James Pilgrim
James Pilgrim-
Over 140k Views on Reddit
12/30/2024 at 16:21 • 0 commentsWow - we never expected anywhere near the number of clicks, views, shares and up-votes on Reddit! Between r/golfsimulator an r/golf, the PiTrac project has received more than 140k views!
-
GitHub Discussion Forum Now Open
12/30/2024 at 15:24 • 0 commentsPlease check out https://github.com/jamespilgrim/PiTrac/discussions.
-
First Release of PiTrac Source Code
12/27/2024 at 22:35 • 0 commentsWe just pushed out a very early release of the PiTrac source code! See here.
If you'd like to try to build it, please see the Pi Setup document, which includes compilation instructions toward the end, preceded by a lot of prerequisites. Please send any feedback and issues to pitrac.lm@gmail.com.
The code drop is not quite ready for prime time, but we didn't want another weekend to go by without giving folks a chance to compile and see the source code. We hope to have a little more finalized version out in the first half of January.
This version has no TruGolf connection ability, but we expect to include that next week.
Addendum:
If you're interested, you will need to make sure you have the latest "Bookworm" Pi O/S installed on the Pi you're building on. Once you have the pre-requisites like OpenCV and libcamera and such, the build process should hopefully be a pretty straight-forward meson/ninja build. Something like:
> mkdir ~/Dev
> cd ~/Dev
> git clone https://github.com/jamespilgrim/PiTrac.git
> export PITRAC_ROOT=/home/<your username>/Dev/PiTrac/Software/LMSourceCode
> cd $PITRAC_ROOT/ImageProcessing
> meson setup build
> ninja -C build
-
When are y'all going to release the darn C++ source code?!
12/19/2024 at 23:42 • 1 commentA fair question. We're working on it! A couple folks have asked - what's taking so long? So, we figured we'd provide a couple examples of the stuff we are having to do now. Which to be fair, probably should've been done a while ago. But in any case...
PiTrac has interfaces to a couple of golf simulators as well as a multi-threaded socket-based framework to connect to future systems. Which is great! But those interfaces also introduced an issue as we're preparing to release the code. Turns out some of the interfaces use 'secret' codes that are specific to each launch monitor vendor -- which now includes PiTrac. Those codes have to be protected because of the NDA that allowed us to interface to those systems in the first place.
The decision has been to put the code around the key exchange in a separate object file or link library that will be distributed with the rest of the source code. So far, so good. But it turns out, the keys (and some related information) could still be discernable by a determined person by various de-compiling tools and other techniques. Thus, we need to obfuscate (essentially encrypt) the data strings in the object file that will contain the proprietary information. Not too hard - there's C++ packages for that, so ok. But, then it turns out that the obfuscation code doesn't easily work in a multi-threaded environment (long story), and yes--of course--the simulator interface is multi-threaded. So, we're working on that. Of course, it will entail additional testing with the third-party golf simulators, which also takes time.
Anyway, that's one example of some of the work going on right now. :/
Other work has been related to making it easier for the average--ish person to build PiTrac. For example, we have been working to move to a different, standard version of the Gnu compiler that is currently being packaged with the Raspbian Pi Operating System (Version 12.2.0). Until recently, we've been relying on C++20 or later versions of the compiler for all our projects, including PiTrac. But we've recognized that having to compile your own compiler just to get a more modern development platform is not an easy task. So, we've spent some time porting some our more-recent C++ code and libraries back to the version of the compiler that is currently distributed with the Pi O/S. Which also involves more testing, of course.
Still, despite all of this, it's still a great project to work on!
-
What Is PiTrac? And What Is NOT?
12/17/2024 at 19:50 • 1 commentPiTrac(*) - What is it? And What is it Not?
Yes, of course - PiTrac is an open-source golf launch monitor that you can build yourself, that you never need to pay a subscription for, and–if you’re willing–that you can add your own features to. But, it’s more than that, and we wanted to let folks know what it’s all about.
PiTrac is just a starting point of a DIY launch monitor to jump off from. It’s a starting line, not a finish line. We hope it can act as a seed that will grow further innovation. It’s still early in its development. We don’t even have left-handed golfer support yet. :/
PiTrac is a fun build journey. By building one of these systems, you’ll push yourself through 3D printing, soldering, scripting, large(ish) software system build tools, linux utilities, web-based systems, interprocess communications, and maybe even some coding. PiTrac is a project that is sufficiently complicated and uses enough technologies that it can be a great learning platform. If someone with few tech skills (but enthusiasm and a willingness to learn new things) took on building a PiTrac, they would come out the other end with a pretty good introduction to everything from 3D printing to Linux to building custom hardware.
PiTrac is something you can build without a full stable of equipment. We’ve tried to design things so that, for example, you can 3D print the parts on the type of small-bed 3D printer you can find at many public libraries nowadays. There’s only a single custom PCB part that you can generally have fabricated for a couple dollars and no surface mount chips or other things that need specialized equipment. All of the third-party software relied upon by the system is free.
PiTrac is a photometric-based system. We think that ball spin is pretty important from a ball-flight physics perspective. Which is why we built a photometric system, not a radar-based system. Some radar systems appear to work decently for spin, especially if you add little stickers to the ball, but we thought a photometric system would have the best potential for really accurate spin analysis.
PiTrac is an aggregation of several sub-projects. Even if you’re not into golf simulation, we hope that at least some parts of the code will be helpful. Maybe you just need a 3D model for a gimbal mount for a Raspberry Pi camera? Maybe you’re a photographer into nichey high-speed droplet pictures and just want software that can trigger a flash and a camera shutter? We hope there’s something here for you.
We also hope that the open-source nature of the system will promote a better understanding of the precision and accuracy of these types of simulated sports systems. If a few other engineers can get interested enough to pick apart the current system’s shortcomings (there are many!:) and work to publish testing results, folks can get to know exactly how close the simulation is. And hopefully work to improve it! That sort of information isn’t really available in detail from current manufacturers.
Finally, we believe PiTrac is a tiny part of a quiet grassroots innovation movement of folks who want to build and control their own technology. Even complicated tech! Specifically, it’s a little push-back against a world where a lot of tech is available only from large organizations and where no one knows how the tech they rely on works, let alone how to build it themselves. A gentle nudge against products that originally cost quite a lot to design and build–and were priced accordingly–but whose high retail prices have not kept up with the progression of technology. A dream that building your own (possibly clunky) device is more satisfying than just buying that device, especially if it’s otherwise financially out of reach. And we’re pretty sure that the growing number of hackerspaces, fablabs and makerspaces and other community-based digital fabrication workshops come from a similar thought-space.
What is PiTrac Not ?
It’s not a thing for sale. We’re not selling anything except perhaps some circuit boards that folks can get themselves from any PCB manufacturer. Who knows, though – maybe someone will base a business on this technology?
It’s not an outdoor system. The infrared-strobe based foundation for PiTrac would make it pretty difficult to work outdoors when competing with the sun. But that’s a tradeoff we were willing to make.
It’s certainly not a commercial-quality product. All the things you need to do in order to product-ize a technology have yet to be done. Half the features just baaaaaarely work. ;/ However, we’re hopeful that in time (especially with the help of more people in the open source community), PiTrac can become a stable, reliable easy-to-use launch monitor.
It’s not cheap, even by rich-country standards. We hope to continually push the price down, but PiTrac still costs hundreds of dollars to build. And that doesn’t include the price of tools you might need to purchase if you don’t already have them.
It’s not a golf simulator. Users will likely still need to hook PiTrac up to a simulator like GsPro or E6 (both of whom do a great job with that and at price points that many people can afford). But who knows? Maybe an open source simulator is in the works somewhere?
It’s not simple to make or to use. Making the system currently requires some decent technical chops, including working in Linux programming environments.
(*) Raspberry Pi is a trademark of Raspberry Pi Ltd. The PiTrac project is not endorsed, sponsored by or associated with Raspberry Pi or Raspberry Pi products or services.
-
GitHub Public Repository Now Online!
12/17/2024 at 19:48 • 1 commentThe public GitHub Repo is now up here: https://github.com/jamespilgrim/PiTrac. All of the designs for the 3D parts and the custom Connector Board PCB as well as most of the draft documentation are there. Please consider starring it!
We never did hear back from the GitHub folks about what (if anything) was wrong with the original PiTrac-specific site.
If you're looking to see what building a PiTrac is going to entail, you can start at the overview document here.
Although we're still working to get the software finalized and pushed out, preliminary instructions on how to get the Pi computers ready to build that software is here.
Please let us know any feedback you have, especially any mistakes you see!
-
PiTrac Physical Enclosure Models Completed - New Video
12/09/2024 at 19:56 • 0 commentsThe 3D models are finalized, and we've gone through the internal build instructions to try to make sure they are correct. We're still waiting on a #github problem, however. The new site was flagged for some reason. It's been 9 days, but we understand the tech-support folks at github are a little underwater right now. If it doesn't get fixed soon, we'll just switch to the old site.
In the meantime, here's a goofy video of the final (for the first release, at least) PiTrac enclosure.
-
Rebranding to PiTrac (well, we never actually had a brand in the first place...;)
11/30/2024 at 18:29 • 0 commentsWe are rebranding the DIY LM to PiTrac !
![]()
The new platforms (which should be permanent going forward) are:
- https://github.com/jamespilgrim/PiTrac
- https://hackaday.io/project/195042-pitrac-the-diy-golf-launch-monitor
- https://ko-fi.com/PiTrac
- https://www.youtube.com/@PiTrac
Reasons for the change were to try to make the project look a little more professional, memorable, and to make it less personal to the original authors. We'd like this project to move forward with contributions from others, so we thought this would help signal that it's not just one or two folks involved.
As usual, we'd appreciate any feedback!
-
Hardware Design Release (and PCB availability)
11/30/2024 at 17:42 • 0 comments![]()
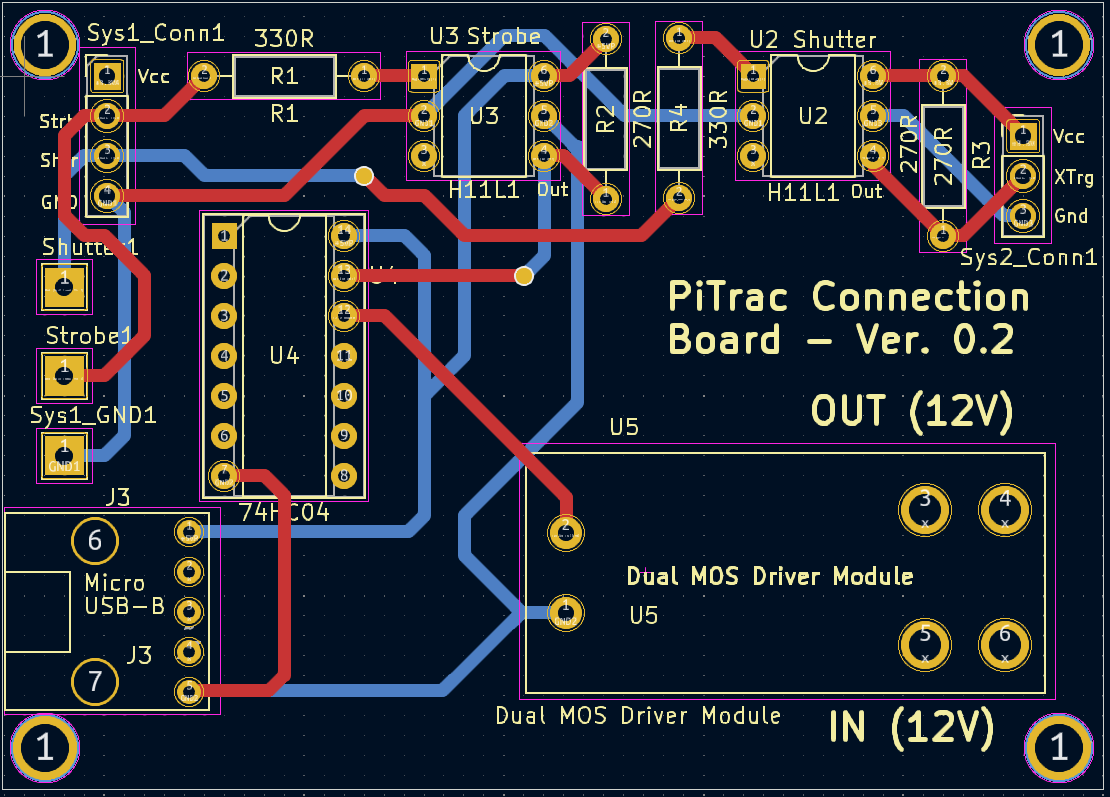
We've released the schematics, PCB layout, and other design artifacts for the small amount of custom hardware currently used by PiTrac. See github, here.
On a related note, if anyone is planning on building their own PiTrac DIY LM, we have a few already-manufactured PCB boards in the Maker-Lab. The first few people to private-message us here on Hackaday.io have the exciting opportunity to purchase a PiTrac Connector Board for US$1 plus whatever shipping is necessary to get where you exist.
-
First (Tiny) Github Release - Would Appreciate Any Feedback!
11/25/2024 at 18:49 • 1 commentWe're working to get our processes in order to release the components of the DIY LM into the wild on github. Being noobs at this, we're still not exactly sure which artifacts will be necessary for folks to productively make use of (and hopefully someday contribute to!) the project's work product.
To that end, we just put up a small sub-component of the physical enclosure of the LM here: https://github.com/jamespilgrim/Pi-Camera-Light-Filter-Holder. Frankly, releasing the software code is still a little bit off in time.
We'd appreciate any feedback on this, as we'd expect to release the rest of the enclosure with approximately the same file types and documentation. If we're doing something that the community doesn't expect, it would be great to know now before we set everything up.
PiTrac - The DIY Golf Launch Monitor
Launch monitor using low-cost Raspberry pi and camera hardware to determine ball launch speed, angles and spin