-
Replaced BMP280 with DPS310
09/01/2023 at 21:54 • 0 commentsWe replaced the pressure sensor with the DPS 310, because for my taste the datasheet was much easier to read and I thus got this new sensor working to my satisfaction. Very happy with the change.
-
3D Line Angle Sensor using Magnetometer of MPU9250
09/01/2023 at 19:11 • 0 commentsWe use a single 9-axis MEMS motion sensor to sense both orientation of the wing and the angle of the line with respect to the wing. Accelerometer and Gyroscope are used to determine the wing orientation. The magnetometer measures the magnetic field of a small magnet attached to a triangle whose vertices are attached to the wing via parallel strings. In the middle of the triangle we attach the kite line. The length of the connecting strings must be such that the magnetic field is greater than any surrounding ones but always smaller than the bounds of the sensor. Furthermore we choose the string lengths such that when the triangle touches the wing the magnetic field measured by the sensor is about 90°. Also the triangle must be as thin as possible to achieve a possible angle near 90° before the triangle tilts and the connecting strings fail to stay parallel.
-
Kite Connectivity
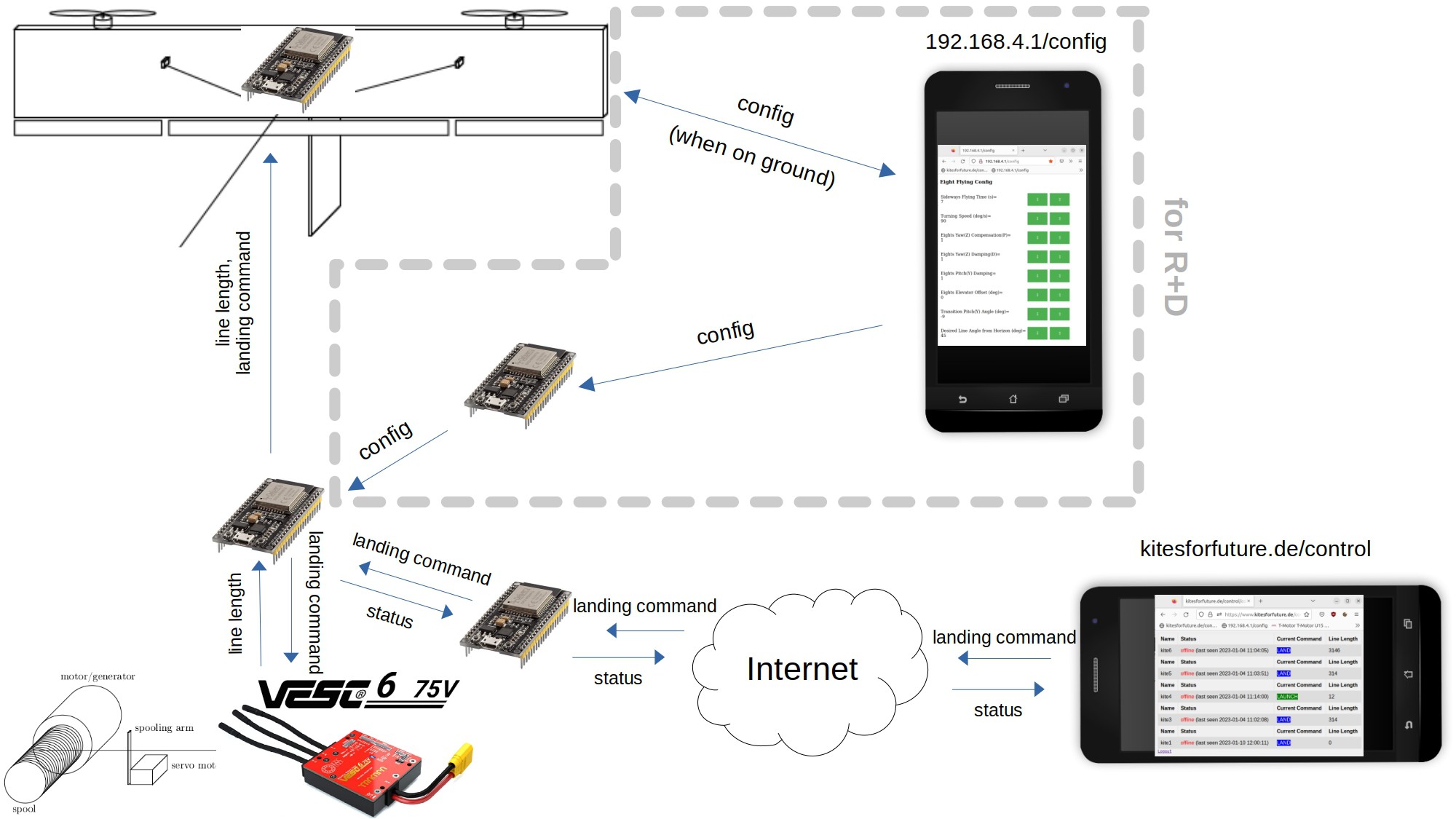
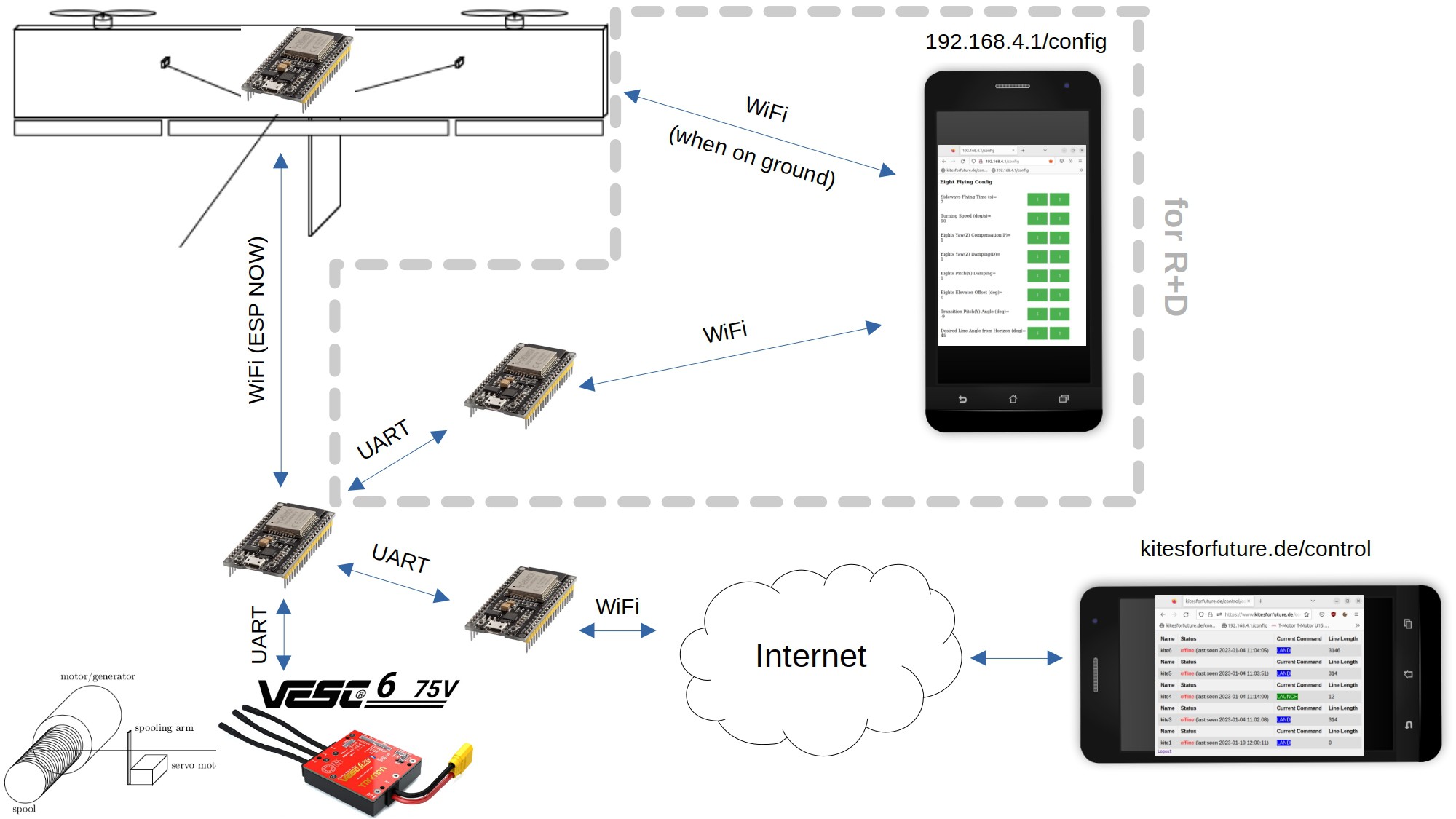
01/11/2023 at 14:44 • 0 commentsOur most recent addition of functionality:
1. Configuring PID variables, target height, etc. to tune autopilot behaviour (locally via WiFi)
2. Initiating launch and landing from home, viewing the current status (via Internet)
Here is how it's implemented:
![]()
![]()
-
GUI for configuring autopilot
12/14/2022 at 14:41 • 0 commentsWe spent a considerable amount of time tuning PID constants in the field. The process involved connecting the autopilot to the PC via a USB cable, editing C code, compiling and flashing the whole autopilot code for every adjustment of a PID variable.
We want anybody to be able to build this kite in any size and configure the autopilot accordingly without having to edit C code.
And we want to make life easier for ourselves so we can draw any smartphone to change the autopilot configuration.
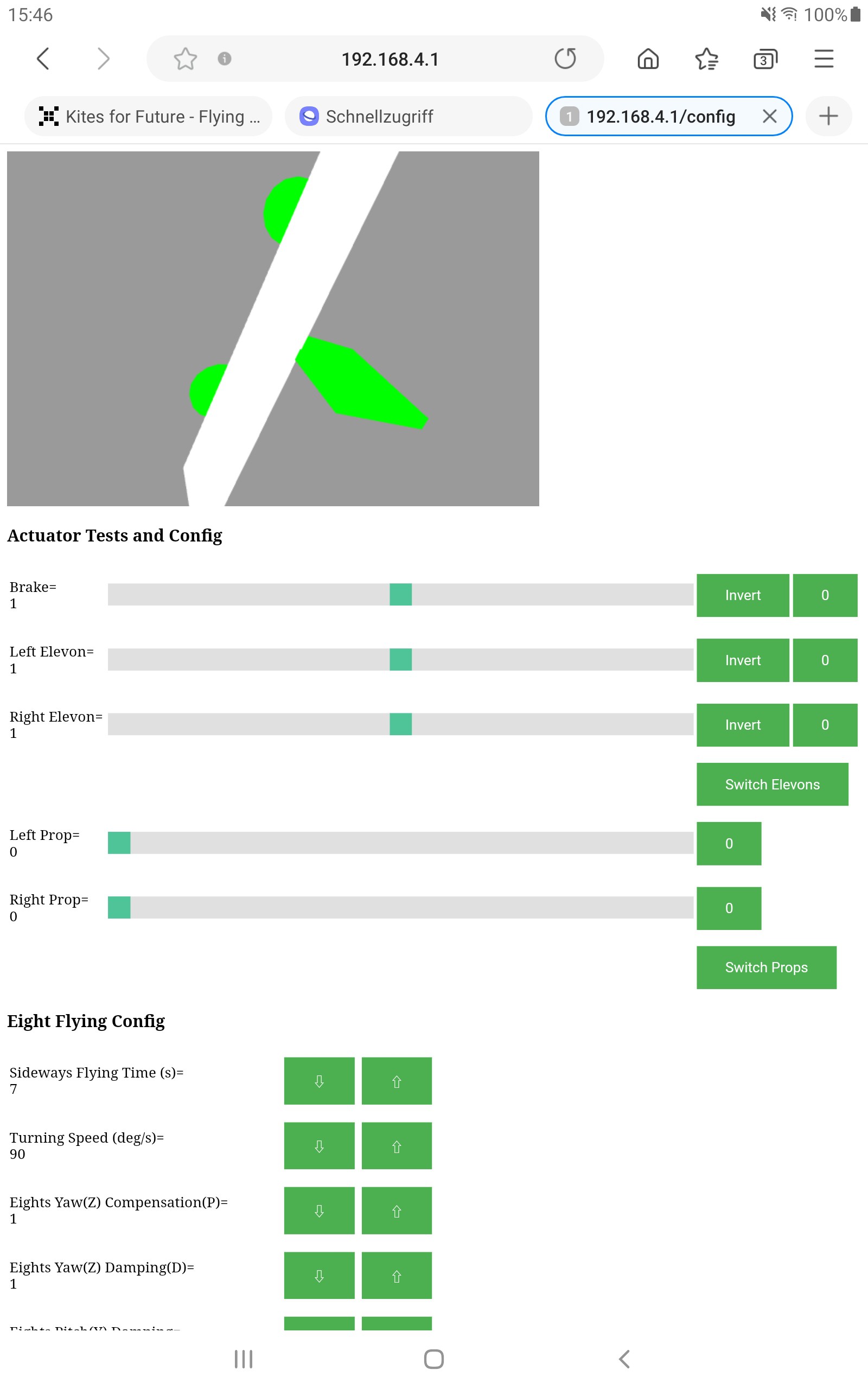
So now we can do exactly that. While the kite is on the ground, we can also test sensors and motors via Wifi using the GUI below.
![]()
Best part: Adjusting the PID constants should work during flight too.
So from now on, no programmer is needed to continue on this project. If you want to copy our kite power station, we're happy to help to make it as easy as possible.
Kites for Future - Flying Wind Turbine
A flying wing drone that can periodically pull a tether + a generator on the ground that acts like a rowing machine = Flying Wind Turbine