jimrd
jimrd-
MonkeyBot V2 Untethered
03/02/2017 at 08:52 • 0 commentsMonkeyBot now carries own powerpacks and is untethered. It is a wire mess and really needs a servo shield to get rid of them. But will stop working on this robot now and do something else. May continue working in the future and make the hands rotating so can climb ladder type structure too. No plans to give it any sensors or make it smart. Just wanted to see what kind of problems I would encounter in doing it. Pretty trivial project really. I have an idea for the rotating hands that would be pretty neat though. We will see.
-
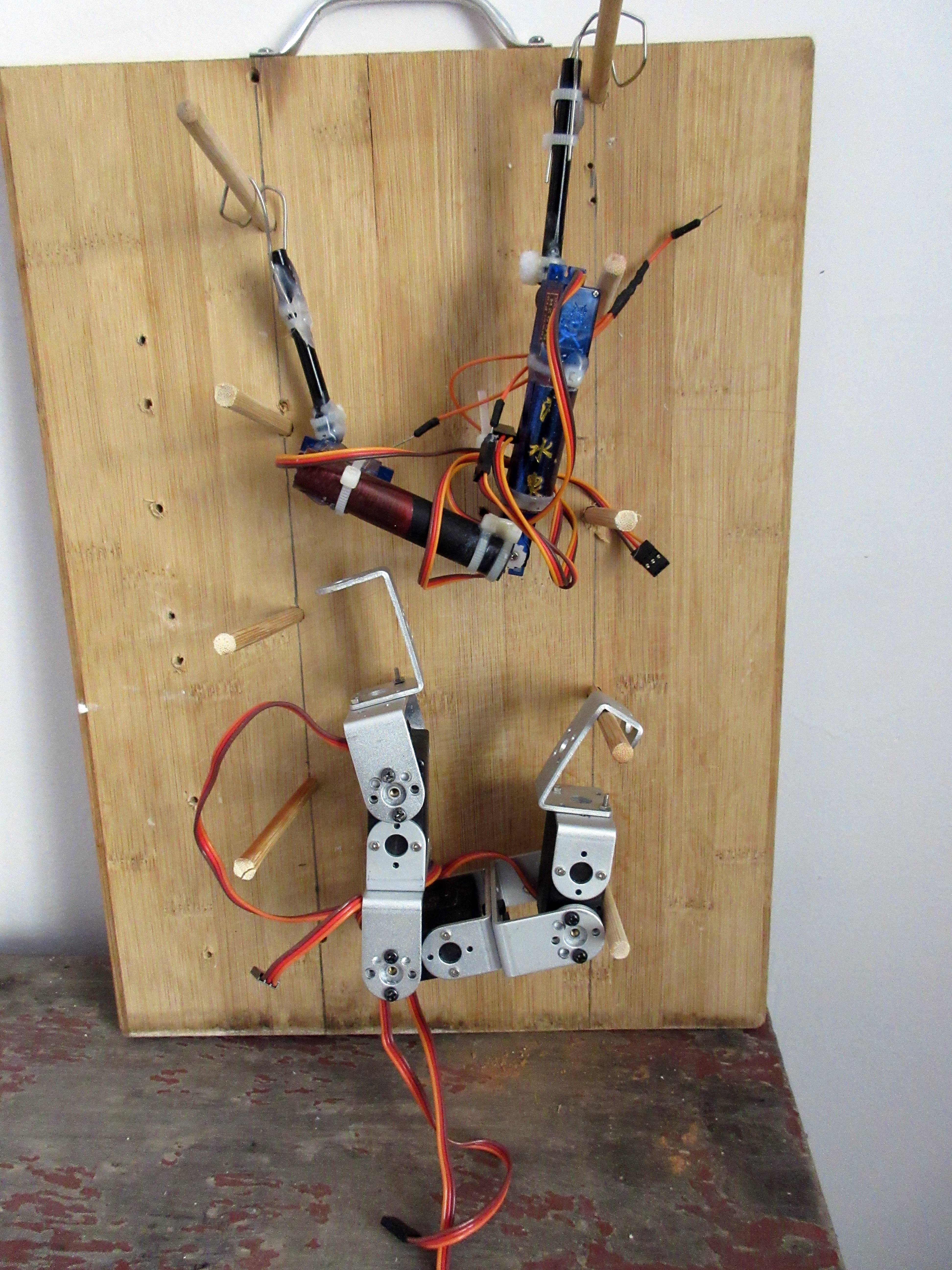
MonkeyBot V2 Tethered
02/28/2017 at 09:18 • 0 commentsVersion 2 MonkeyBot with standard size robot servos and aluminum brackets. Left arm shorter than right so used spacer. Left arm programming different than right arm. Left arm riskier of slipping off peg but smoother. Right arm more stop action but securely grasps peg by pulling in and then down.
Next will attach battery packs to robot. Should have plenty of beef to carry 3000 mAh battery and 9volt for Nano.
Need to replace wooden spacer on left hand with something flexible to keep torquing of servos when pull/pushing on pegs to a minimum.
Onward and upward.
-
MonkeyBot Version 2
02/25/2017 at 01:50 • 0 commentsHave built version 2, just need to wire it up and program. Drilled some holes and am using chopsticks for pegs for climbing board.
Update Feb 26: got it wired up but tethered. Programmed it in about 3 hours to climb left and right arms. Since pegs are equidistant apart the programming was pretty trivial. Noticed though that the arms are not the same, left arm is a centimeter shorter than the right arm which causes a problem as the left arm slips off the peg a bit. Will lengthen the left arm and reprogram. Then if that is ok will suspend battery packs and Nano below the middle servo with wires and zip ties. Then if that is ok, will build climbing peg board on a piece of two meter board. Then if that is ok, will take a break and work on my Serenity motor project.
![]()
-
MonkeyBot Traversing Horizontally
02/10/2017 at 06:27 • 0 commentsHere is first version MonkeyBot climbing horizontally across 4 pegs.
-
Plans for Version 2 of MonkeyBot
02/05/2017 at 08:35 • 0 commentsHave decided to work on version 2 of MonkeyBot which will use robotic standard sized servos (15kg capacity) using mechanical brackets (no hotglued servos for this version) so as to be able to carry its own power supplies. Also I will be using this version to experiment in the future with variable direction claws or hands which will make this robot more versatile in it's ability to climb different peg orientations.
Goals:
1. Make robot untethered and able to carry own power supply.
1. Try orienting both hands in the same direction ( perpendicular to servos) so the robot should be able to climb a standard ladder structure.
2. Engineer a rotating cuff between the hand and the arm so as to be able to change the direction of the hand so that the robot should be able to orient to different climbing structures on the fly.
Servos have been ordered and am impatiently waiting to get started on Version 2.
-
MonkeyBot Video
01/30/2017 at 07:40 • 0 comments
MonkeyBot V2 - 3 servo climbing robot
This is a 3 servo, Arduino Nano controlled robot that climbs pegs on a board.