 Jon VB
Jon VBThis project will not be a high end drone. There will be limits as to the quality for the video feed and distance at which this thing will work. Really this thing is just a hack for things that are not supposed to be used in this way. Hence why it will be cheaper.
Video for most drone's is done VIA analog NTSC/PAL interface. This project is using a digital SPI/I2C interfaced camera with a max FPS currently of about 10-15. The base camera module is a OV2640 that is attached to a board with a controller IC and buffer with about 4 or 8mbs of ram for buffering.
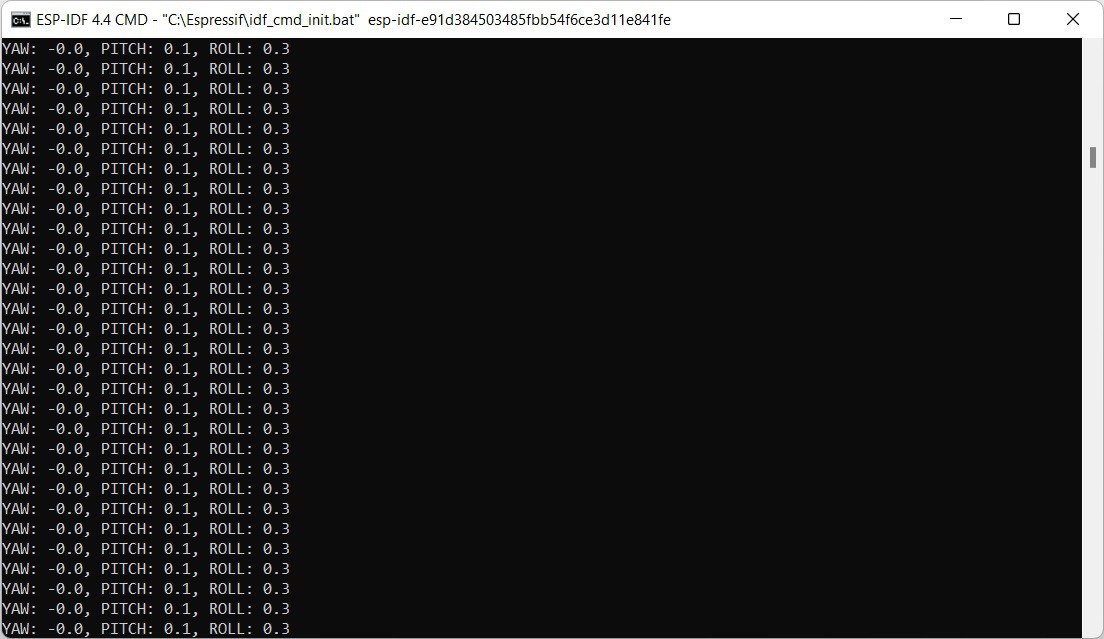
The ESP board wasn't exactly designed for this usage, handling the PID for control and stabilization from the gyro. Along with WIFI communication and video streaming from the camera will be a challenge in it's self. there will definitely need to be a good bit of optimization and maybe some inlining to get this thing to do all that it needs to do.
The point of this project is to get people a foot in the door to play with drones, electronics and code at a low cost. Something they can possibly build off of as they go.
At one point I was one of those kids, I was that person. Working with limited resources and limited funds helps to breed inventiveness. How can we get something to work as we want it to, that isn't exactly designed to do what we want?







 Cees Meijer
Cees Meijer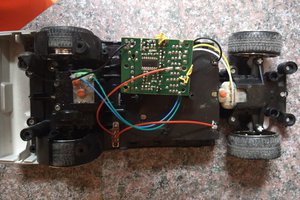
 Blake W. Ford
Blake W. Ford
 Skyler Brandt
Skyler Brandt
 Matthew James Bellafaire
Matthew James Bellafaire
Hi Jon VB,
thanks for sharing your project. At the moment I'm trying to recreate your drone. I noticed that the capacity of capacitor C1 is not specified in the circuit diagram. Can you please help me with this?
Regards