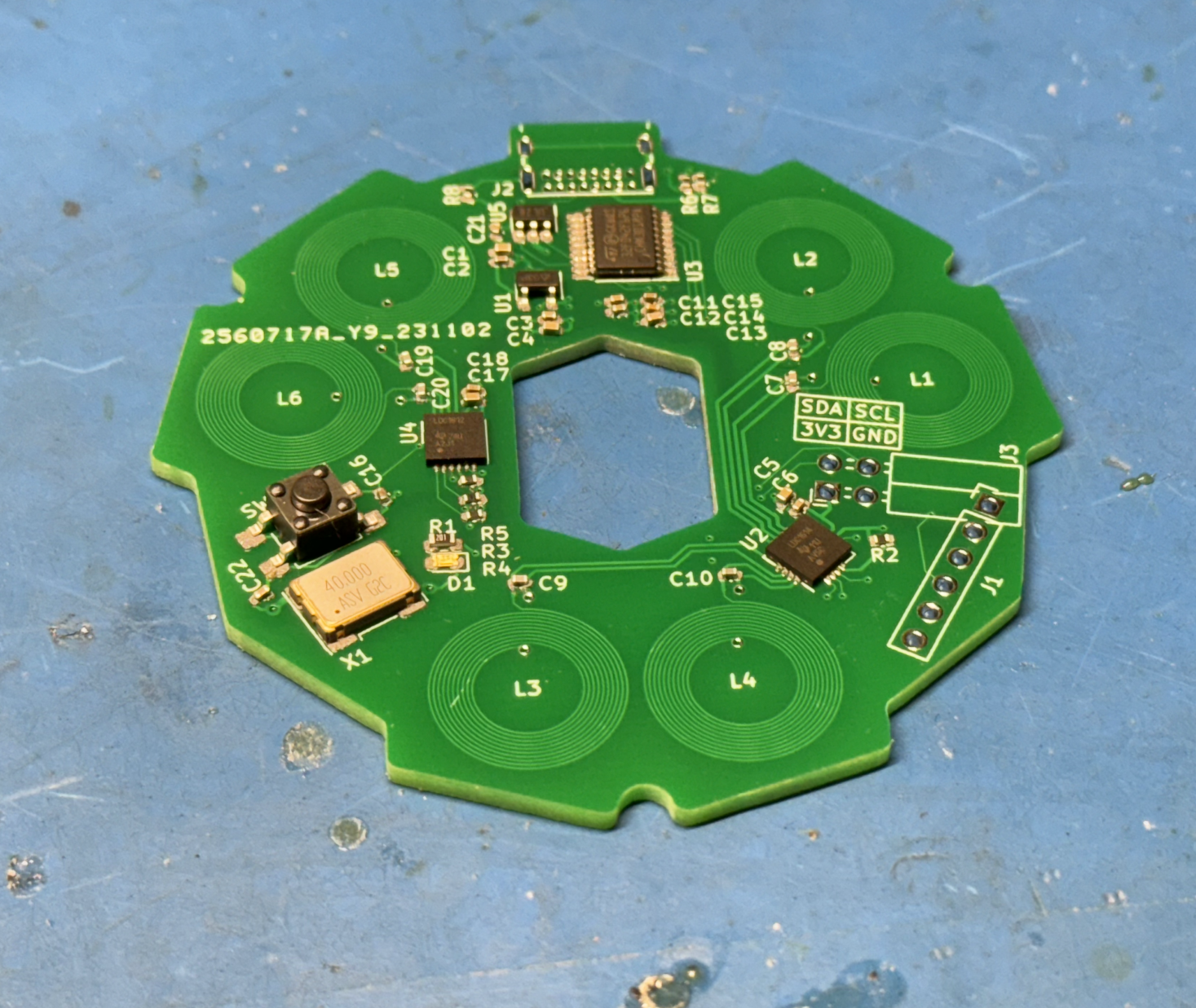
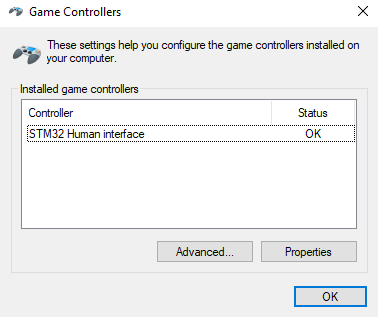
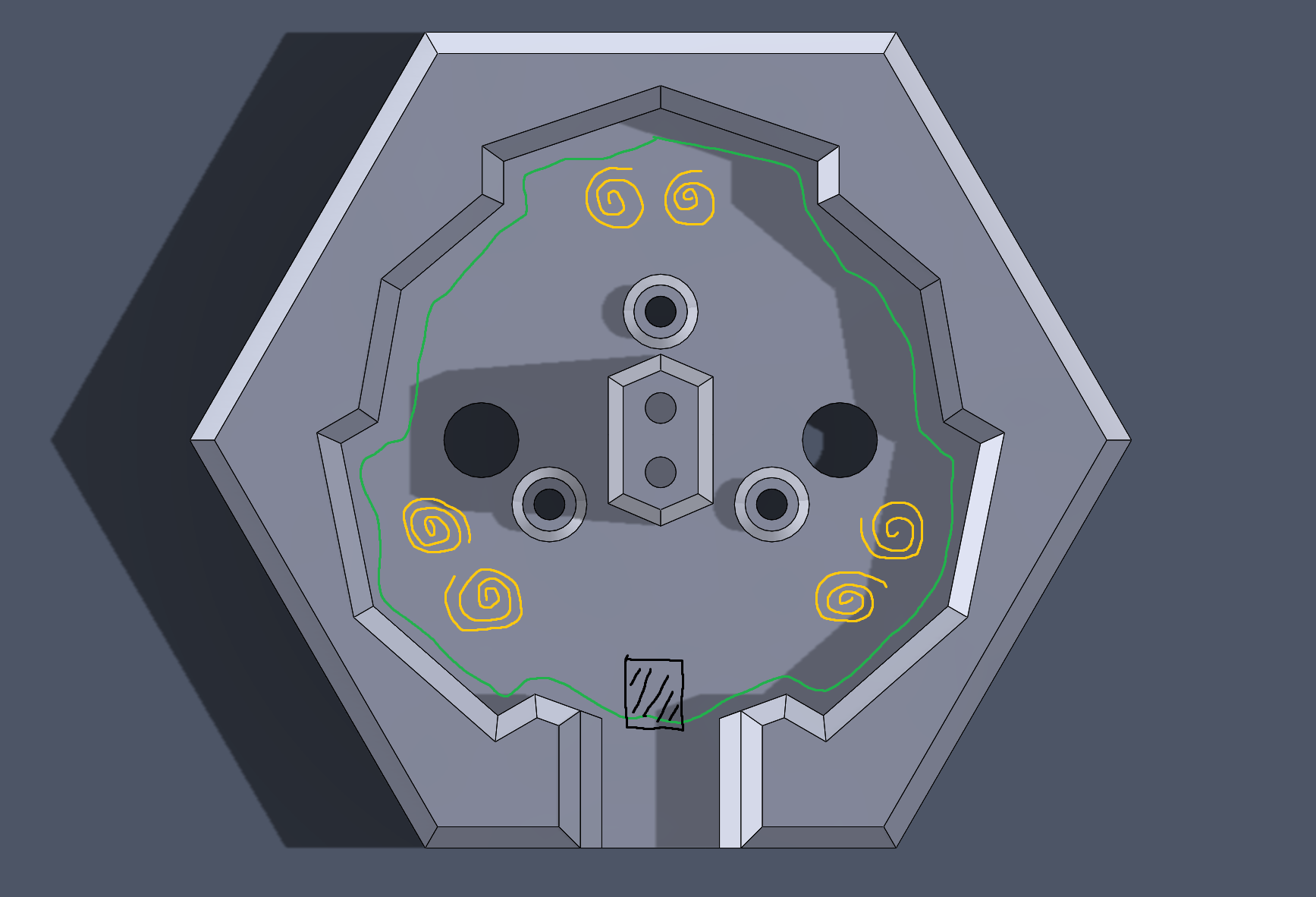
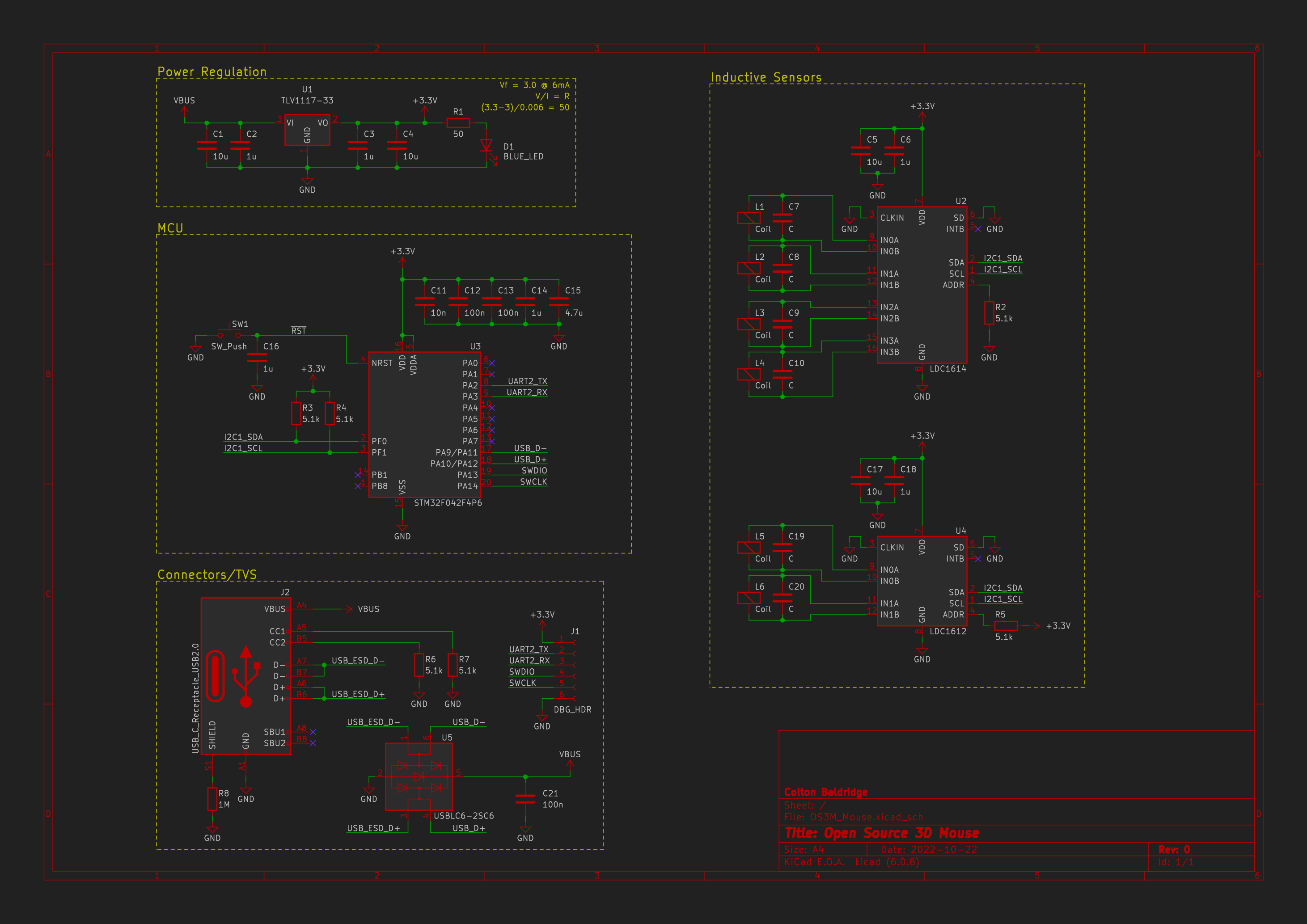
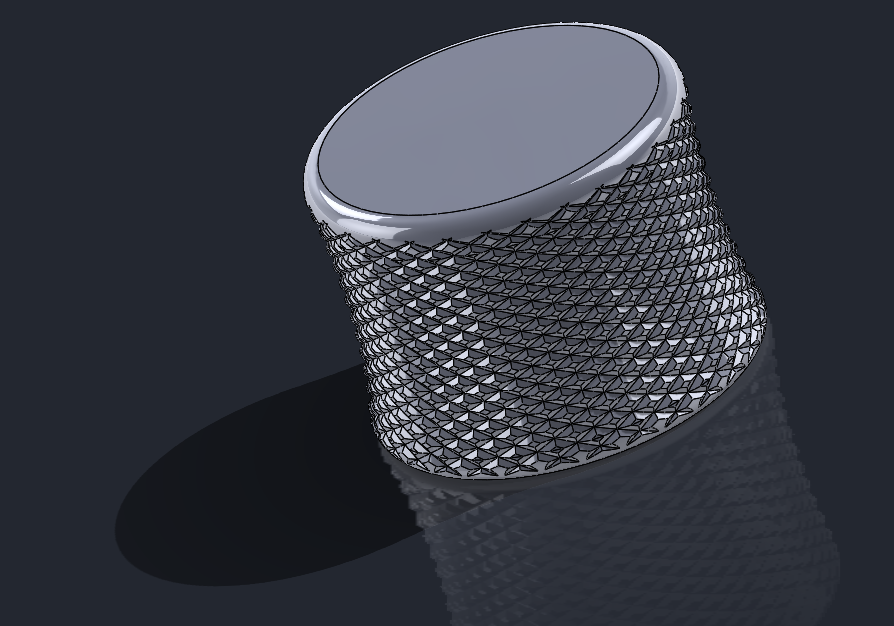
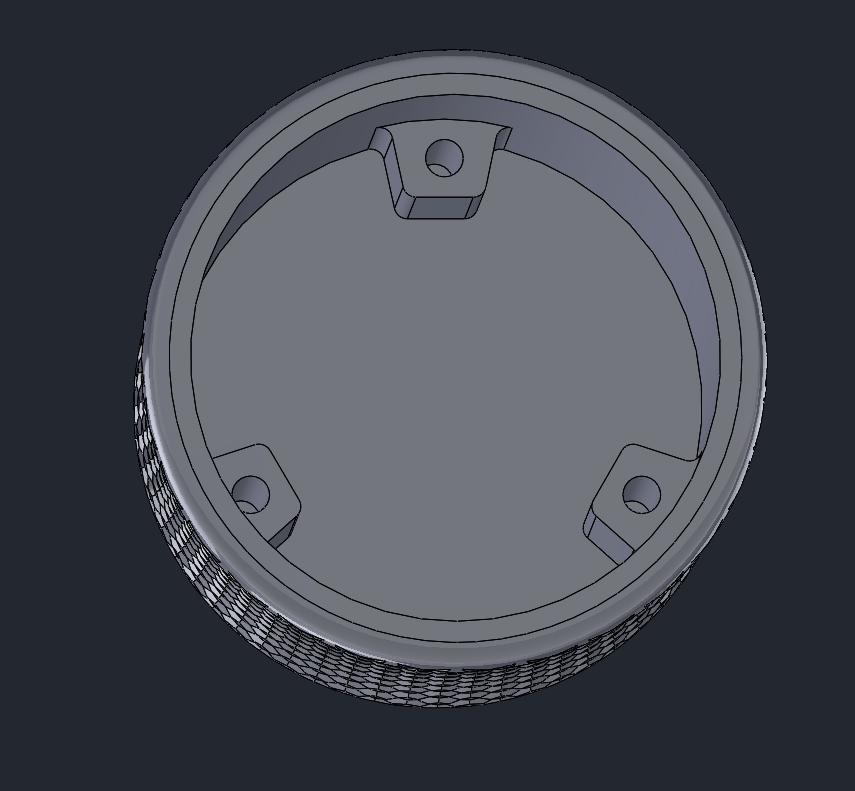
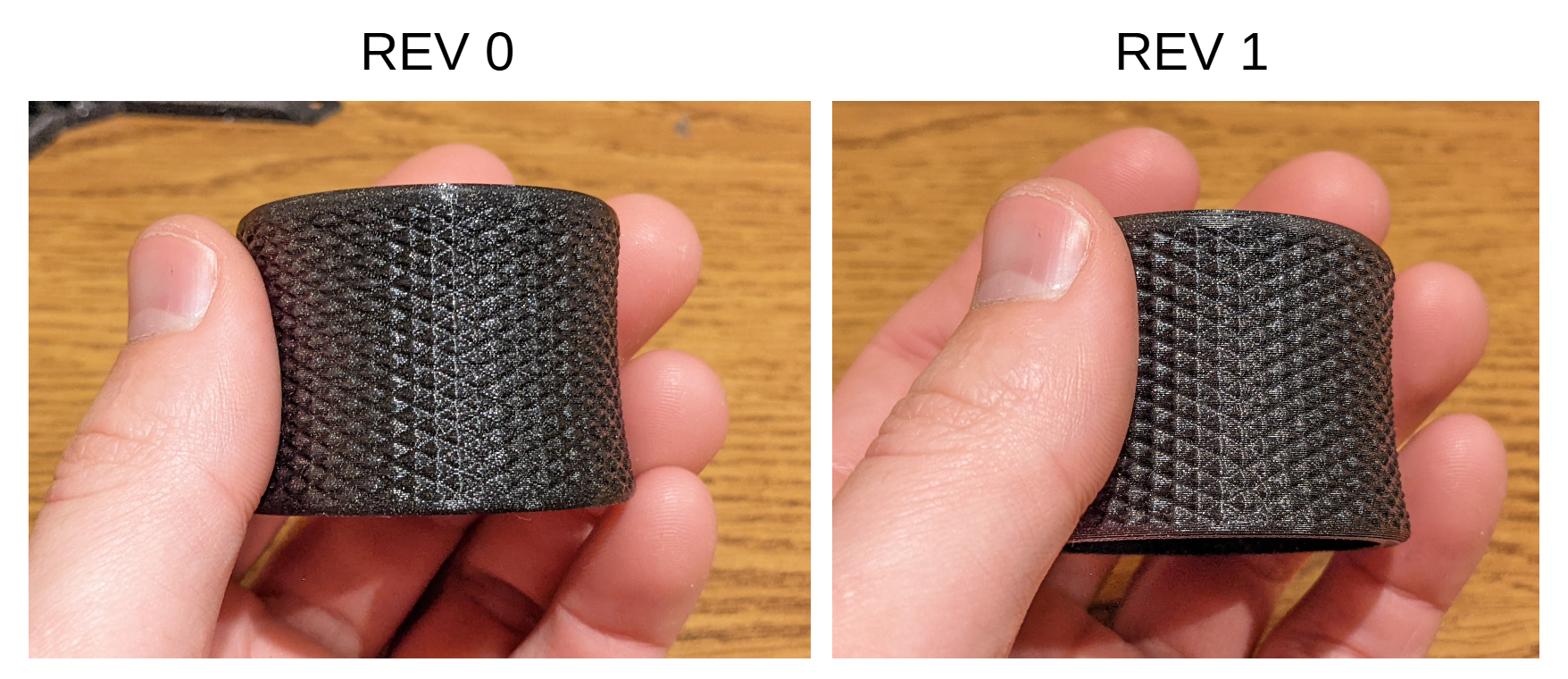
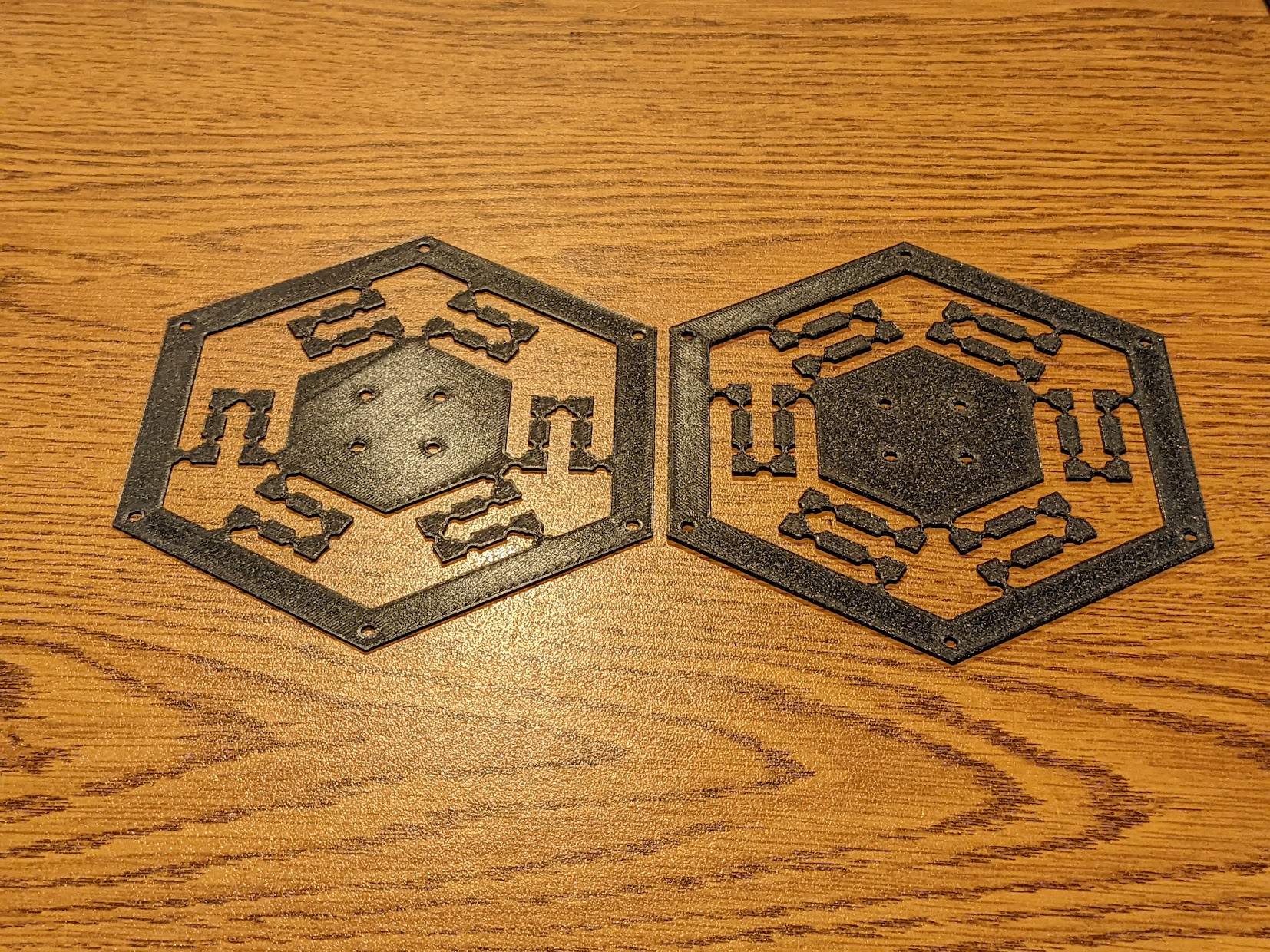
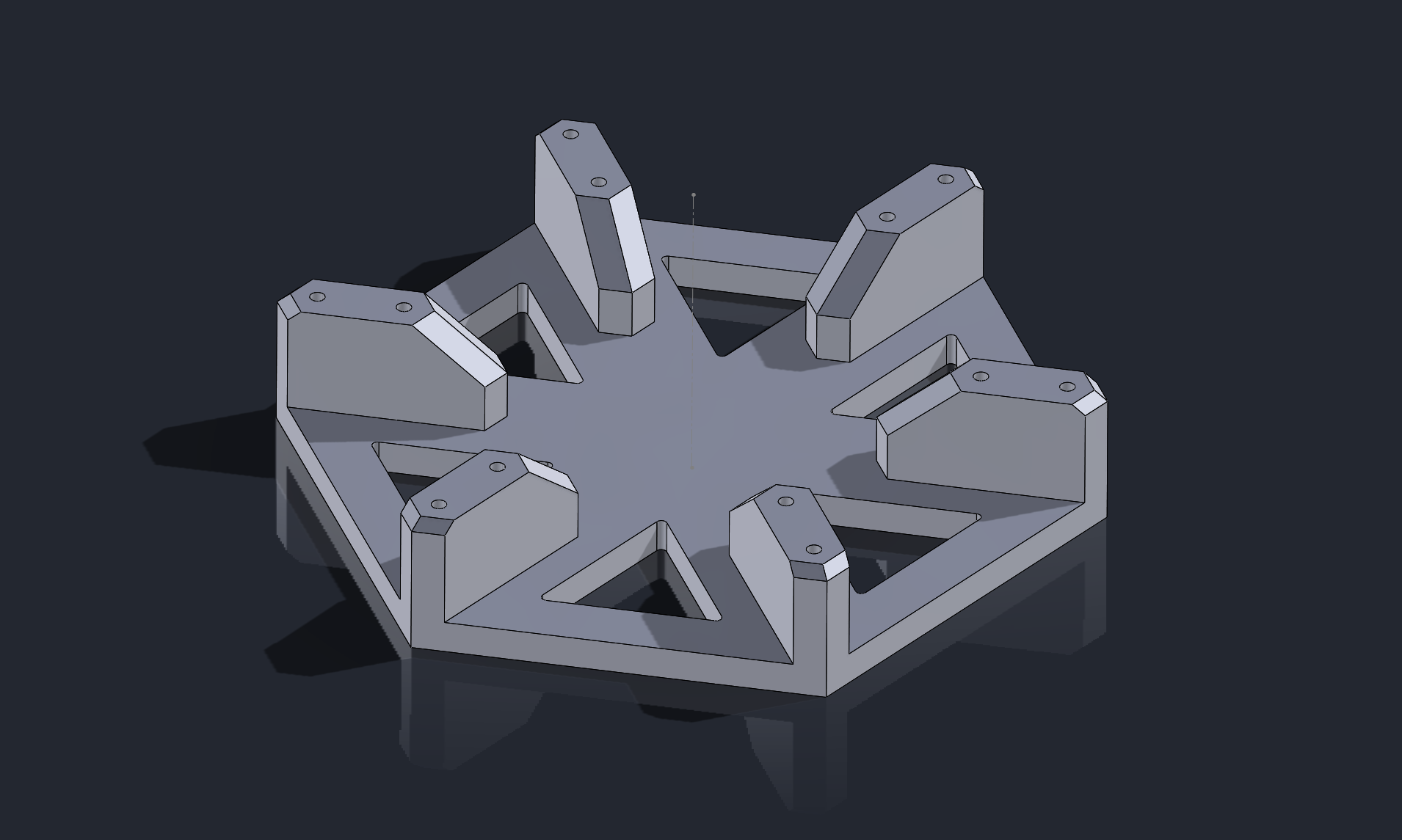
OS3M Mouse
"Awesome" Mouse - the open source 3D mouse... mouse
 colton.baldridge
colton.baldridgeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests























 Applied Procrastination
Applied Procrastination
 Victor Dedios
Victor Dedios
 Brandon Hart
Brandon Hart
 marcs
marcs
It's not clear to me which software are compatible with it. Fusion 360, FreeCAD, Solidworks, Solidedge? any of them?