 Christopher Xu
Christopher XuYoutube channel with short videos
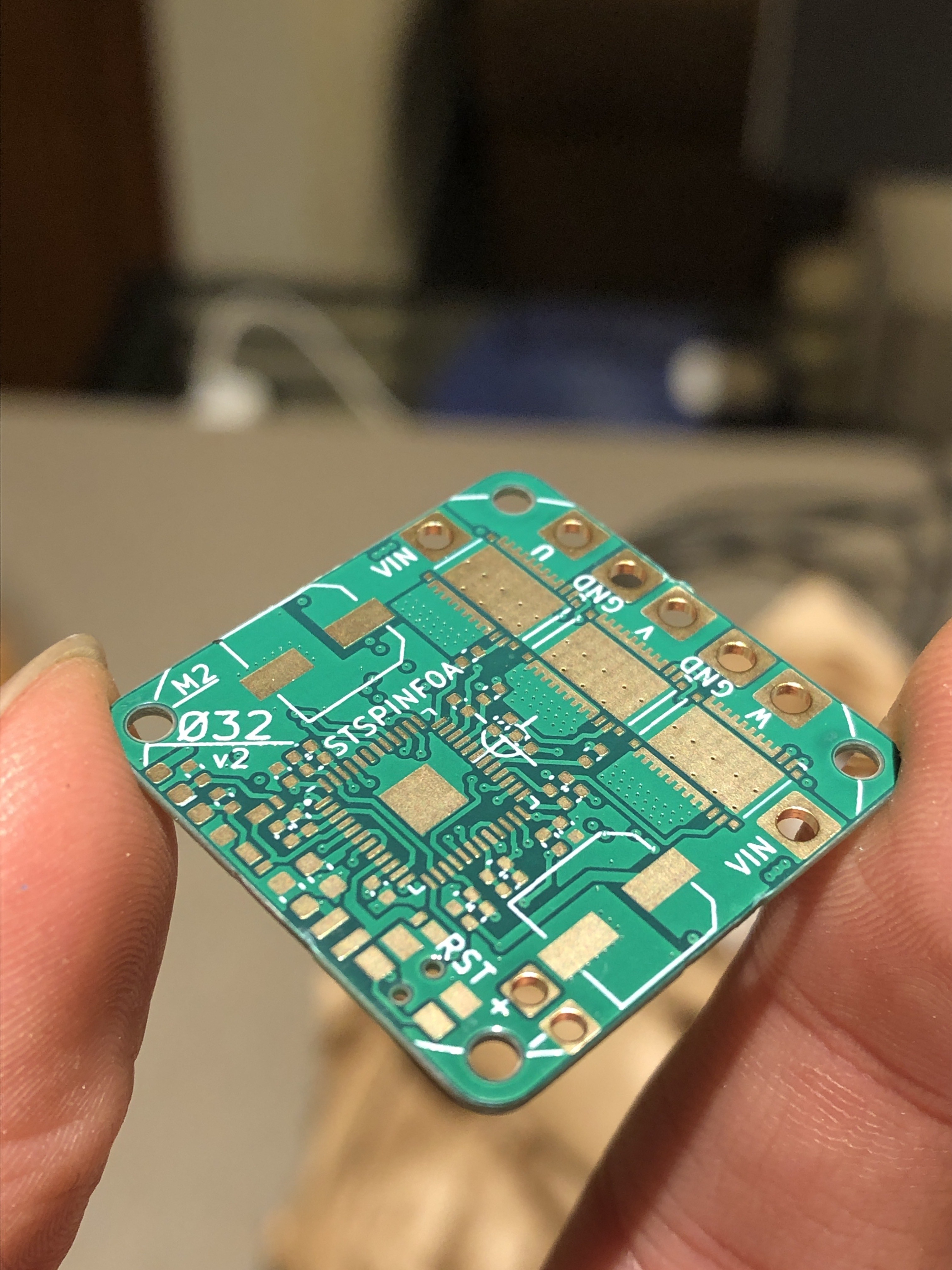
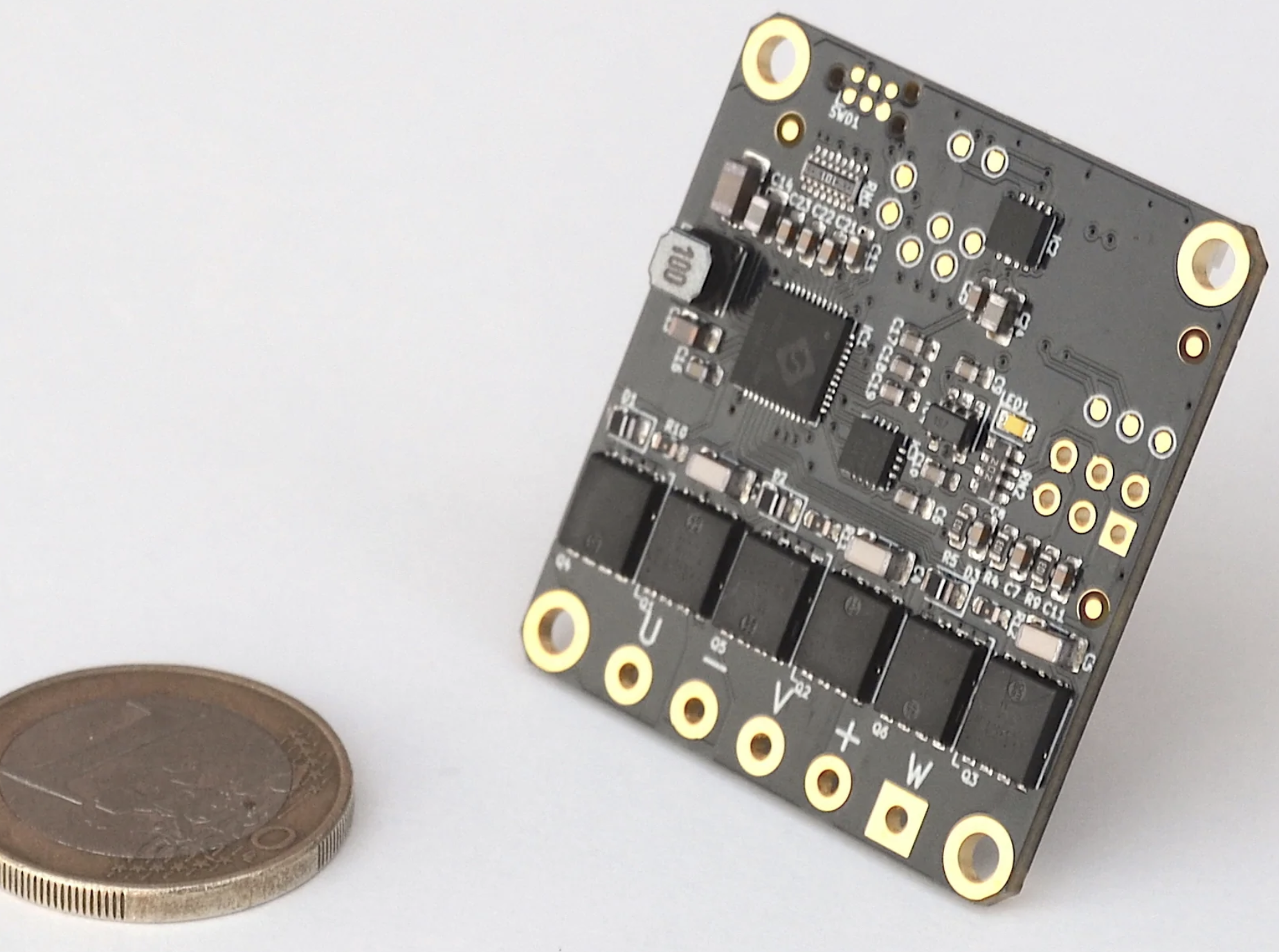
Application project of motor driver
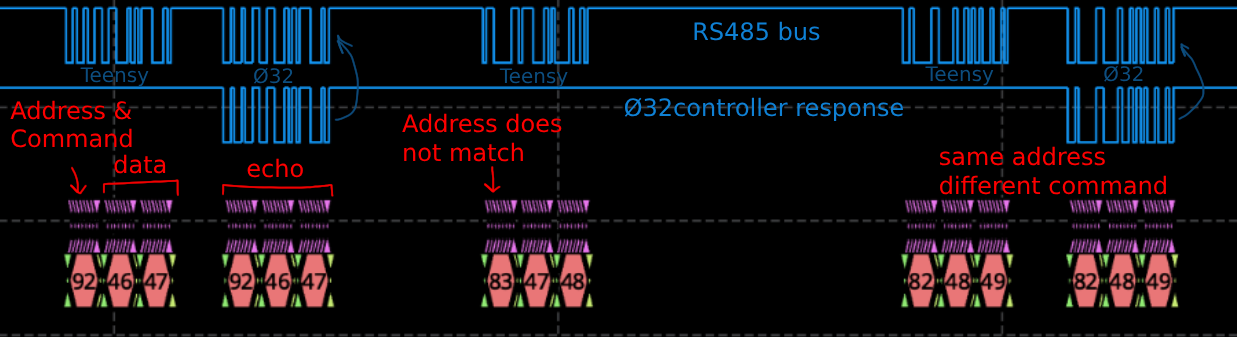
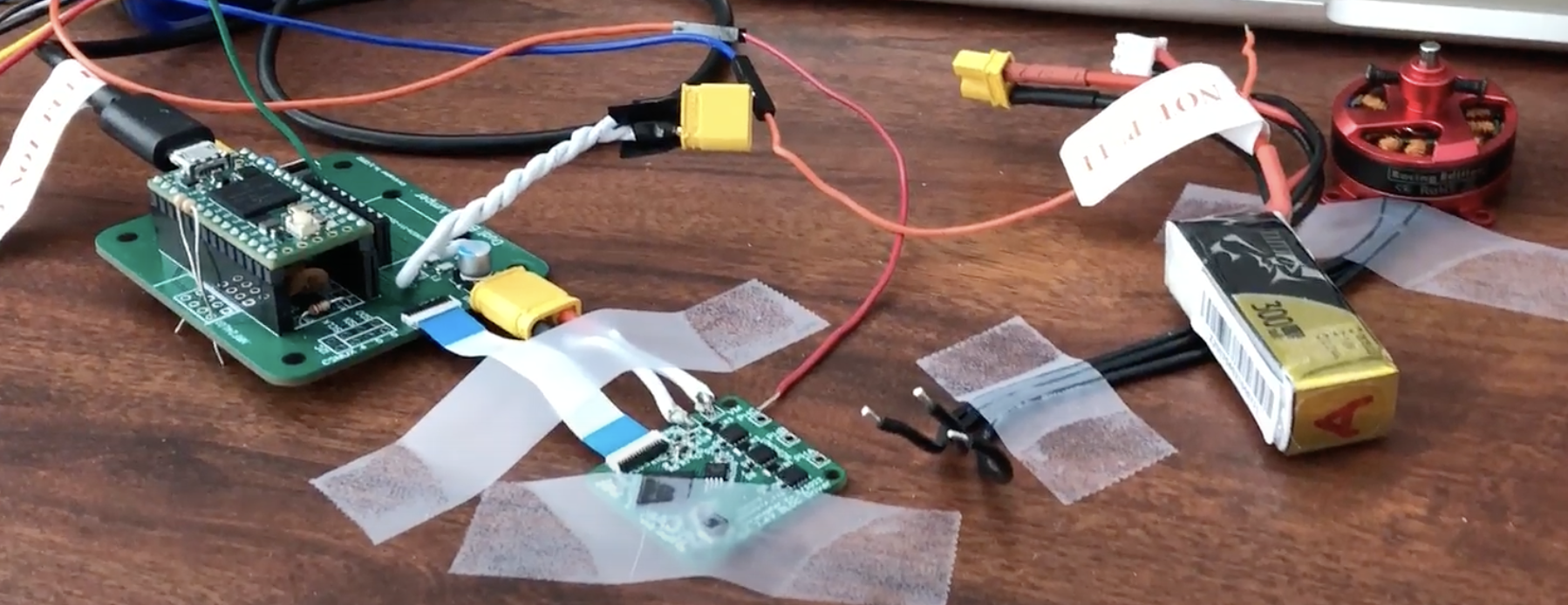
Works with my RS485 controller
Specs:
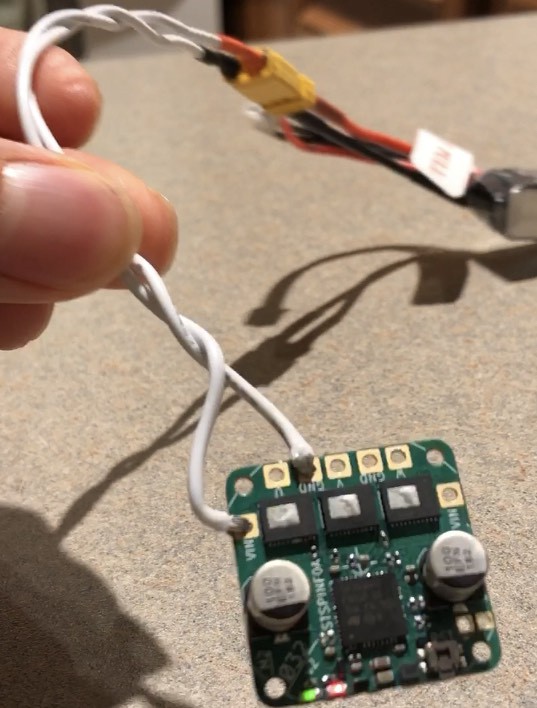
- M2 mounting holes on a 32mm diameter circle
- 27mm x 27mm x 0.8mm, 4-layer, 1oz copper PCB
- 7-15V input, built-in voltage sensing
- Internal temperature sensor
- 12-bit magnetic angle sensor
- 3 shunt current sensing and overcurrent protection
- 2x 2-pin JST-SH connectors for I2C for RS-485 communication, allowing daisy chaining
- 1x 4-pin JST-SH connector for Serial Wire Debug programming and UART output
- External SPI for mounting encoder farther away
- NTC thermistor for monitoring coil temperature
Critical components:
- STSPIN32F0A BLDC gate driver and Cortex-M0 MCU
- MA702 magnetic angle sensor
- CSD88584Q5DC dual MOSFETs (40A continuous)
Tested:
- 12200 rpm with a 1800KV motor
- 12A bus current at full torque stall
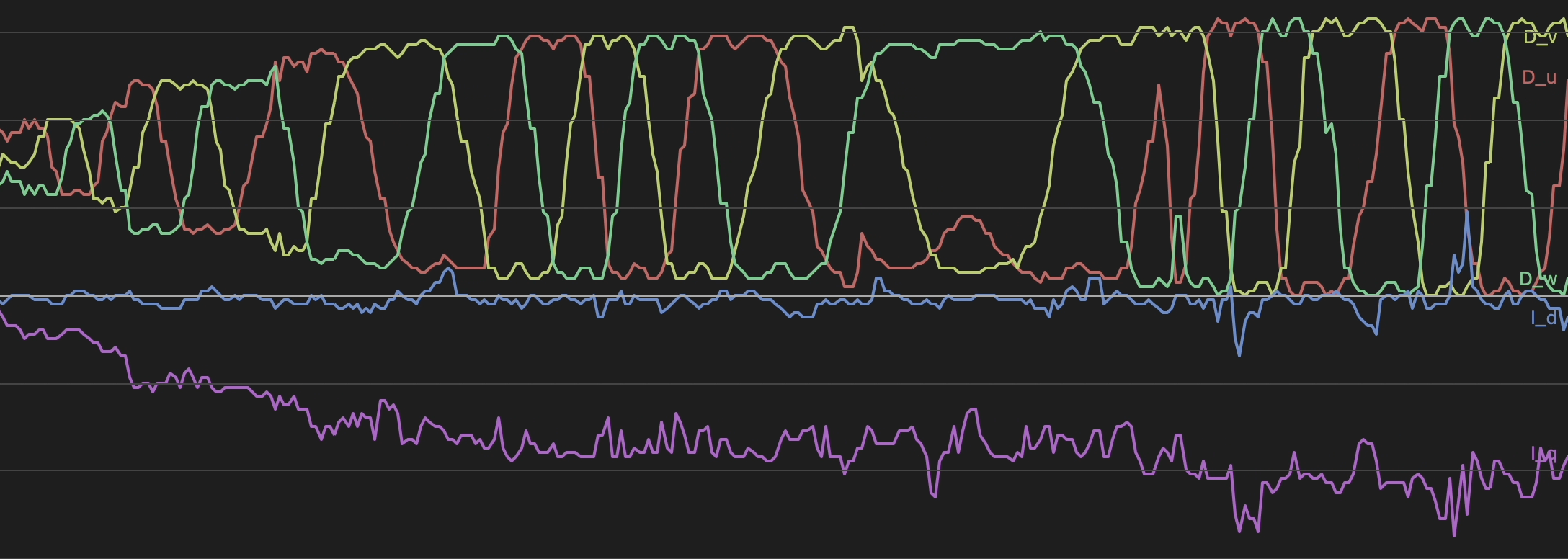
- Position, velocity, voltage, and current control over RS485
- Field oriented control (FOC)
- Temperature-dependent current limiting
Should be possible:
- 50A continuous, 110A peak phase current
Status: Currently working on other stuff, though I want to improve the current control loop in the future.







 Peter Walsh
Peter Walsh
 Yannick (Gigawipf)
Yannick (Gigawipf)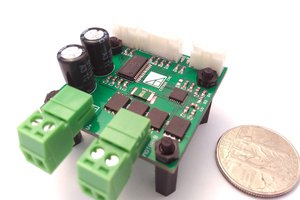
 ottoragam
ottoragam
 Anthrobotics
Anthrobotics
Hi! Nice work here! Would it be possible to control very small BLDC motors for robotic fingers?