0%
0%
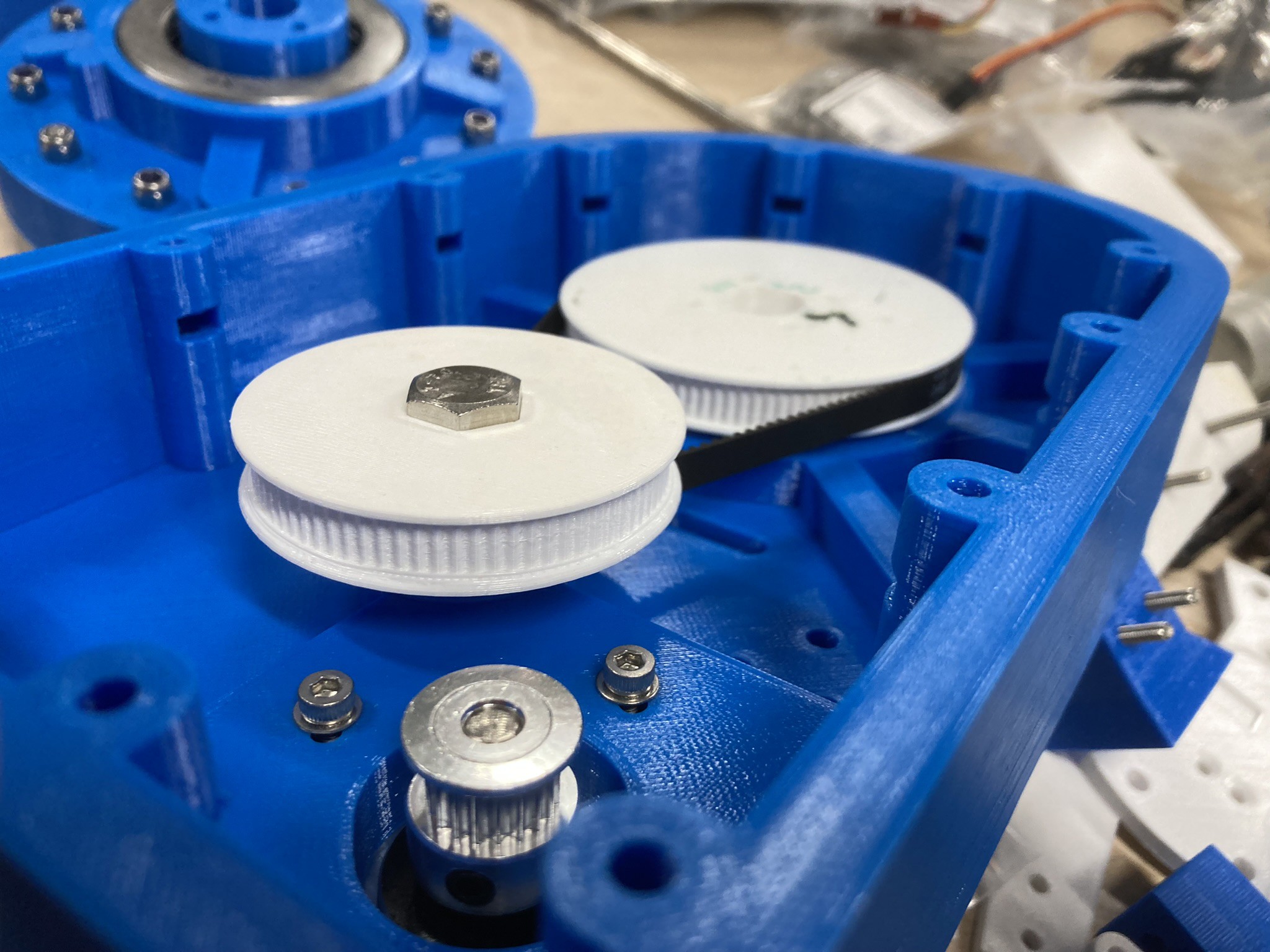
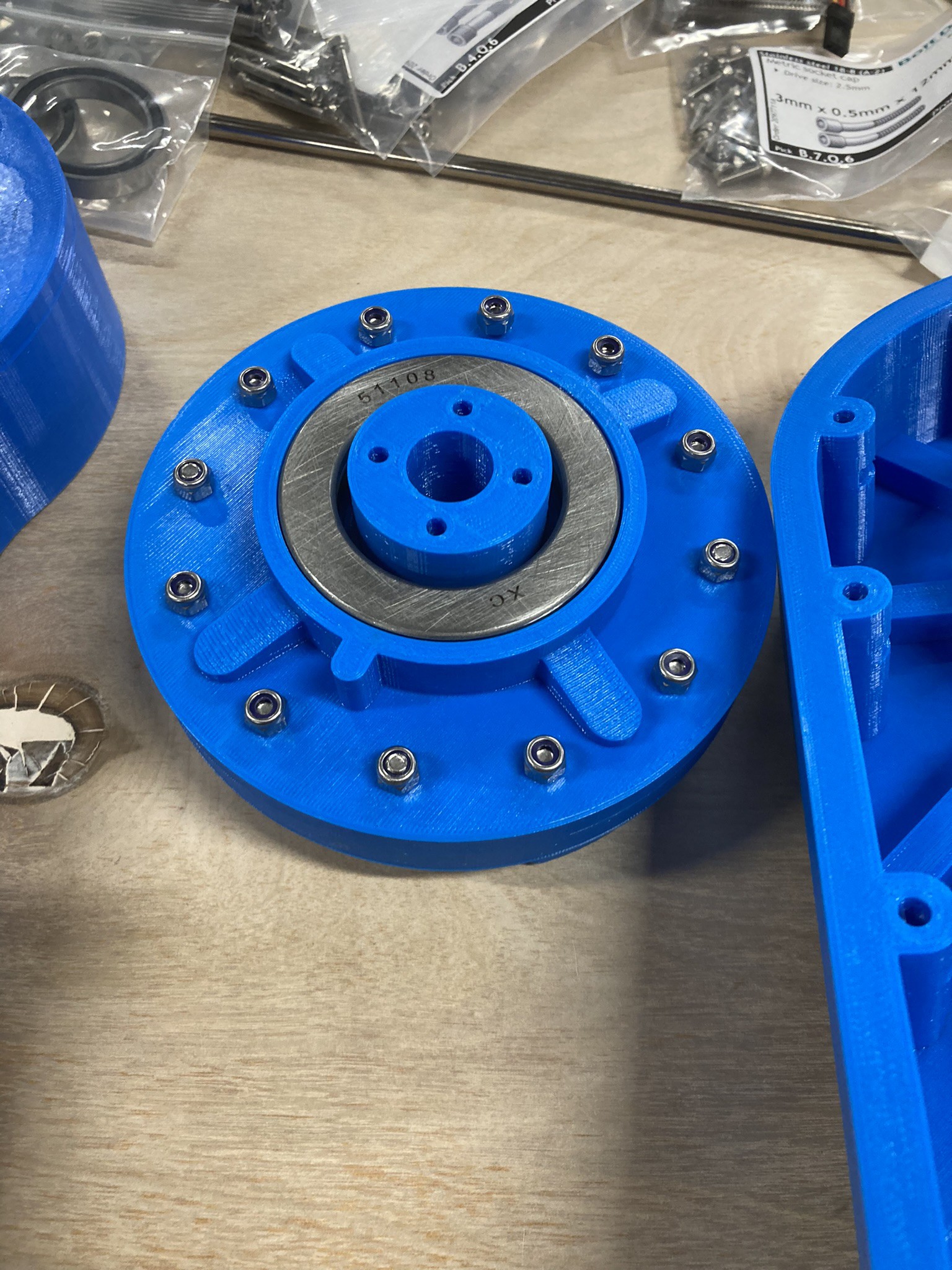
SCARA Industrial Robot Projects
Collection of projects revolving around SCARA industrial Robots, mechanicals, hardware, and software
 AVR
AVRBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







I am also following this project. There are two open source robotic project that have standardized on servos; https://open-dynamic-robot-initiative.github.io/ and https://www.opencontinuumrobotics.com/ I would love to modify this to use these same servo components