 jimrd
jimrdVersion 2:
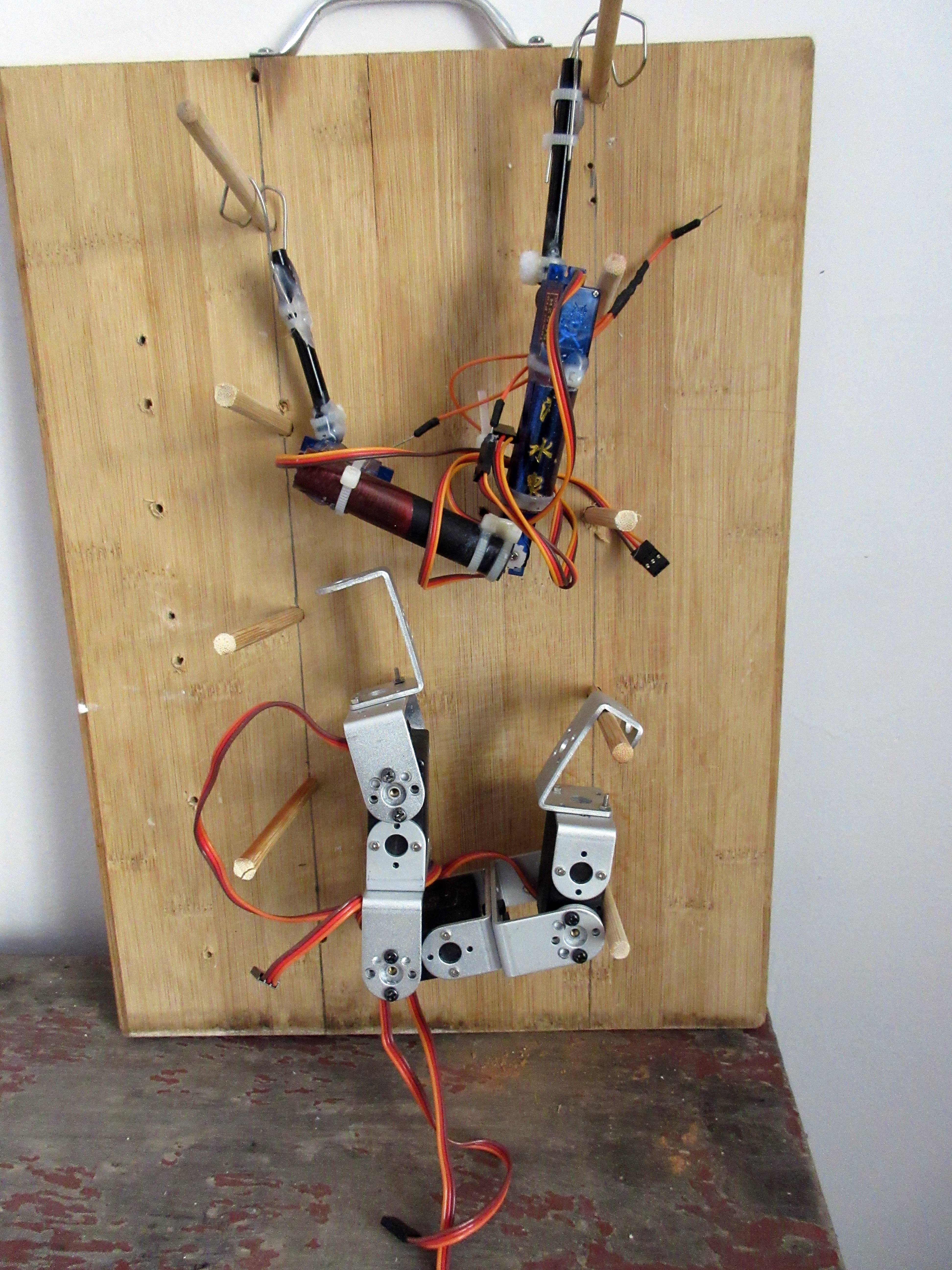
Using robotic servos and brackets - just a simple bolt together affair. Took about half hour though I know I will have to readjust angles. Can still use the custom wiring harness from version 1 to connect Arduino Nano. Problem is how to attach batteries to robot so that they do not interfere with servos as they are moving. May just let batteries and Nano dangle below middle servo and act as a swinging counterweight.
Pegs on climbing board are equidistant apart now so programming will be a cinch. Also longer pegs rather than shorter screws should make grasping them more reliable.
Rather than order new servos for this version I decided to dismantle my 7 servo robot that will just have to live on in videos. Heartbreaking.
Version 1:
3 micro servos
fishing pole sections for the arms
big paper clips (not standard size) for the "hands" or grippers
Arduino Nano
zip ties, epoxy, and hot glue
6 volt AA battery pack for the servos
5 long screws for the climbing pegs and a board (in my case a bamboo cutting board)
I used AAA batteries at first but they drained too quickly because the servos have to do a lot of work lifting the robot and also at times pushing against each other and the pegs. AA batteries worked pretty well.
Kind of an interesting project that has no obvious use except to find out if it can be done.
Programming was rather tedious. The video shows two programming efforts: the first I programmed each servo to move separately and this resulted in a rather jerky moving robot. The second effort I used an interpolated routine to basically move all the servos at the same time and this was decidedly less jerky though the movements could be made much smoother.
If the pegs are at different positions like in my project, you have to program for each movement to each peg. If the pegs were equi-distance and regular then the programming would be much simpler.



 deʃhipu
deʃhipu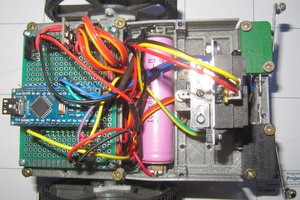
 Audrey Robinel
Audrey Robinel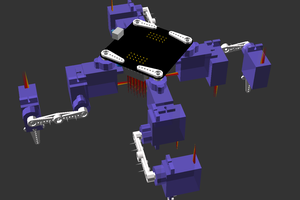

Just had an idea I may pursue later: the climbing robot has pegs for hands and just inserts them in holes drilled in a board. I guess the problem would be how to find a hole and how to know it has been inserted in the hole. Requires some sensors.