lion mclionhead
lion mclionhead-
Jetson orin nano super dreams
12/18/2024 at 09:33 • 0 commentsThe $250 "Jetson orin nano super" dropped today. This one has 8GB RAM, 102GB/s memory bandwidth, 16 TFLOPS burning 25W.
The 1st generation $100 Nano that lions could afford had 4GB RAM, 25GB/s memory bandwidth, 472 GFLOPS burning 10W.
The "orin nano super" would probably be able to do all the pose estimation, rep counting & lion tracking with full 32 bit float & higher quality semantic segmentation algorithms. The months of dead ends porting operators to tensorrt & C++ would be over. Everything would run in python with no heroic optimization. It's unlikely manual C++ optimization would buy any frames per second.
The problem is 25W would significantly reduce the range. On a quad copter, it doesn't matter. On a highly efficient truck, the 10W were already reducing the range enough to get it bumped off the payload. The 25W could only run for a few minutes in a long drive.
-
Raspberry pi 5 vs jetson nano
04/04/2024 at 19:11 • 0 commentsThere are still too many cases of tensorrt detecting only the background & not the lion so there would be no way to deglitch that. Sometimes the lion hits are out of frame & sometimes the glitch hits are out of frame so testing for out of bounds coordinates wouldn't work.
model_inspect.py as a frame server started to appeal. It takes 3-4 minutes to start & requires a swap space but it goes at 12.5fps. inspector.py using a frozen model goes at 10.5fps. Not sure why there is such a difference between inspector.py + frozen model & model_inspect.py + checkpoint. It would be quite tedious to debug model_inspect.py.
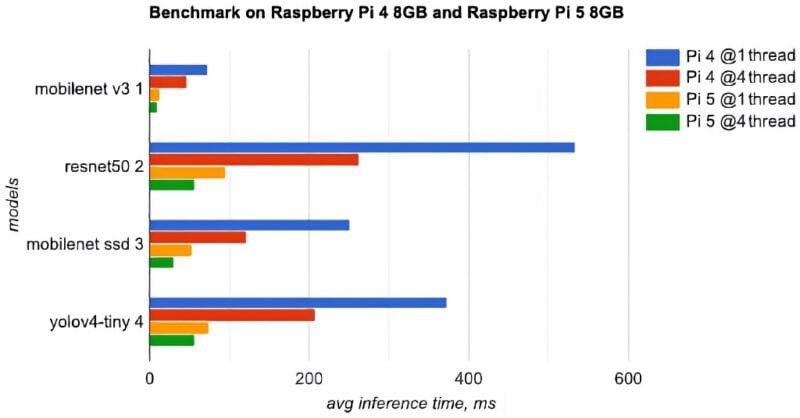
After 4 years out of production, the raspberry pi series resumed production in 2024 with the 5. At this point, a raspberry pi 5 would be vastly faster than the jetson nano as a tracking cam, start faster, take less space, use less power.
![]()
https://www.raspberrypi.com/news/benchmarking-raspberry-pi-5/
They show neural network benchmarks going at least 3x faster than the raspberry pi 4, so at least 24fps would be achieved. The jetson only hit 20fps with tensorrt efficientdet. Having invested most of 1.5 years on the jetson nano, it was time to move on.
-
Revisiting efficientdet-lite0 on tensorrt
11/27/2023 at 02:17 • 0 commentsIt was long believed if model_inspect.py could just test the tensorrt engine, it might narrow down the problem to the input format. Lately started thinking if it could work at all in model_inspect.py with the tensorrt engine, all the inferrence should stay in python & the rest of the program should communicate with shared memory. Python has a shared memory library.
Reviewing model_inspect.py again, all it does it ingest the efficientdet graph & the protobuf files, compile the tensorrt engine on the fly, & benchmark it. The compilation always failed. The way a tensorrt engine is loaded from a file in python is the same way it's done in C++ so it's not going to matter. The problem is the way it's being trained doesn't agree with an operator in tensorrt.
https://github.com/NobuoTsukamoto/benchmarks/blob/main/tensorrt/jetson/detection/README.md
The thing about these benchmarks is they were all done on the pretrained efficientdet checkpoint. It's unlikely anyone has ever gotten a home trained efficientdet to work on jetson nano tensorrt.
Given the difficulty with body_25 detecting trees, it might be worth using efficientdet on libcudnn. It might be possible to run a chroma key on the CPU while efficientdet runs on the GPU. The problem with that is it takes a swap space just to run efficientdet in libcudnn. There's not enough memory to do anything else.
The cheapest improvement might be a bare jetson orin module & plugging it into the nano dock. Helas, the docks are not compatible. The orin's M2 slot is on the opposite side. It doesn't have HDMI. Bolting on 360 cam & doing the tracking offline is going to be vastly cheaper than an orin, but it has to be lower & it needs a lens protector in frame. The weight of 360 cams & the protection for the lenses has always been the limiting factor with those.
The raspberry pi 5 8GB recently started being in stock. That would probably run efficientdet-lite0 just as fast as the jetson nano.
-------------------------------------------------------------------------------------------------------------------------------------------------
Efforts turned to making model_inspect.py some kind of image server & just feeding it frames through a socket. model_inspect.py has an option to export a saved model. Maybe that would start it faster & use less memory.
root@antiope:/root/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=saved_model --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0.1/ --hparams=../../efficientlion-lite0.1/config.yaml --saved_model_dir=../../efficientlion-lite0.saved
Then perform inference using the saved model
root@antiope:/root/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=saved_model_infer --saved_model_dir=../../efficientlion-lite0.saved --input_image=../../truckcam/lion320.jpg --output_image_dir=.
Helas, no difference in loading time or memory. It takes 3 minutes to start, which isn't practical in the field. Suspect most of that is spent swapping to a USB flash. The tensorRT version of efficientdet takes 20 seconds to load.
There is another inference program which uses a frozen model:
root@antiope:/root/automl/efficientdet/tf2% time OPENBLAS_CORETYPE=CORTEXA57 python3 inspector.py --mode=infer --model_name=efficientdet-lite0 --saved_model_dir=/root/efficientlion-lite0.out/efficientdet-lite0_frozen.pb --input_image=/root/truckcam/lion320c.jpg --output_image_dir=.
This takes 43 seconds to start & burns 2 gigs of RAM but the frame rate was only 10.5fps. body_25 on tensorrt did 6.5fps & efficientdet_lite0 on the raspberry pi 4 did 8.8fps. It could possibly do chroma keying in the CPU while efficientdet ran in the GPU.
------------------------------------------------------------------------------------------------------------------------------------------------------
Had to retrain new models since what was left after 2023 was no longer working. Notes about training:
https://hackaday.io/project/190480/log/221560-death-of-efficientdet-lite
https://hackaday.io/project/190480-jetson-tracking-cam/log/221020-efficientdet-dataset-hack
root@gpu:~/nn/yolov5# source YoloV5_VirEnv/bin/activate
root@gpu:~/nn/yolov5# python3 label.py
create training images:
root@gpu:~/nn/automl-master/efficientdet# PYTHONPATH=. python3 dataset/create_coco_tfrecord.py --image_dir=../../train_lion --object_annotations_file=../../train_lion/instances_train.json --output_file_prefix=../../train_lion/pascal --num_shards=10
create validation images:
root@gpu:~/nn/automl-master/efficientdet# PYTHONPATH=. python3 dataset/create_coco_tfrecord.py --image_dir=../../val_lion --object_annotations_file=../../val_lion/instances_val.json --output_file_prefix=../../val_lion/pascal --num_shards=10
It must be trained with a starting checkpoint or it won't detect anything. Train with a starting checkpoint specified by --ckpt because the model size won't match
root@gpu:~/nn/automl-master/efficientdet# time python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --model_dir=../../efficientlion-lite0 --ckpt=../../efficientdet-lite0 --train_batch_size=1 --num_examples_per_epoch=1000 --num_epochs=200 --hparams=config.yaml
Resume training without starting checkpoint:
root@gpu:~/nn/automl-master/efficientdet# time python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --model_dir=../../efficientlion-lite0 --train_batch_size=1 --num_examples_per_epoch=1000 --num_epochs=300 --hparams=config.yaml
Test inference on PC:
root@gpu:/root/nn/automl-master/efficientdet% time python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=lion320c.jpg --output_image_dir=.
Create frozen model on a PC:
root@gpu:~/nn/automl-master/efficientdet/tf2# PYTHONPATH=.:.. python3 inspector.py --mode=export --model_name=efficientdet-lite0 --model_dir=../../../efficientlion-lite0/ --saved_model_dir=../../../efficientlion-lite0.out --hparams=../../../efficientlion-lite0/config.yaml
Convert to ONNX on jetson nano:
root@antiope:/root/TensorRT/samples/python/efficientdet% time OPENBLAS_CORETYPE=CORTEXA57 python3 create_onnx.py --input_size="320,320" --saved_model=/root/efficientlion-lite0.out --onnx=/root/efficientlion-lite0.out/efficientlion-lite0.onnx
Had bad feelings about this warning but it might only apply to using the onnx runtime.
Warning: Unsupported operator EfficientNMS_TRT. No schema registered for this operator.
Warning: Unsupported operator EfficientNMS_TRT. No schema registered for this operator.Convert to tensorrt on jetson nano:
time /usr/src/tensorrt/bin/trtexec --fp16 --workspace=2048 --onnx=/root/efficientlion-lite0.out/efficientlion-lite0.onnx --saveEngine=/root/efficientlion-lite0.out/efficientlion-lite0.engine
Test inference on jetson nano:
root@antiope:/root/automl/efficientdet% swapon /dev/sda1
root@antiope:/root/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=../../truckcam/lion320c.jpg --output_image_dir=.
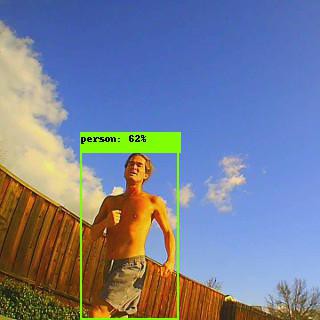
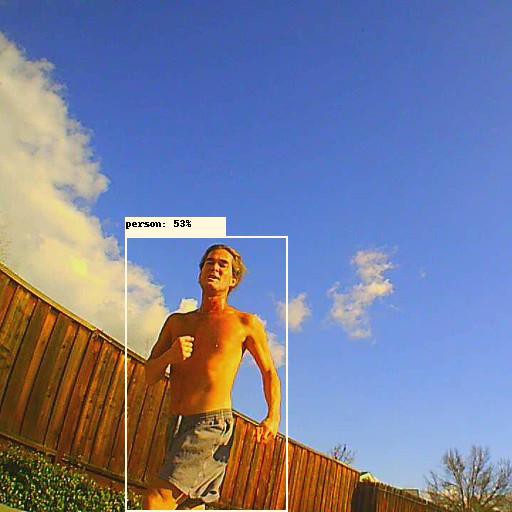
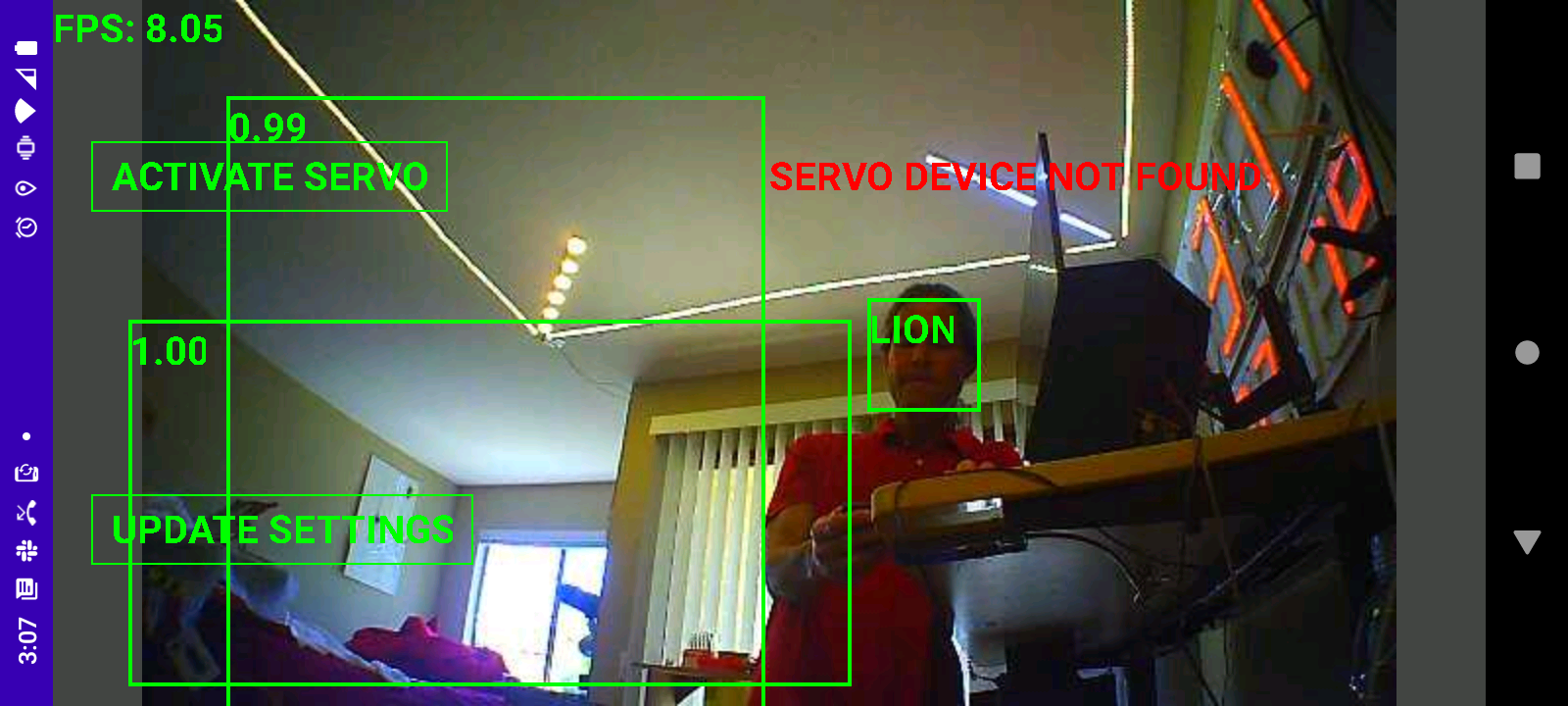
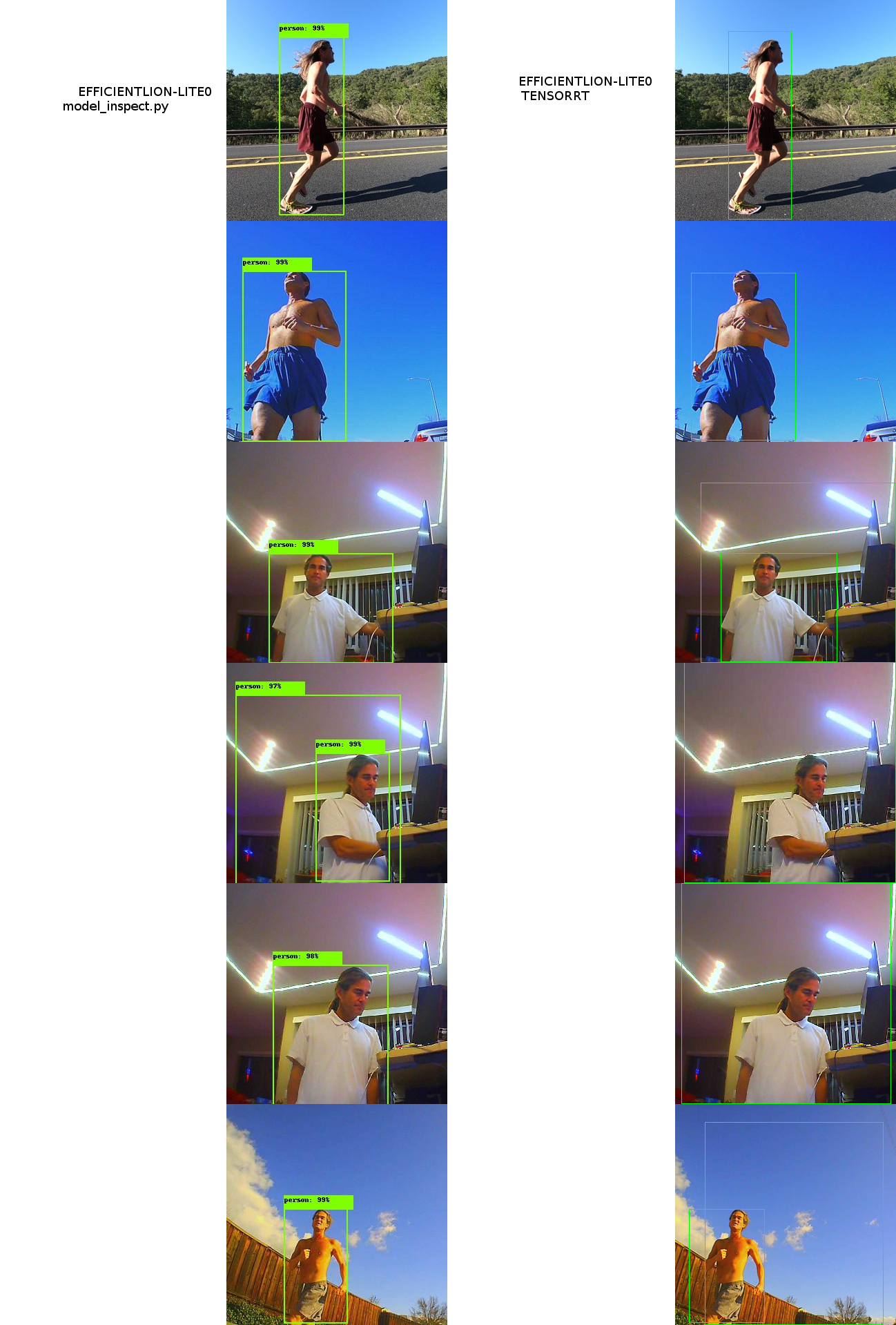
Ran another comparison of efficientdets & still found the cudnn backend working while the tensorrt backend was bad. Fenegling the min & max pixel values got tensorrt pretty close in the outdoor images but still failing on the indoor images. --noTF32 & --fp16 had the same errors.
![]()
![]()
The smoking gun in this has always been the goog model giving the same result in tensorrt while the lion one does not. Neither of the lion back ends are great indoors because the training data has no indoor images. The lion back ends seem pretty close in outdoor images but the tensorrt version falls apart in indoor images. There are slight improvements when using linear interpolation instead of nearest neighbor. The percentages are different when the goog model is run on tensorrt. 1 thing that might work is taking the overlapping area of all the boxes. Something about the training data is throwing off the lion model.
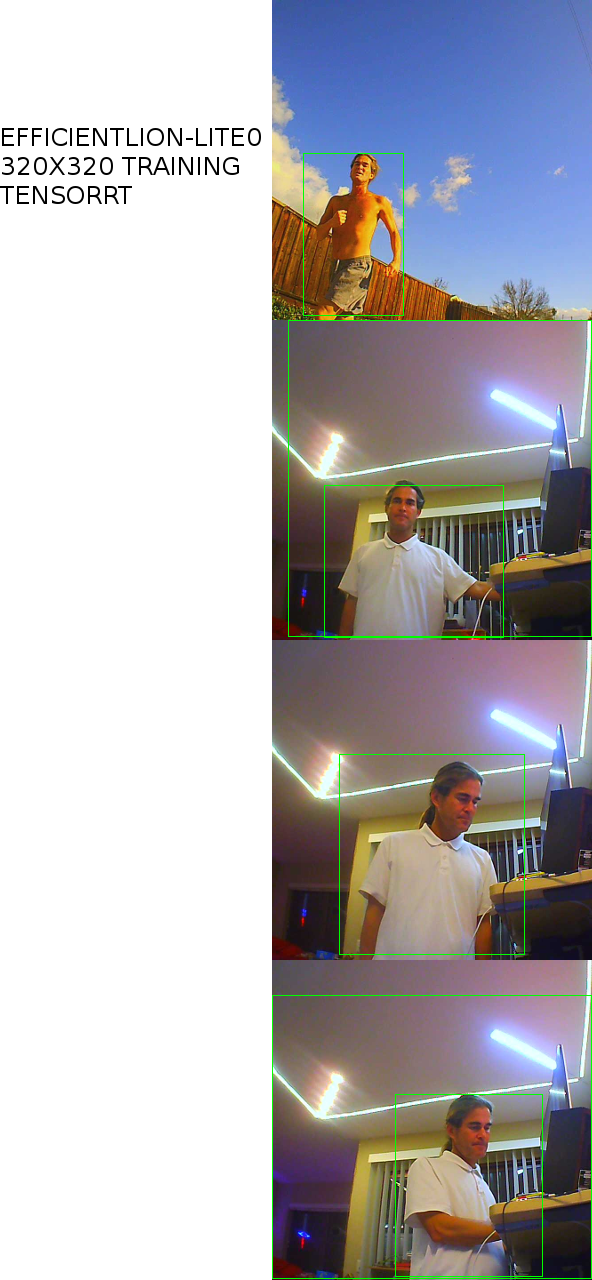
Tried training it with all the training images cropped to 320x320. Young lion didn't perform this test but did a failed test with animorphic aspect ratio.
![]()
That got it to detect all the trouble images within a somewhat reasonable error. The glitch boxes could probably be filtered out.
----------------------------------------------------------------------------------------------------------------------------------------------------------------
After all the fuss about tracking software, a much simpler camera system started gaining favor.
![]()
A rigid camera on a leash got better & better. It gives the most desirable angle. The mane flaw is it can't do any panning moves. A static camera angle is really boring.
-
Jetson body25 test
09/27/2023 at 07:39 • 0 comments![]()
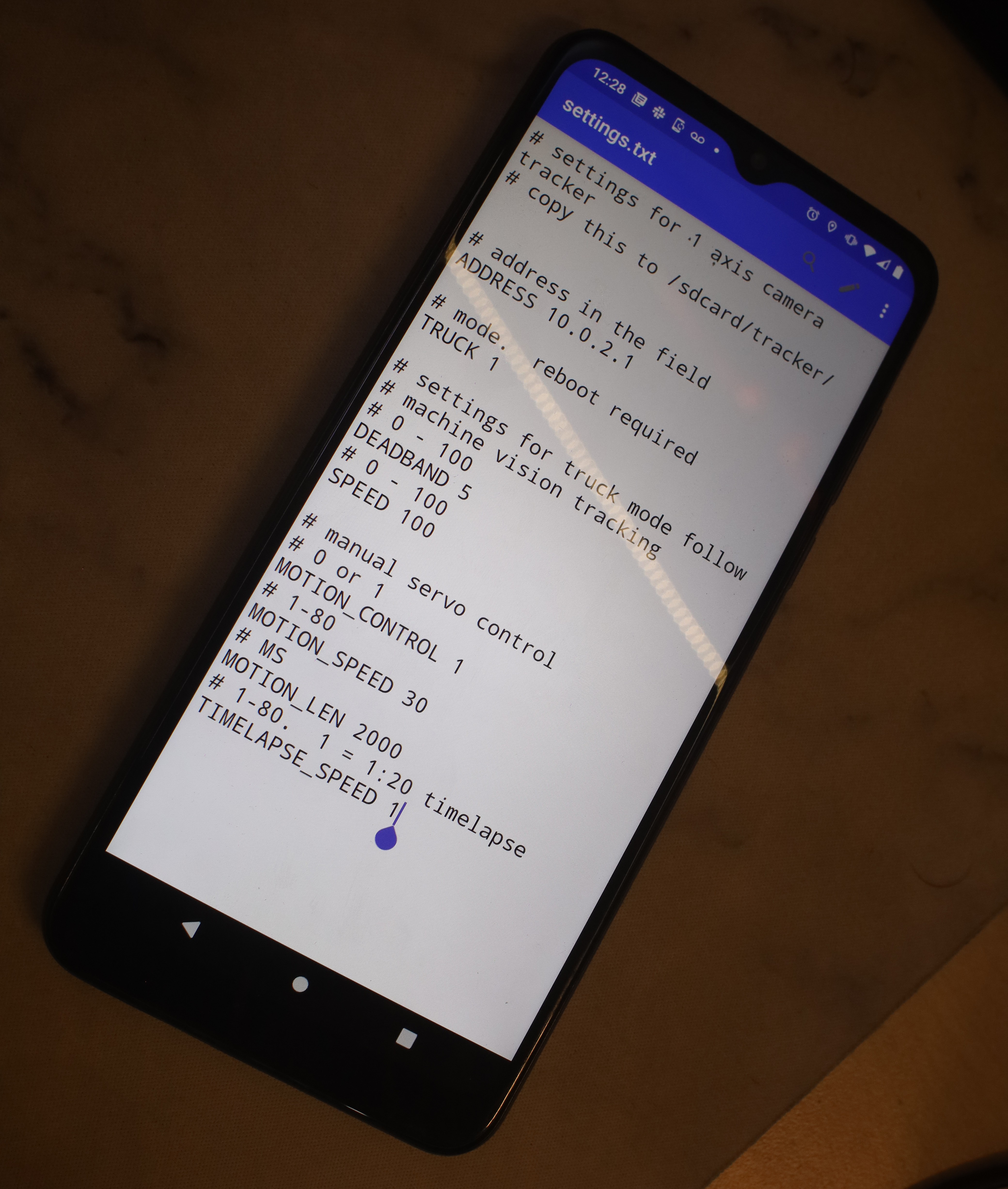
11 years of writing phone apps have convinced lions the best way to configure a phone app is a text file in a text editor.
So the tracking program being dual purpose required a configuration bit, if truck is 0 it reads configuration from the GUI. If truck is 1, it reads configuration from the text file. It seems easiest, since the 2 axis configuration depends on visual feedback on the GUI as the user manually moves the servos. The 1 axis configuration doesn't need any GUI feedback.
------------------------------------------------------------------------------------------------------------------------
Another test run detected more trees than lion. The COCO dataset all the pretrained models use seems to have animals who look like trees. Tracking always stopped short of the subject, possibly because the body_25 hit box is too wide.
Most tracked footage would be better off in manual mode. Tracking is only needed when the truck turns & when the lion moves relative to the truck. Most of the time, lions are in a fixed position relative to the truck.
Other than the auto tracker issue, the other problems were the camera remote needing a power switch protector, the camera receiver's long standing frequency hopping bug getting really debilitating when using motion control. Maybe it's worth putting in another switch or button to select motion control or manual control.
-------------------------------------------------------------------------------------------------------------------------------
The idea occurred of creating a separate color histogram for each body part & using the histograms of all the body parts to recognize a lion in a crowd. Multiple body parts could enhance the detection. There isn't going to be anything more reliable than color histograms & identification of any kind might just require wearing differentiating colors. It might be better off using a contour model.
When only 1 animal is visible, it could constantly update its histogram table.
Testing it is the real problem. Lions just aren't around crowds except very rare cases. They could deliberately walk around the shopping mall just for testing.
There was a new development in the announcement of a future raspberry pi 5. This one goes at 2.4Ghz, thus taking efficientdet-lite to 11fps & increasing the reserve for chroma keying. The jetson's power consumption & size have been disappointing. TensorRT has proven to be a waste of time.
-
Body_25 as a pure animal detector
09/07/2023 at 05:03 • 0 commentsShuffling source code back & forth for no reason, it became clear that when using body_25, the
https://hackaday.io/project/162944-auto-tracking-camera
2 axis tracker should just have a switch. It should flip between 1 & 2 axes. This would have to be set at startup & change a bunch of bits: 1 or 2 animals, 2 180 servos or 1 360 servo, webcam or HDMI converter. It seems best done through the phone configuration file & a reboot.
Body_25 gave slightly inferior test results than efficientdet, as a pure animal detector. The mane limitation is gives slightly more false negatives.
There might be some marginal improvement in using a jetson nano without face recognition rather than a raspberry pi without facial recognition, since it does a full frame at 7fps instead of 1/3 frame. Differentiation of animals remaned unsolved. A head detector rather than a face detector is what's needed. There is no head equivalent of facenet. If lions had the brain power to make a ground up model like that, a better jetson could be justified.
A head detector would be the ultimate animal tracker.
---------------------------------------------------------------------------------------------------------------
Unfortunately, the fiddly ADC values from the paw controller are used throughout the vision system.
Refactored the truckcam radio system to try to make the ADC values more sensible. It needs ADC values for deadband, auto centering & timelapse mode.
Verified the transmitter burns 50-100mA. Helas, not enough space was modeled in the enclosure to fit a newer, longer battery.
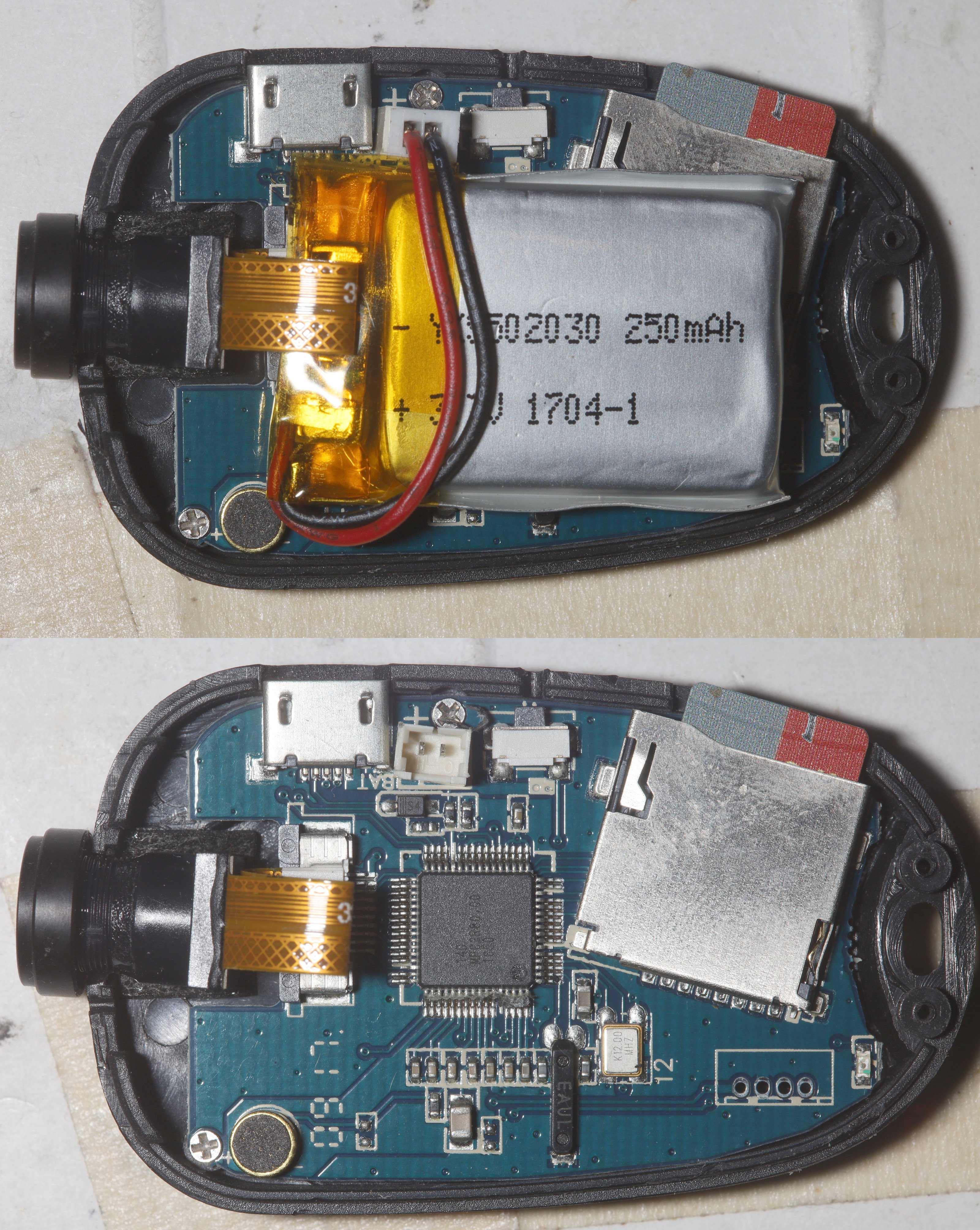
The mane problem is the keychain cam being a lot more fiddly on the jetson than it was on the raspberry pi.
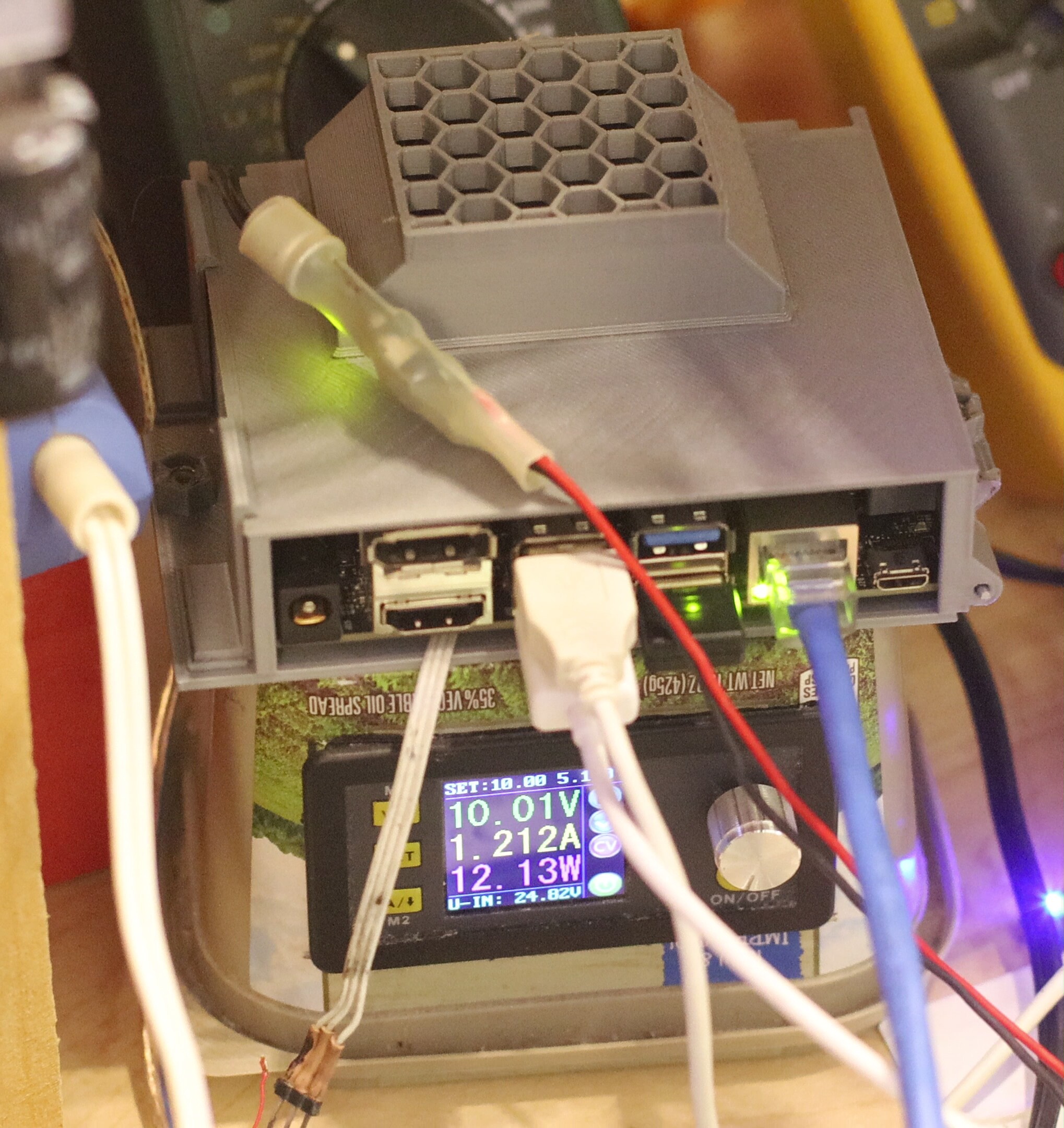
![]()
Took out the battery to get it to always start in the same state. The battery was still fully charged after 10 years. After much expansion of the status reporting, it got to where a user with a lot of practice could start it up with repeated pressing of the power button. Key needs are a status code instead of error bits. The status code should be updated once after running through each initialization attempt.
The good news is the power button can be used to turn off body_25 & save 5W without shutting down the jetson. It still burns 5W when idle though. The fully body_25 tracking system burns 11W.
It also sometimes starts at 1fps, then goes to 7fps after a few minutes.
Wifi doesn't always start on the jetson. Configuration definitely requires ssh from a phone. The phone can't connect to anything on wifi if mobile data is enabled. It gives itself a 192.0.0.0 address while the jetson is a 10.0.10.0 address.
Initialization is so fiddly, the 2 axis & 1 axis trackers should all use the 2 axis codebase instead of separate codebases.
All the subsystems required for tracking still don't cover the mechanical changes.
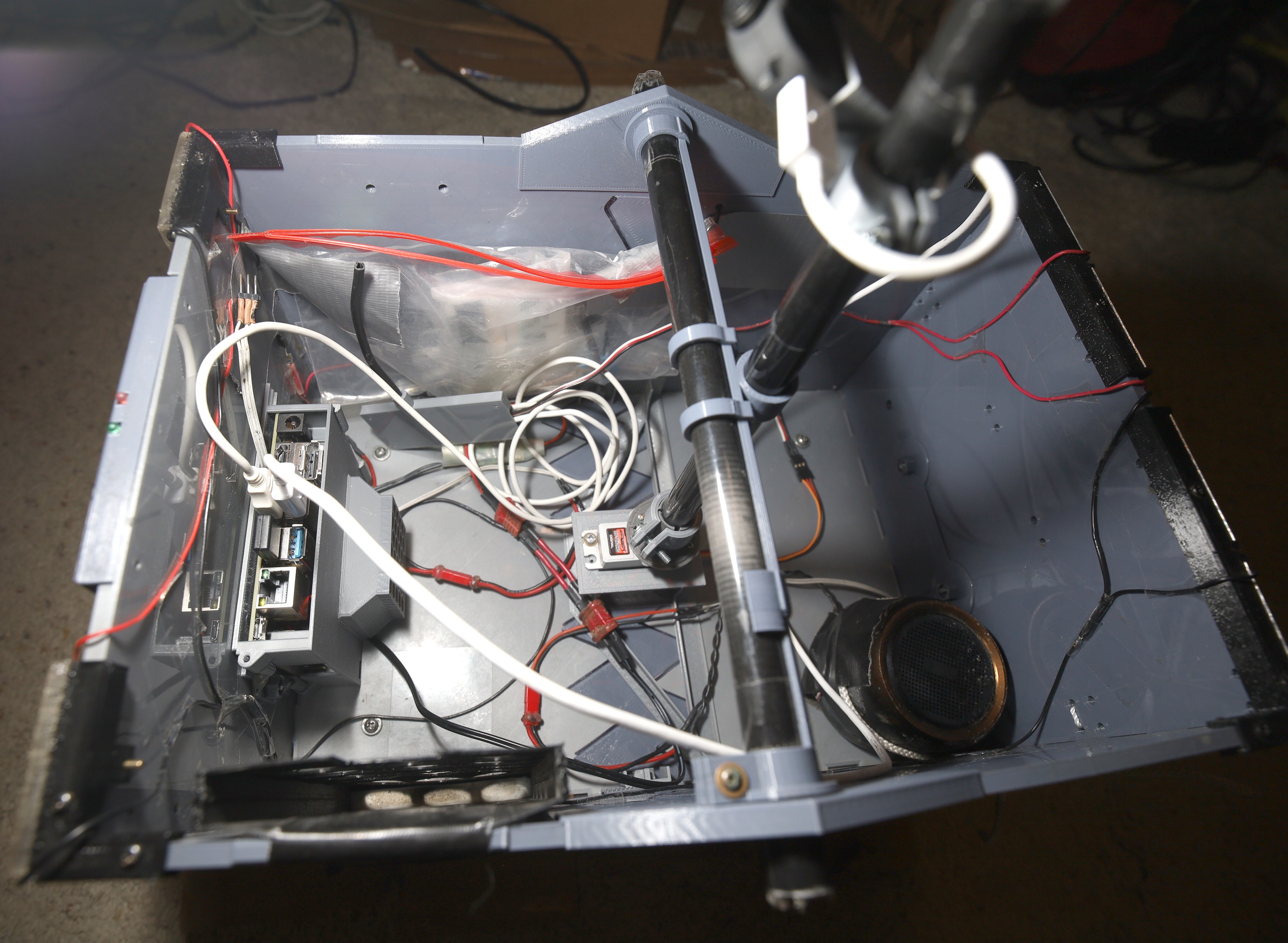
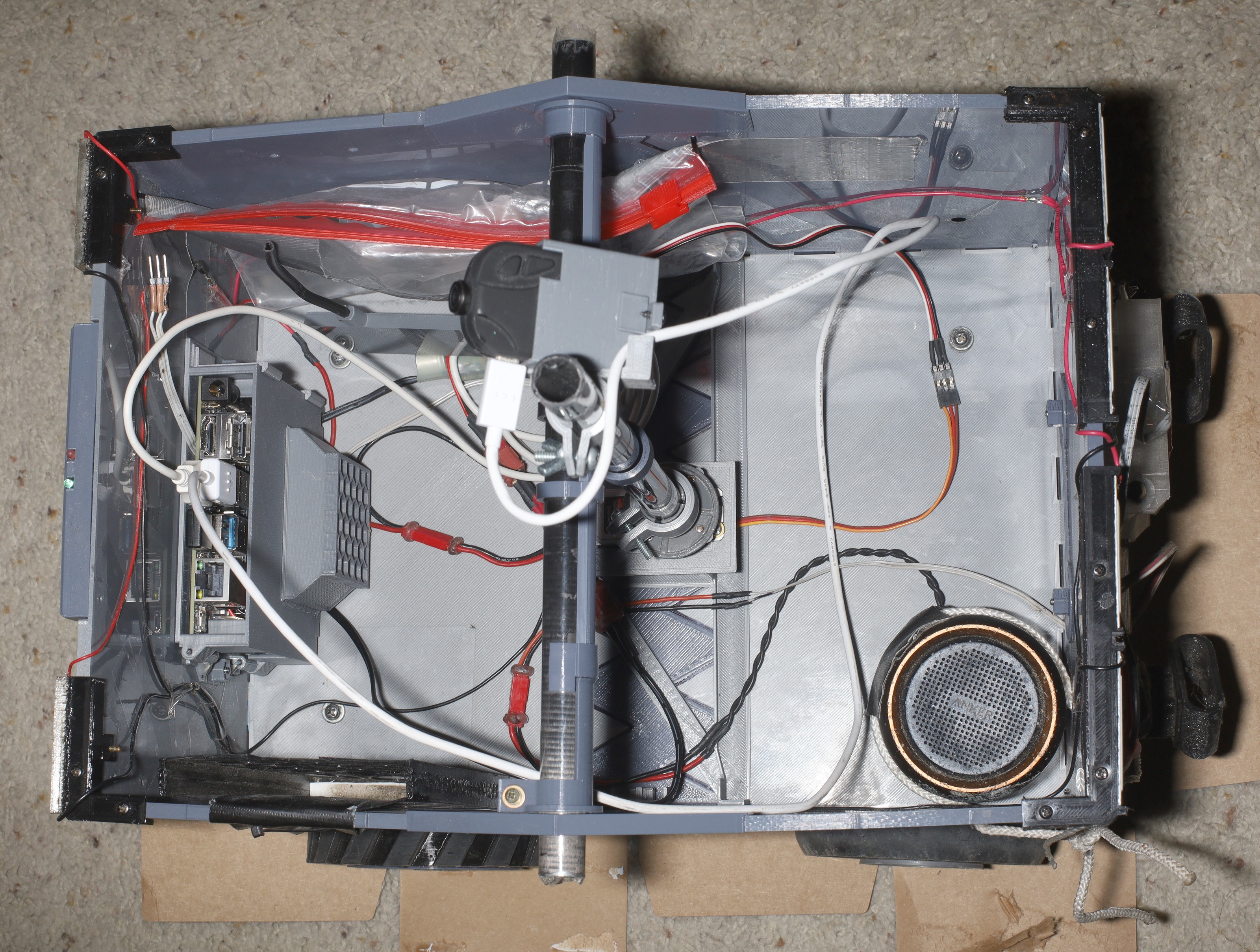
![]()
![]()
![]()
![]()
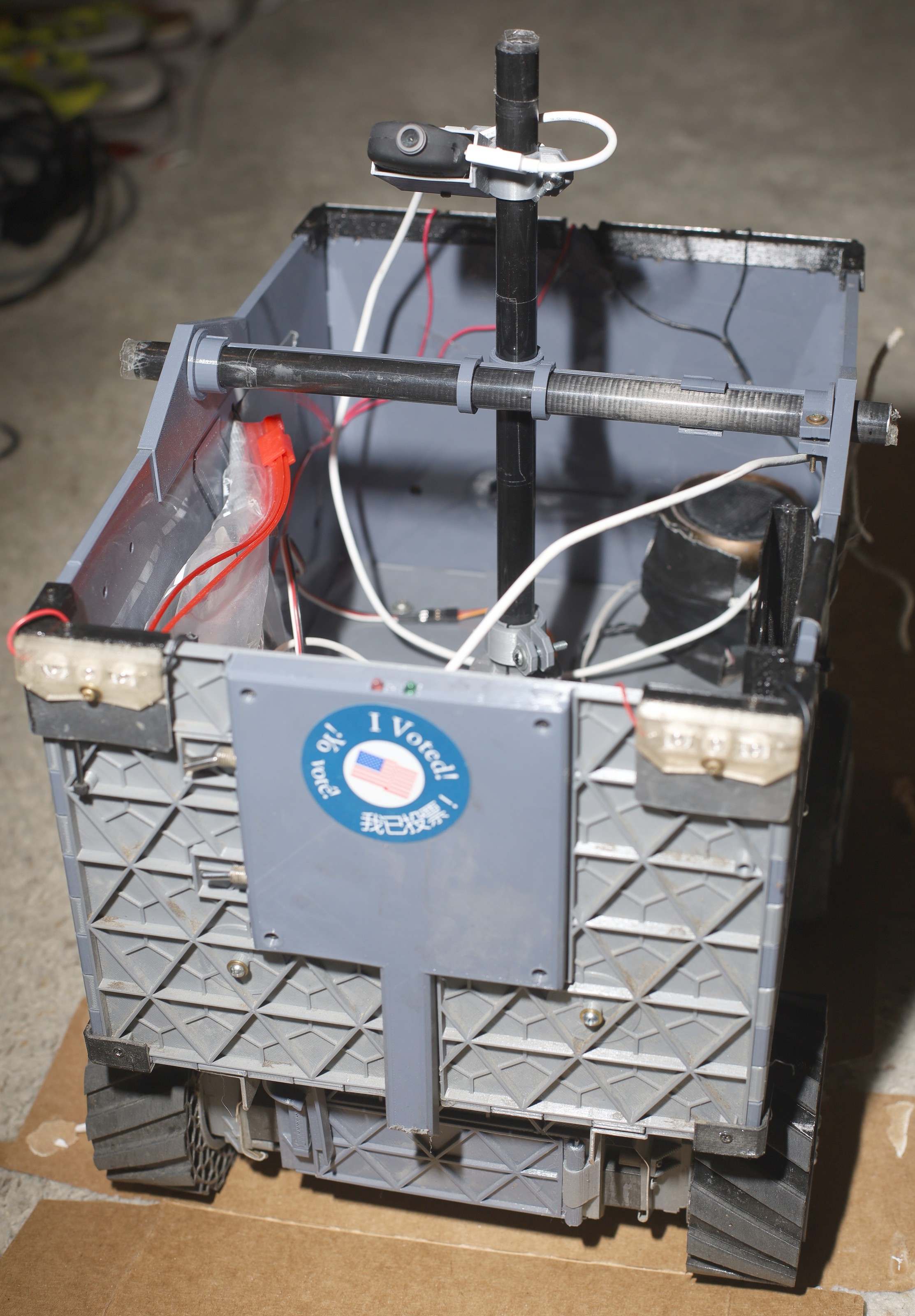
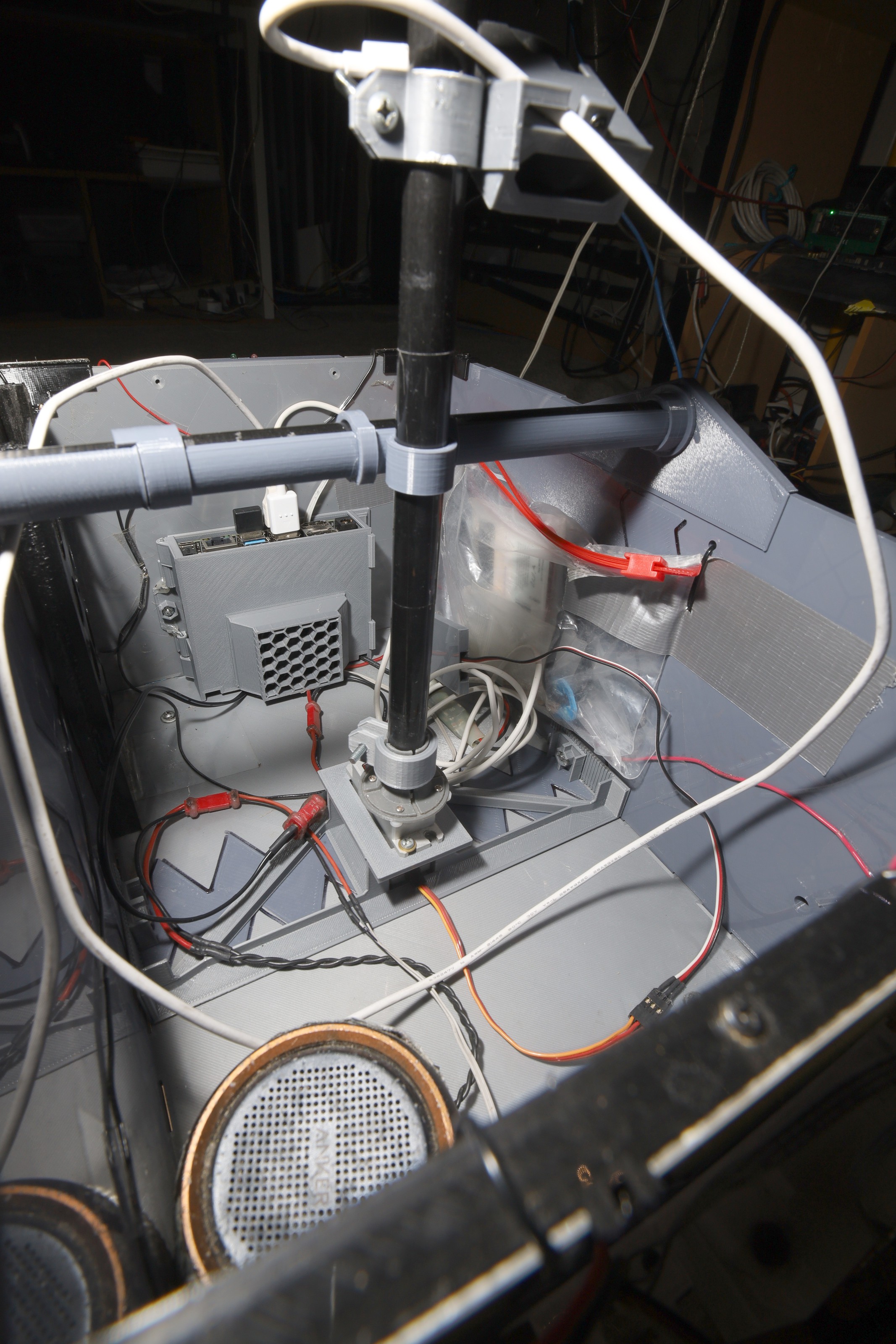
The latest thinking was to bolt the jetson on the truck. If it gets run over, it's a $150 paperweight & lions won't be inclined to burn $500 on a higher end model. There's still a chance of letting it flop around in a padded enclosure. It's a lot bigger than the raspberry pi. Nothing is stopping a string from reinforcing the handle & it might be necessary for the 'pro.
The 1st test was for tracking robustness without the 'pro. The limitations of USB wifi & phone app restrictions make screencaps no longer a viable way of debugging the tracker. There are definitely problems with task switching the app & frames getting split.
![]()
![]()
Still prone to detecting trees like efficientdet. Generally less false positives & more robust than efficientdet. Had no cases of it actually chasing the wrong subject like efficientdet had. It suffers from false negatives the same way face detection did. Being able to scan a full frame at a time is definitely helping.
Nothing is as good as a custom trained efficientdet at 21fps, but not being able to run a custom trained model on the jetson & not having a head recognizer make body_25 a viable alternative.
Since the webcam got lighter & we're not tracking heads, there is a desire to move it higher up again & angle it lower. Past experience showed body_25 does better when the head is visible though. There might be a more flexible USB cable. The camera should always be in front of the handle now, since the confuser is always in back. All that iron & computing brought the power up to 400mAh/mile.
![]()
The castle creations 6 was flaming hot.
-
Death of efficientdet lite
07/27/2023 at 21:45 • 0 commentsIt became clear the jetson isn't viable unless it matches the frame rate & robustness of the raspberry pi. After the experiments with SSD mobilenet, trt_pose, body_25, efficientdet remanes the only model which can do the job. The problem is debugging intermediate layers of the tensorrt engine. The leading method is declaring the layers as outputs in model_inspect.py so the change applies to the working model_inspect inference & the broken tensorrt inference.
This began with a ground up retraining of efficientdet with a fresh dataset.
root@gpu:~/nn/yolov5# python3 label.py
root@gpu:~/nn/automl-master/efficientdet# PYTHONPATH=. python3 dataset/create_coco_tfrecord.py --image_dir=../../train_lion --object_annotations_file=../../train_lion/instances_train.json --output_file_prefix=../../train_lion/pascal --num_shards=10
root@gpu:~/nn/automl-master/efficientdet# python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --model_dir=../../efficientlion-lite0 --train_batch_size=1 --num_examples_per_epoch=1000 --num_epochs=100 --hparams=config.yaml
Noted the graphsurgeon hack
https://hackaday.io/project/190480-jetson-tracking-cam/log/221260-more-efficientdet-attempts
to convert int64 weights to int32 caused a bunch of invalid dimensions.
StatefulPartitionedCall/concat_1 (Concat) Inputs: [ Variable (StatefulPartitionedCall/Reshape_1:0): (shape=[61851824029695], dtype=float32) Variable (StatefulPartitionedCall/Reshape_3:0): (shape=[15466177232895], dtype=float32) Variable (StatefulPartitionedCall/Reshape_5:0): (shape=[3869765533695], dtype=float32) Variable (StatefulPartitionedCall/Reshape_7:0): (shape=[970662608895], dtype=float32) Variable (StatefulPartitionedCall/Reshape_9:0): (shape=[352187318271], dtype=float32) ] Outputs: [ Variable (StatefulPartitionedCall/concat_1:0): (shape=None, dtype=float32) ]The correct output was:
StatefulPartitionedCall/concat_1 (Concat) Inputs: [ Variable (StatefulPartitionedCall/Reshape_1:0): (shape=[None, 14400, 4], dtype=float32) Variable (StatefulPartitionedCall/Reshape_3:0): (shape=[None, 3600, 4], dtype=float32) Variable (StatefulPartitionedCall/Reshape_5:0): (shape=[None, 900, 4], dtype=float32) Variable (StatefulPartitionedCall/Reshape_7:0): (shape=[None, 225, 4], dtype=float32) Variable (StatefulPartitionedCall/Reshape_9:0): (shape=[None, 81, 4], dtype=float32) ] Outputs: [ Variable (StatefulPartitionedCall/concat_1:0): (shape=[None, 19206, 4], dtype=float32) ]That didn't fix the output of course.
------------------------------------------------------------------------------------------------------------------------
There are no tools for visualizing a tensorrt engine.
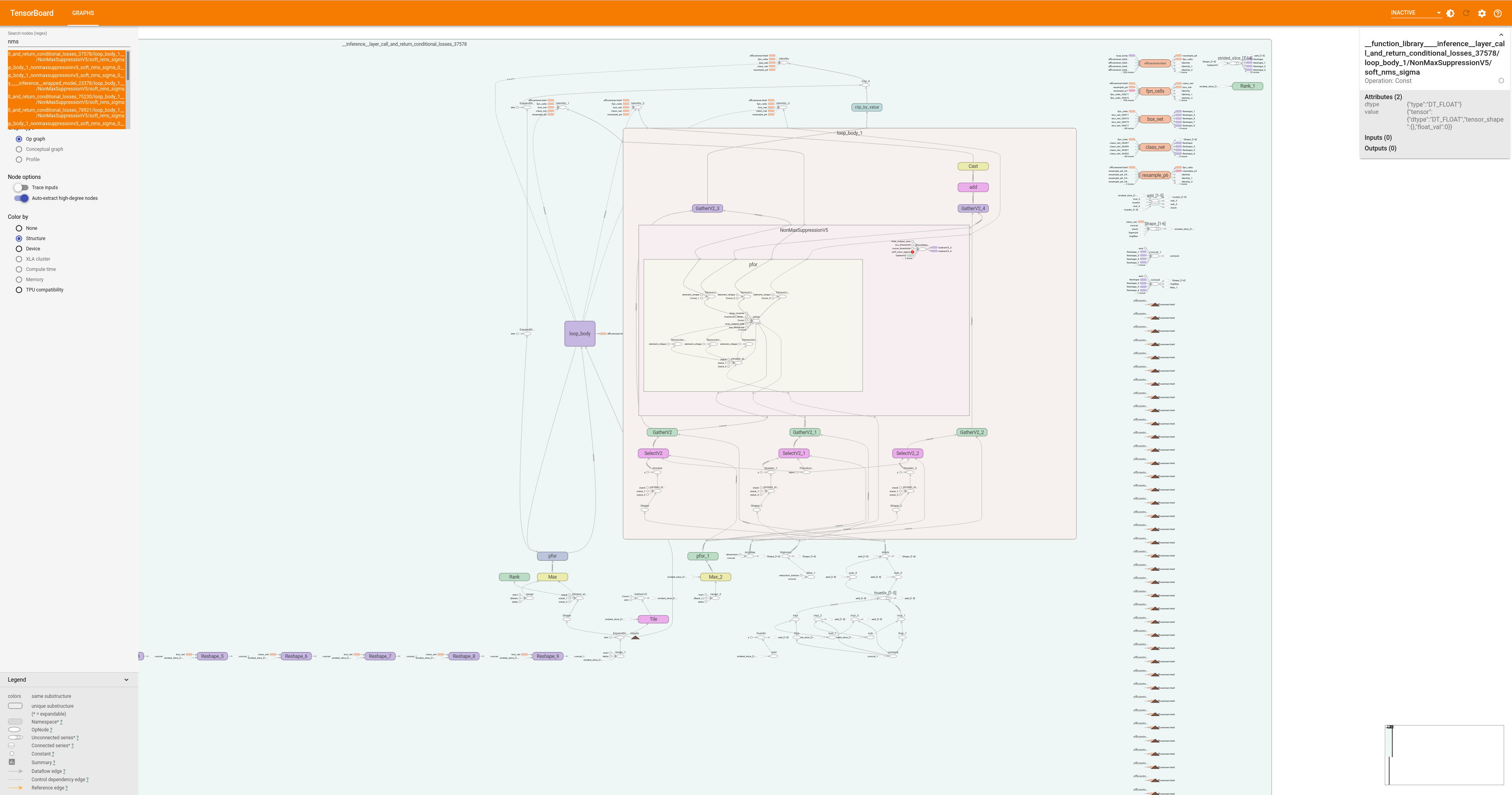
There is a way to visualize the frozen model on tensorboard. After a bunch of hacky, undocumented commands
OPENBLAS_CORETYPE=CORTEX57 python3 /usr/local/lib/python3.6/dist-packages/tensorflow/python/tools/import_pb_to_tensorboard.py --model_dir ~/efficientlion-lite0.out --log_dir log
OPENBLAS_CORETYPE=CORTEX57 tensorboard --logdir=log --bind_all
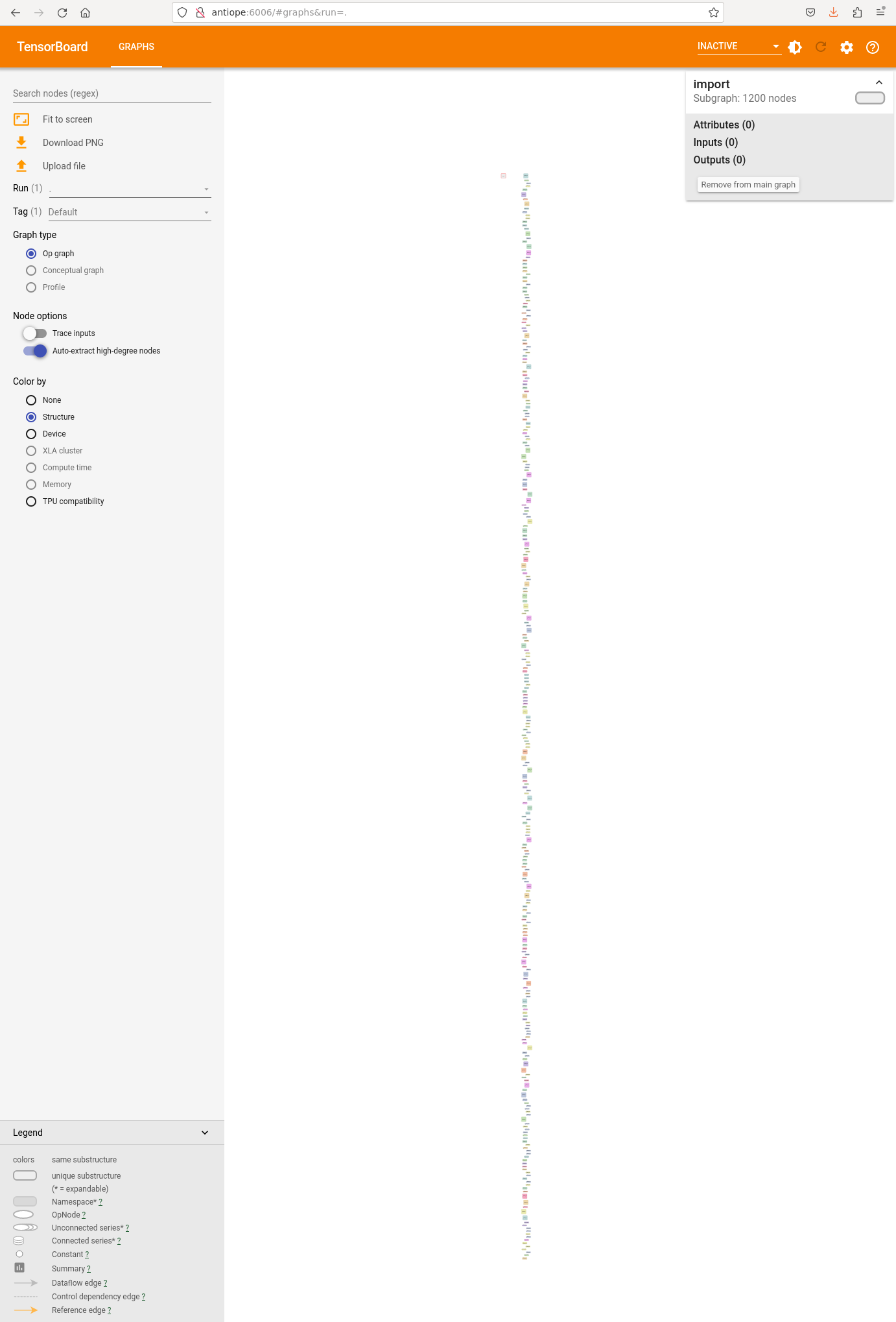
![]()
It shows a pretty useless string of disconnected nodes.
![]()
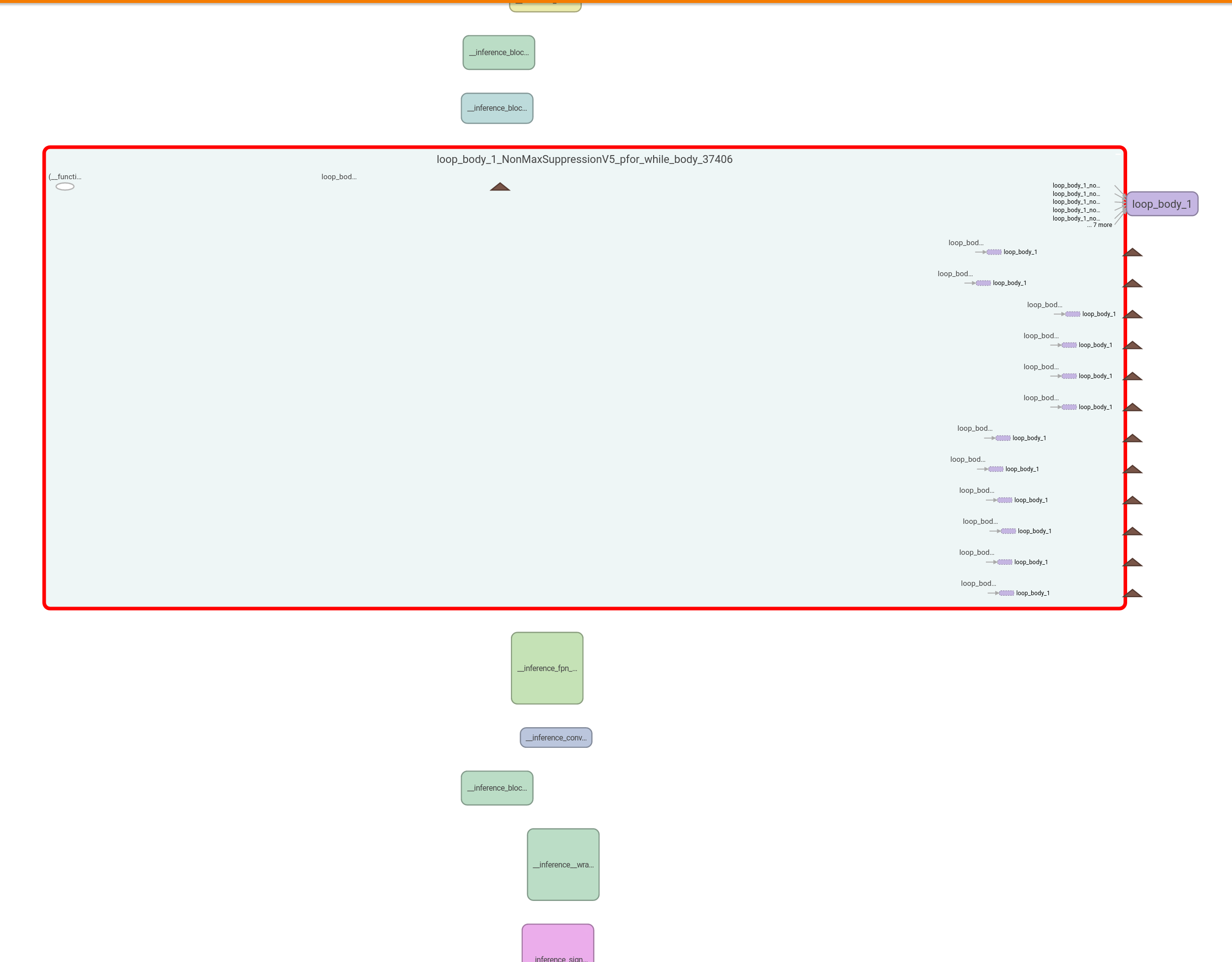
You're supposed to recursively double click on nodes to get the operators.
![]()
There's a minimal search function. It merely confirmed the 2 models have the same structure, as graphsurgeon already showed. The problem was the weights.
So a simple weight dumper truckcam/dumpweights.py showed pretrained efficientdet-lite0 to have some weights which were a lot bigger than efficientlion-lite0 but both models were otherwise in equivalent ranges. There were no Nan's. It was previously shown that fp32 & fp16 failed equally in tensorrt. It couldn't be the conversion of the weights to fp16.
------------------------------------------------------------------------------
The input was the only possible failure point seen. The best chance of success was seen as dumping the raw input being fed by model_inspect.py but there were no obvious ways to access that data in python. All the ideas from chatgpt failed.
Another idea was to feed model_inspect.py the precompiled efficientlion engine. model_inspect.py has a tensorrt benchmarking mode, but it can't compile the engine. If it ran a precompiled engine, it could prove the input was the problem.
At best, face detection wasn't going to be very functional on the jetson because the camera angle was too oblique. The only thing the jetson would offer was a higher efficientdet frame rate, but the raspberry pi was doing pretty well with only 7fps. Without face tracking, the jetson could use its port of body_25. Body_25 was possible because its interface was in C & that allowed low level access to the input data.
That would require comparing robustness of body_25 on the jetson to robustness of efficientdet on the raspberry pi. Body_25 can scan the full frame at 10Hz. Efficientdet can scan only 1/3 frame at 7Hz.
The decision was made to declare custom efficientdet non functional on the jetson nano & possibly compare efficientdet on the raspberry pi to body_25 on the jetson.
-
SSD mobilenet V2
07/21/2023 at 19:01 • 0 commentsCustom efficientdet was officially busted on the jetson nano & it was time to try other models. The attraction to efficientdet might have been the speed of the .tflite model on the raspberry pi, the ease of training it with modelmaker.py & that it was just a hair away from working on the jetson, but it just couldn't get past the final step.
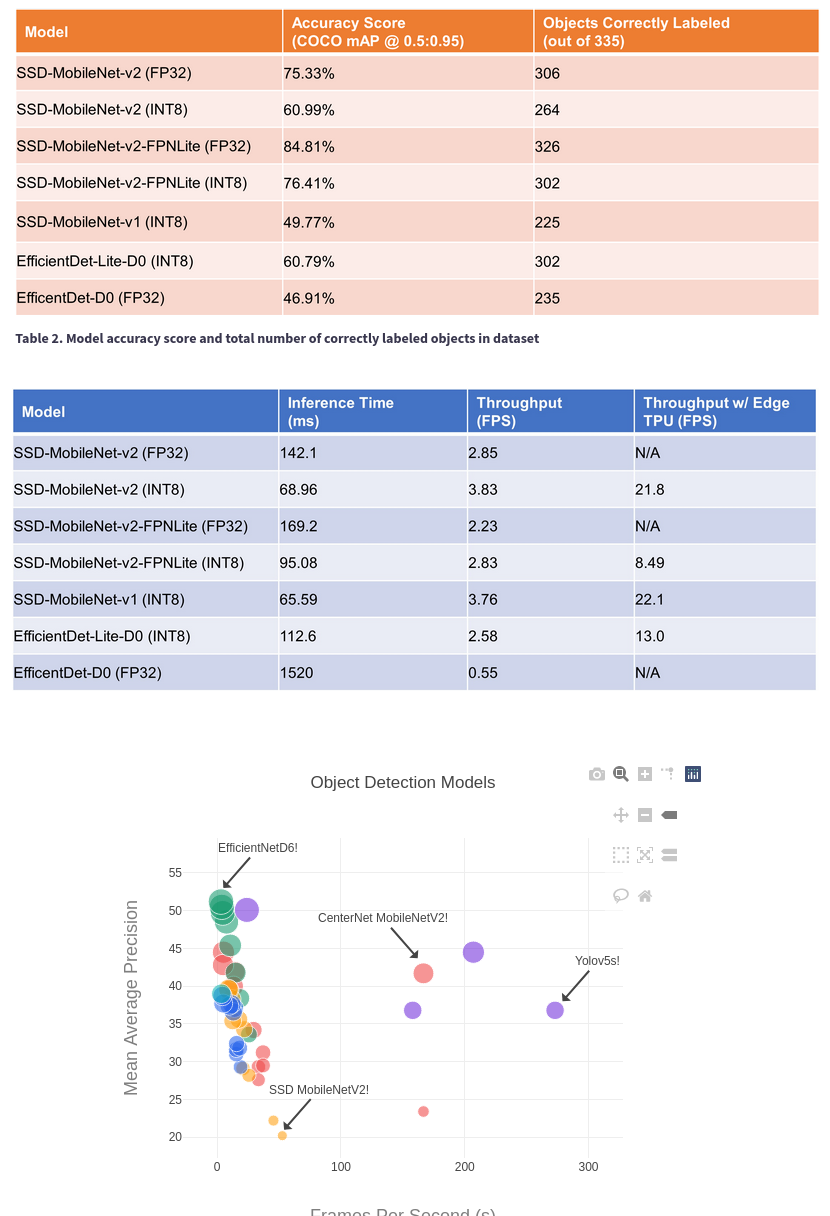
The original jetbot demo used ssd mobilenet v2. That was the cutoff point for the jetson nano. SSD mobilenet seems to be enjoying more recent coverage on the gootubes than efficientdet because no-one can afford anything newer. Dusty guy showed it going at 22fps. The benchmarks are all over the place.
![]()
It depends on data type, data set, & back end. Everything at a given frame rate & resolution seems to be equivalent.
Dusty guy created some documentation about training ssd mobilenet for the jetson nano.
https://github.com/dusty-nv/jetson-inference/blob/master/docs/pytorch-ssd.md
He continued to document a variety of different models on the newer jetson products until 2021.
https://github.com/dusty-nv/jetson-inference/tree/master
They disabled video commenting right after the lion kingdom tuned in. The woodgrain room is in Pennsylvania. Feels like the jetson line is generally on its way out because newer single board computers are catching up. The jetson nano is 1.5x faster in FP32, 3x faster in FP16, than a raspberry pi 4 in INT8.
Sticking to just jetson nano models shown in the video series seems to be the key to success. There's no mention of efficientdet anywhere. Noted he trained ssd mobilenet on the jetson orin itself. That would be a rough go on the nano. Gave efficientdet training a go on the jetson.
root@antiope:~/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --model_dir=../../efficientlion-lite0.jetson --ckpt=../../efficientdet-lite0 --train_batch_size=1 --num_examples_per_epoch=1000 --hparams=config.yaml
It needed a commented out deterministic option, but ran at 1 epoch every 15 minutes. It would take 3 days for 300 epochs or 17 hours for 66 epochs. The GTX 970M ran at 2 minutes per epoch. Giving it a trained starting checkpoint is essential to reduce the number of epochs, but it has to be the same number of classes or it crashes. The swap space thrashes like mad during this process.
After 80 epochs, the result was exactly the same failed hit on tensorrt & good hit on model_inspect.py, so scratch the training computer as the reason.
--------------------------------------------------------------------------------------------
https://github.com/dusty-nv/jetson-inference/blob/master/docs/pytorch-ssd.md
SSD mobilenet has a new dance for the training set. The annotations have to be in files called sub-train-annotations-bbox.csv, sub-test-annotations-bbox.csv The jpg images have to be in subdirectories called train & test. As an extra twist, train_ssd.py flipped the validation & test filenames.
Label.py needs train_lion/train, train_lion/test directories
Then it needs CSV_ANNOTATION = True
Then there's a command for training
python3 train_ssd.py --data=../train_lion/ --model-dir=models/lion --batch-size=1 --epochs=300
This one doesn't have an easy way of disabling the val step. It needs vals to show what epoch was the best. At least it's fast in the GTX 970. Then the ONNX conversion is fast.
python3 onnx_export.py --model-dir=models/lionThis picks the lowest loss epoch which ended up being 82.
time /usr/src/tensorrt/bin/trtexec --fp16 --workspace=2048 --onnx=/root/ssd-mobilenet.onnx --saveEngine=/root/ssd-mobilenet.engineThe input resolution is only 300x300. Helas, inference in C++ is an involved process described in
https://github.com/dusty-nv/jetson-inference/blob/master/c/detectNet.cpp
https://github.com/dusty-nv/jetson-inference/blob/master/examples/detectnet/detectnet.cppDumponnx.py gives the inputs & outputs.
Variable (input_0): (shape=[1, 3, 300, 300], dtype=float32)
Variable (scores): (shape=[1, 3000, 2], dtype=float32)
Variable (boxes): (shape=[1, 3000, 4], dtype=float32)
Lions have learned 1,3,300,300 is planar RGB & 1,300,300,3 is packed RGB.
detectNet.cpp supports many models. detectNet::postProcessSSD_ONNX was the one for SSD mobilenet.
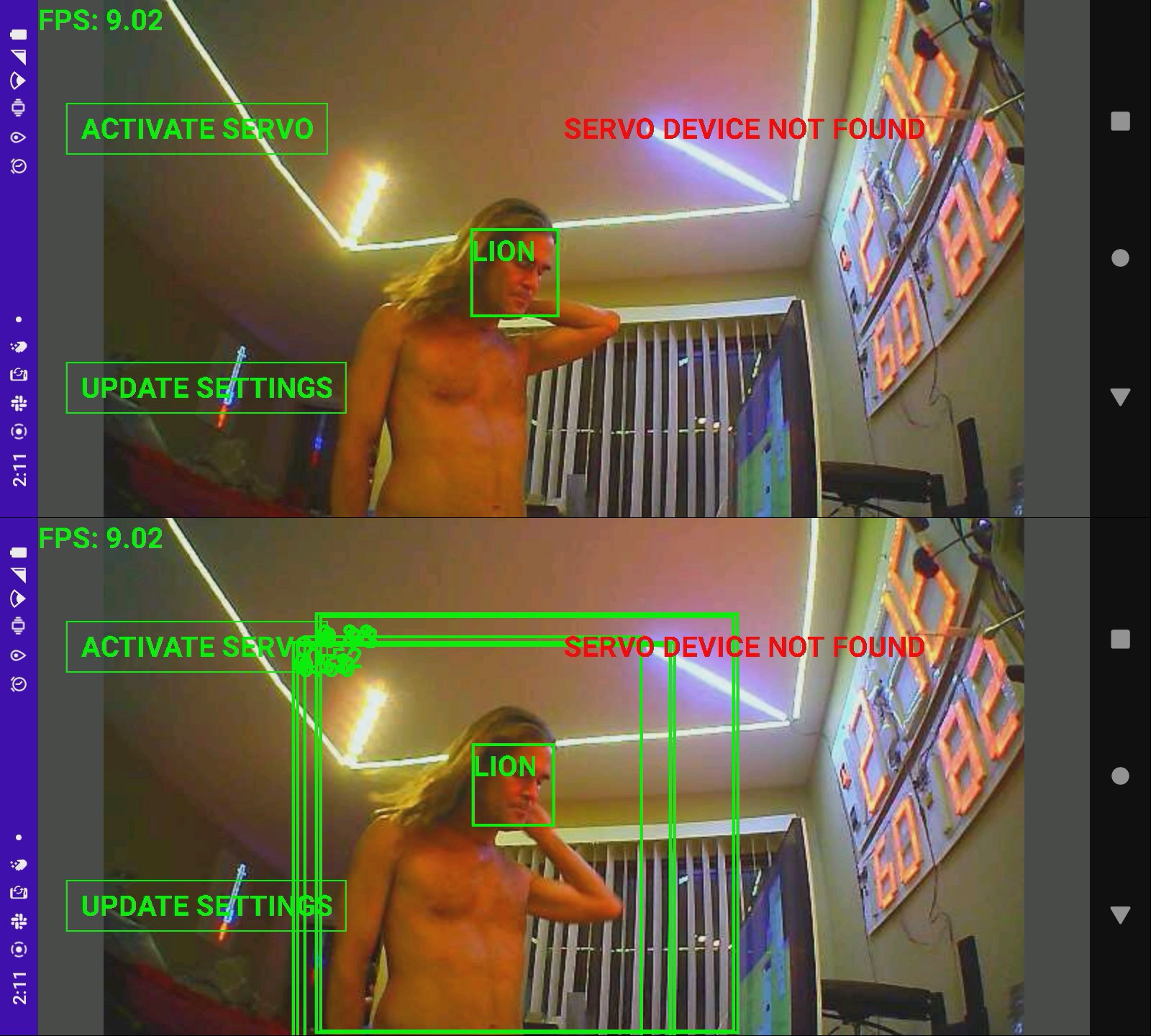
![]()
Results with the custom dataset were pretty unsatisfying, worse than pretrained efficientdet, but went at 40fps. This one could scan 2/3 of every frame. Some filtering is required to erase a bunch of overlapping hits, adapt the minimum score. Sometimes it doesn't get any hits at all. The scores are highly erratic. Sometimes they're all above 0.9. Sometimes they're all above 0.5. Normalization was critical. It might benefit from several normalization passes.
Using a model that was officially ported to the jetson nano was so much faster & easier than the 3rd party models, it might be worth trying their official posenet instead of an object detector. Lions previously documented it going at 12fps as TRT_POSE. That would convert to 5fps with face detection. Others on the gootube didn't even get it going that fast.
-
More efficientdet attempts
07/16/2023 at 21:47 • 0 comments![]() More testing with pretrained efficientdet-lite0. It's already known that this model hits trees & light posts.
More testing with pretrained efficientdet-lite0. It's already known that this model hits trees & light posts.
Finally made a script to go from checkpoint to trt engine in truckcam/det2trt.sh
It takes 46 minutes on the jetson, but there's no way to cross compile a trt engine.
Decided to try just 1 epoch of training.root@gpu:/root/nn/automl-master/efficientdet% python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --ckpt=../../efficientdet-lite0 --model_dir=../../efficientlion-lite0 --train_batch_size=1 --num_examples_per_epoch=1000 --num_epochs=1 --hparams=config.yaml
![]()
A most unexpected result where the original efficientdet-lite0 hit was still hitting while 2 more hits appeared, corresponding to the failed efficientlion-lite0. Ran the checkpoint with model_inspect.pyroot@antiope:/root/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0.1/ --hparams=../../efficientlion-lite0.1/config.yaml --input_image=../../truckcam/lion320.jpg --output_image_dir=.
![]()
This was the 1st time model_inspect.py showed the same evolution of failures as tensorrt. There's an evolution of the weights where they 1st deviate & eventually converge on the new data set.
Passing an efficientdet-lite0 checkpoint as the starting checkpoint shouldn't work because the num_classes changed. The next idea was training with the same num_classes so the onnx files would be easier to compare.
Right away, the pretrained efficientdet-lite0 had 90 classes instead of any previous number. The efficientdet-lite0 example was trained on the COCO dataset, but they didn't provide the config.yaml or dataset for that training.
python3 main.py --mode=train --train_file_pattern=../../train_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --ckpt=../../efficientdet-lite0 --model_dir=../../efficientlion-lite0.21 --train_batch_size=1 --num_examples_per_epoch=1000 --hparams=config.yaml
config.yaml:
num_classes: 90 num_epochs: 300
The 2 models now had the same dimensions, same number of symbols, but just different symbol names.
Epoch 1 was less degraded, but epoch 33 was as bad as every other conversion on tensorrt
-----------------------------------------------
Mean subtracting the input images improved the results but dividing by stddev_rgb degraded results in truckcam. Noted it was mean subtracting & stddev dividing in model_inspect.py but this wasn't the reason it worked.
---------------------------------
Another change was in TensorRT/samples/python/efficientdet/create_onnx.py
# tensorrt doesn't support # shape_corrected = np.asarray([-1, volume, shape_out[2]], dtype=np.int64) shape_corrected = np.asarray([-1, volume, shape_out[2]], dtype=np.int32)This got rid of the dreaded Your ONNX model has been generated with INT64 weights, while TensorRT does not natively support INT64
Sadly this was not the cause of the malfunction.
--------------------------------------------
Gave tf2onnx another try instead of TensorRT/samples/python/efficientdet/create_onnx.py.
python3 -m tf2onnx.convert --saved-model=efficientlion-lite0.out/ --output=efficientlion-lite0.out/efficientlion-lite0.onnx --opset=11
The lion kingdom's x86 box got trashed by a failed pip install. It now failed with the dreaded
AttributeError: module 'numpy' has no attribute 'object'.
or
KeyError: dtype('O')
A 20 minute conversion on the jetson yielded
Unsupported ONNX data type: UINT8 (2)
or
Assertion weights.type() == DataType::kINT32 failed.
tf2onnx seems to use too many data types unsupported by tensorrt. That's why there's an onnx converter in TensorRT/samples/python/efficientdet. You can sort of replace the data types with graphsurgeon.
graph = gs.import_onnx(onnx.load(IN_MODEL)) # convert the input layer from int8 to float32 for i in graph.inputs: i.dtype = np.float32 onnx.save(gs.export_onnx(graph), OUT_MODEL)But that isn't going to convert the weight values.
-------------------------------------------------------------
There's another conversion script in automl/efficientdet which goes directly from frozen graph to tensorrt. There's also an alternative way to freeze the graph.
/root/automl/efficientdet% time OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=freeze --model_name=efficientdet-lite0 --logdir=/root/efficientlion-lite0.out2 --ckpt_path=/root/efficientlion-lite0 --hparams=/root/efficientlion-lite0/config.yaml
/root/automl/efficientdet% time OPENBLAS_CORETYPE=CORTEXA57 python3 tensorrt.py --tf_savedmodel_dir=/root/efficientlion-lite0.out2/savedmodel --trt_savedmodel_dir=/root/efficientlion-lite0.out2/efficientlion-lite0.engine
If the graph was frozen by inspector.py, it fails after 46 minutes with
ValueError: Input 1 of node StatefulPartitionedCall_1 was passed float from efficientnet-lite0/stem/conv2d/kernel:0 incompatible with expected resource.
If it was frozen by model_inspect.py, python just crashes.
If it's frozen by model_inspect.py & converted to ONNX by create_onnx.py, it crashes on an out of bounds error.
File "/usr/local/lib/python3.6/dist-packages/onnx_graphsurgeon/ir/node.py", line 92, in o
return self.outputs[tensor_idx].outputs[consumer_idx]
IndexError: list index out of range-----------------------------------------------------------------
There's a list of models on
https://mmdetection.readthedocs.io/en/v2.17.0/tutorials/onnx2tensorrt.html
which are known to work in tensorrt. The problem isn't converting the model as much as converting a trained version of the model.
These models are much slower than efficientdet. Efficientdet has 3.2 million weights. SSD mobilenet has 5.2 million.
---------------------------------------------------------------
model_inspect.py can be run in benchmarking mode
root@antiope:/root/automl/efficientdet% OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=bm --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=../../truckcam/lion320.jpg --output_image_dir=.
This gives 9fps using float32 libcudnn. It should be directly proportional to the size of the data type.
------------------------------------------------------------------------
https://github.com/google/automl/blob/master/efficientdet/README.md
had another command for directly exporting tensorrt from the checkpoint in section 3. They mention the highest scoring checkpoint is in the archive subdirectory. It was actually epoch 66.
time OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=saved_model --model_name=efficientdet-lite0 --ckpt_path=/root/efficientlion-lite0/archive --saved_model_dir=/root/efficientlion-lite0.out2 --tensorrt=FP16 --hparams=/root/efficientlion-lite0/config.yaml
The session_config argument had to be commented out for create_inference_graph.
This crashed in the same place tensorrt.py did.
-------------------------------------------------------------------------
The training method seemed to be the right focus. Did another training run with some changes to config.yaml
nms_configs: method: hard iou_thresh: 0.35This made no difference.
-------------------------------------------------------------------------
All these tensorrt exports have to be done on the jetson nano & they all seem to require a newer version of tensorrt. The jetson nano is a complete ecosystem locked into what was current in 2019.
One idea now is not trying to train efficientdet but going ahead with the pretrained one.
Software support for the jetson nano is definitely over. It's not going to run any more models besides the lucky few from years ago so investing in it is like retro computing.
Face tracking with the existing tracking camera sux. Another idea is to abandon face tracking & just run the body_25 model which was already ported to the jetson. If body_25 ran without face tracking, it would go at 9fps. It's possibly a more robust way of detecting animals than efficientdet.
Of course, if efficientdet ran without the face tracker, it would go at 20fps. It's not clear if the servo mechanics would be fast enough to justify the frame rate.
If body_25 falls over, another idea would be to just use the jetson for the XY tracker & build an updated enclosure for the original raspberry pi. The raspberry pi also took a lot less space.
Tracking without face recognition really sux. Another way would have to be found for classifying animals.
There are ways to strip down newer gopros & use them as the tracking camera. Face recognition would work well with that.
-
Jetson enclosure
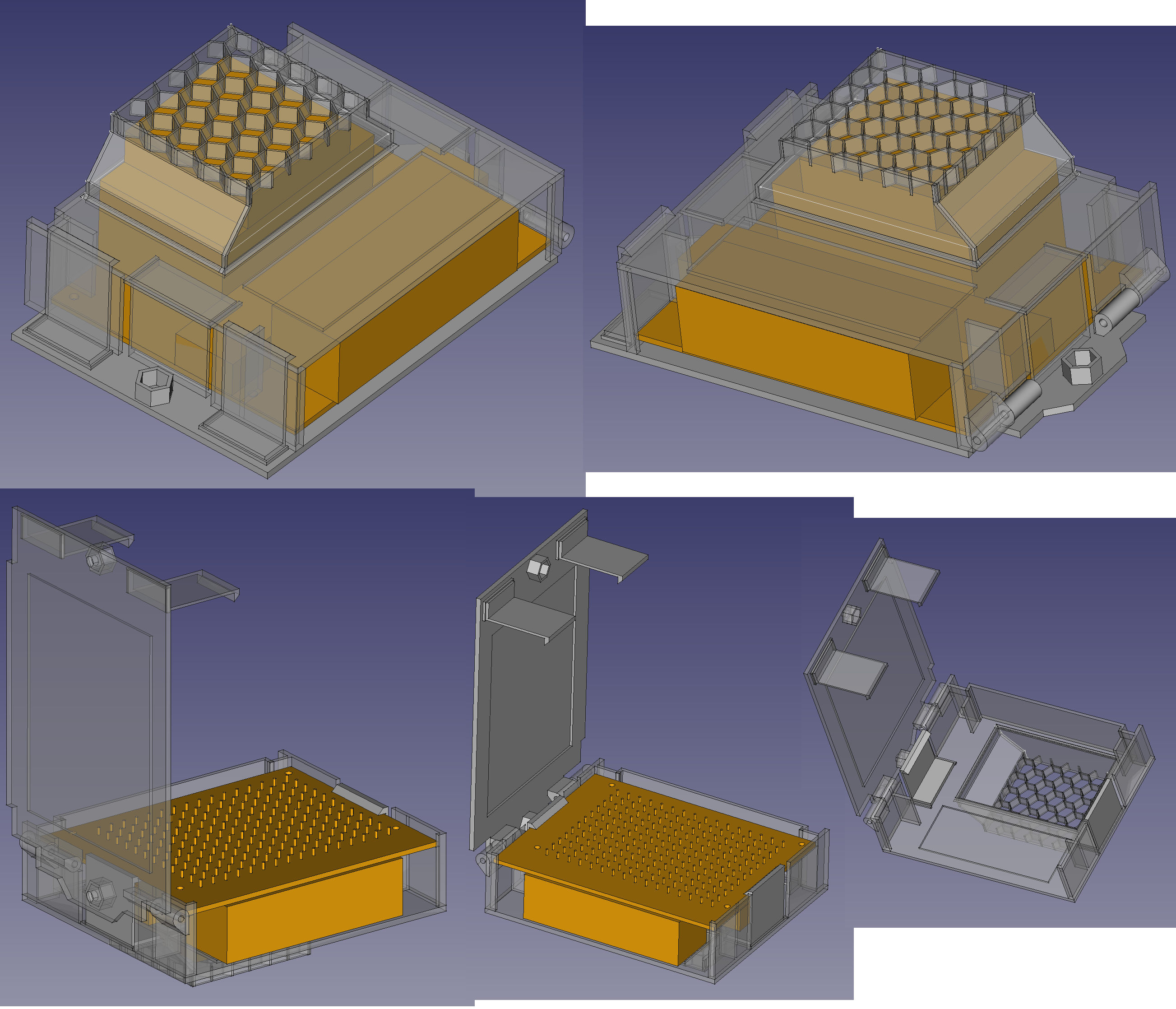
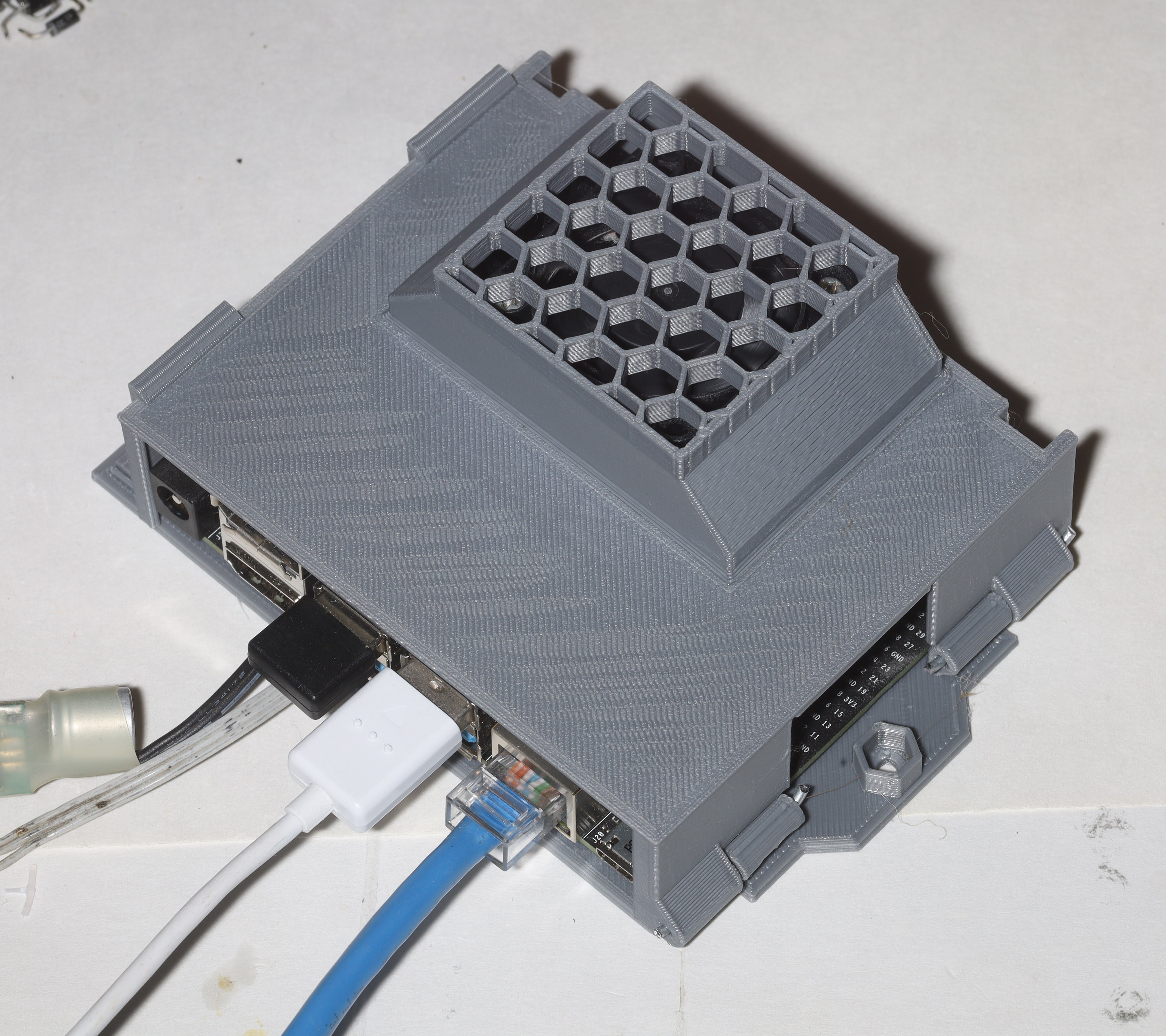
07/11/2023 at 23:12 • 0 commentsThe enclosure was making better progress than the neural network.
![]()
It evolved into this double clamp thing where 1 set of clamps holds the jetson in while another set holds the lid closed. There could be 1 more evolution where the lid holds the jetson in on its own. It would require some kind of compressible foam or rubber but it would be tighter. It wouldn't save any space. It could be done without compressible material & just standoffs which were glued in last. The clips being removable make it easy to test both ideas.
![]()
![]()
This design worked without any inner clips. The jetson wobbles slightly on 1 side. It just needs a blob of hot snot or rubber thing as a standoff on 1 side. The other side is pressed against the power cable. There's enough room inside for the buck converter, but it blocks the airflow. A hole in back could allow the power cable to go out that way & the buck converter to wrap around the back. The hinge wires could use PLA welds.
The air manages to snake around to the side holes. It would be best to have the hinges in the middle & openings in the back. The hinge side could have wide hex grids for more air flow. The clip side could have 1 clip in the middle & wide hex grids where the 2 clips are. There's enough room under the jetson for the clip to go there. This would take more space than the existing side panels.
The existing holes could be widened. A hex grid under the heat sink instead of solid plastic could get rid of the empty space. Another hex grid on top of the USB ports would look cool.
The next move was to try inference on x86 with automl-master/efficientdet/model_inspect.py
python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientdet-lite0-voc/ --hparams=voc_config.yaml --input_image=320.jpg --output_image_dir=.
python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=test.jpg --output_image_dir=.
python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientdet-lite0/ --hparams=../../efficientdet-lite0/config.yaml --input_image=320.jpg --output_image_dir=.
Used a 320x320 input image. None of the home trained models detected anything. Only the pretrained efficientdet-lite0 detected anything.
![]()
Another test with the balky efficientdet-d0 model & train_and_eval mode.
python3 main.py --mode=train_and_eval --train_file_pattern=tfrecord/pascal*.tfrecord --val_file_pattern=tfrecord/pascal*.tfrecord --model_name=efficientdet-d0 --model_dir=../../efficientdet-d0 --ckpt=efficientdet-d0 --train_batch_size=1 --eval_batch_size=1 --num_examples_per_epoch=5717 --num_epochs=50 --hparams=voc_config.yaml
python3 model_inspect.py --runmode=infer --model_name=efficientdet-d0 --ckpt_path=../../efficientdet-d0/ --hparams=../../efficientdet-d0/config.yaml --input_image=lion512.jpg --output_image_dir=.
![]()
Lower confidence but it detected something. Create the val dataset for a lion.
PYTHONPATH=. python3 dataset/create_coco_tfrecord.py --image_dir=../../val_lion --object_annotations_file=../../val_lion/instances_val.json --output_file_prefix=../../val_lion/pascal --num_shards=10
Then use the pretrained efficientdet-lite0 as a starting checkpoint.
https://storage.googleapis.com/cloud-tpu-checkpoints/efficientdet/coco/efficientdet-lite0.tgz
Another training command for efficientlion-lite0
python3 main.py --mode=train_and_eval --train_file_pattern=../../train_lion/pascal*.tfrecord --val_file_pattern=../../val_lion/pascal*.tfrecord --model_name=efficientdet-lite0 --model_dir=../../efficientlion-lite0 --ckpt=../../efficientdet-lite0 --train_batch_size=1 --eval_batch_size=1 --num_examples_per_epoch=1000 --eval_samples=100 --num_epochs=300 --hparams=config.yaml
python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=320.jpg --output_image_dir=.
![]()
Accuracy seemed to improve. Using the pretrained efficientdet-lite0 as the starting checkpoint seems to be required but the vals shouldn't be. It just takes too long to train on a GTX 970M. The internet recommends the RTX 3060 which would be like going from the lion kingdom's Cyrix 166Mhz to its dual 550Mhz Celeron.
The tensorrt version still didn't detect anything.
The model_inspect.py script also runs on the jetson.
OPENBLAS_CORETYPE=CORTEXA57 python3 model_inspect.py --runmode=infer --model_name=efficientdet-lite0 --ckpt_path=../../efficientlion-lite0/ --hparams=../../efficientlion-lite0/config.yaml --input_image=lion320.jpg --output_image_dir=.
This worked on the jetson, but it required a swap space.
![]()
The working version seems to use libcudnn but it builds the model procedurally from python source code & the checkpoint weights.
There is a tensorrt demo for python.
cd ~/TensorRT/samples/python/efficientdet
OPENBLAS_CORETYPE=CORTEXA57 python3 infer.py --engine=~/efficentlion-lite0.out/efficientlion-lite0.engine --input=~/lion320.jpg --output=~/0.jpg
Going to the next step & inferring with tensorrt requires cuda bindings for python which were never ported to the jetson nano. pip3 install pycuda just hits a ponderous number of errors. Sadly, pip3 also completely breaks your numpy installation in this process.
Trying to run the onnx model with onnxruntime just fails on the unsupported efficientNMS operator.
The only way to debug might be dumping layers from model_inspect.py
There's still a vijeo of efficientdet running on tensorrt.
Another look at pretrained efficientdet-lite0 revealed it was generating boxes for interleaved RGB while truckcam was feeding planar RGB. truckcam_trt.c was also double transposing the output coordinates. With those 2 bugs fixed, it started properly detecting but efficientlion-lite0 & the voc model were still broken.
![]()
Note face detection failed from this camera angle.
-
Efficientdet dataset hack
07/07/2023 at 23:40 • 0 commentsIt's been 6 months with the jetson, with only the openpose based 2D tracker & the face recognizer to show for it. 1 problem is it takes eternity to train a model at 17 hours. The conversion to tensorrt takes another 2 hours, just to discover what doesn't work.
It reminds lions of a time when encoding a minute of video into MPEG-1 took 24 hours so no-one bothered. The difference is training a network is worth it.
The jetson nano predated efficientdet by a few years. The jetbot demo used ssd_mobilenet_v2. That might explain the lack of any ports of efficientdet.
The detection failures were narrowed down to num_detections being 0, which can be tested after only 10 epochs.
Trying num_classes=2 didn't work either. 1 hit said 1 class was the background so the minimum number was 2. A higher than necessary number might dilute the network but it should eliminate it as a factor.
num_detections is always 100 with the pretrained network & always 0 with the lion network. The 100 comes from tflite_max_detections in the hparams argument. The default hparams are in hparams_config.py. hparams_config.py contains names & resolutions of all the efficientdets.
Another hit left out all the val images, starting checkpoint & threw in a label_map:
time python3 main.py \ --mode=train \ --train_file_pattern='../../train_lion/*.tfrecord' \ --model_name=efficientdet-lite0 \ --model_dir=../../efficientlion-lite0/ \ --train_batch_size=1 \ --num_examples_per_epoch=1000 \ --hparams=config.yaml \ --num_epochs=300
config.yaml:
num_classes: 2 label_map: {1: lion}automl/efficientdet/tf2/:
time OPENBLAS_CORETYPE=CORTEXA57 PYTHONPATH=.:.. python3 inspector.py --mode=export --model_name=efficientdet-lite0 --model_dir=../../../efficientlion-lite0/ --saved_model_dir=../../../efficientlion-lite0.out --hparams=../../../efficientlion-lite0/config.yaml
TensorRT/samples/python/efficientdet:
time OPENBLAS_CORETYPE=CORTEXA57 python3 create_onnx.py --input_size="320,320" --saved_model=/root/efficientlion-lite0.out --onnx=/root/efficientlion-lite0.out/efficientlion-lite0.onnx
time /usr/src/tensorrt/bin/trtexec --fp16 --workspace=2048 --onnx=/root/efficientlion-lite0.out/efficientlion-lite0.onnx --saveEngine=/root/efficientlion-lite0.out/efficientlion-lite0.engine
That got it down to 10 hours & 0 detections. Verified the pretrained efficientdet-lite0 got num_detections=100.
https://storage.googleapis.com/cloud-tpu-checkpoints/efficientdet/coco/efficientdet-lite0.tgz
That showed the inspector, onnx conversion, & tensorrt conversion worked. Just the training was broken.
A few epochs of training with section 9 of the README & the original VOC dataset
https://github.com/google/automl/blob/master/efficientdet/README.md
yielded a model with num_detections 100, so that narrowed it down to the dataset. The voc dataset had num_classes 1 higher than the number of labels. A look with the hex editor showed the tfrecord files for lions* had no bbox or class entries.
The create_coco_tfrecord.py command line was wrong. This one had no examples.
in automl-master/efficientdet
PYTHONPATH=. python3 dataset/create_coco_tfrecord.py --image_dir=../../train_lion --object_annotations_file=../../train_lion/instances_train.json --output_file_prefix=../../train_lion/pascal --num_shards=10
That finally got num_detections 100 from the lion dataset, with 2 classes. Sadly, the hits were all garbage after 300 epochs.
![]()
Pretrained efficientdet-lite0 wasn't doing much better. It gave bogus hits of another kind.
![]()
So there might be a break after the training. A noble cause would be getting the pretrained version to work before training a new one. The gootube video still showed it hitting valid boxes.
Jetson tracking cam
Failed attempt at camera tracking on the jetson nano




 More testing with pretrained efficientdet-lite0. It's already known that this model hits trees & light posts.
More testing with pretrained efficientdet-lite0. It's already known that this model hits trees & light posts.