0%
0%
BLDC Juggler
An attempt at advanced juggling with BLDC servos
 Josh Pieper
Josh PieperBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Anthrobotics
Anthrobotics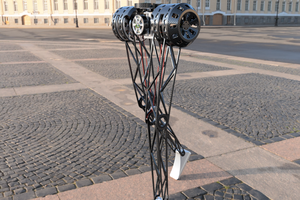
 Loukas K.
Loukas K.
 Aaed Musa
Aaed Musa
 peter jansen
peter jansen
That last throw in the video was impressive! A lot of power in the platform -- looking forward to seeing where this goes.