 Ehsan Abdi
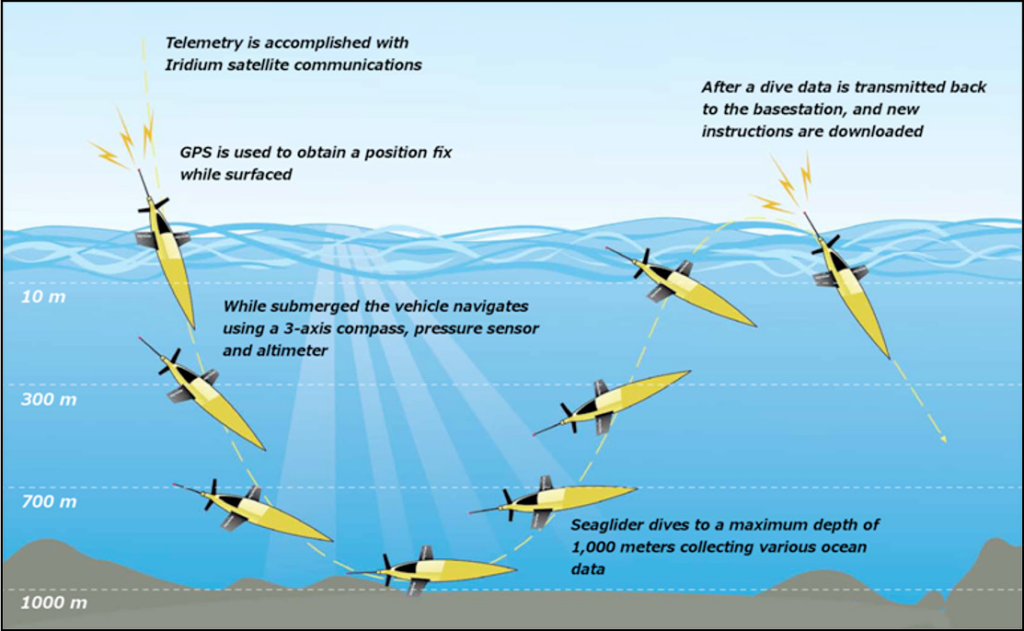
Ehsan AbdiAn underwater glider operates on principles similar to those of an aircraft glider, but in water instead of air. Like their airborne counterparts, underwater gliders do not use propellers for propulsion. Instead, they move forward by converting vertical motion into forward glide using their wings.
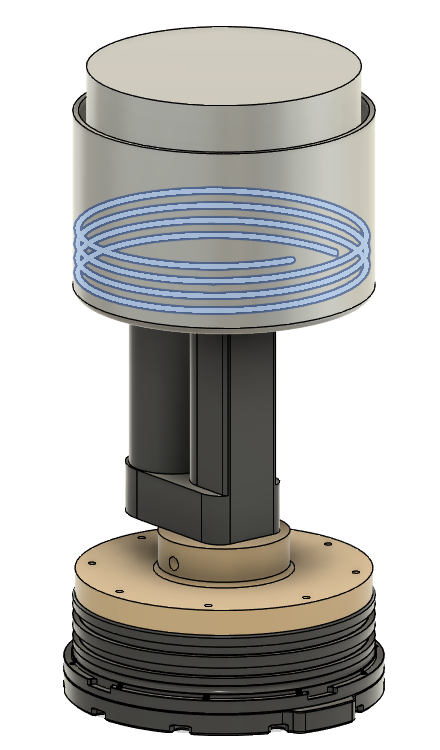
The key difference lies in how they return upward after descending. Underwater gliders use a clever buoyancy-based mechanism: they are designed to have a density very close to that of the surrounding water. By slightly changing their volume—using systems such as a piston pump or an oil-filled bladder—they can adjust their density. This allows them to alternately become slightly heavier than water (to descend) or slightly lighter (to ascend), effectively “flying” up and down through the water column.
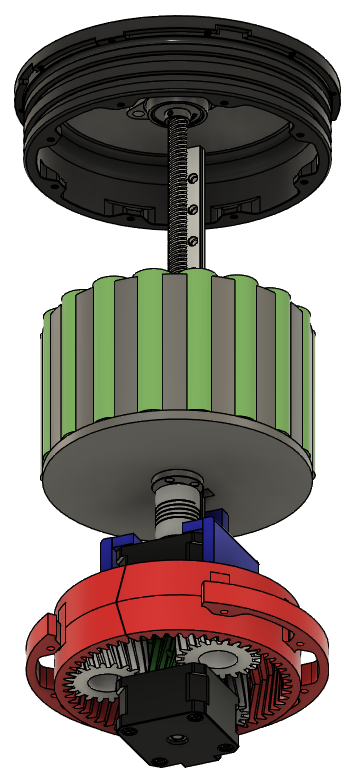
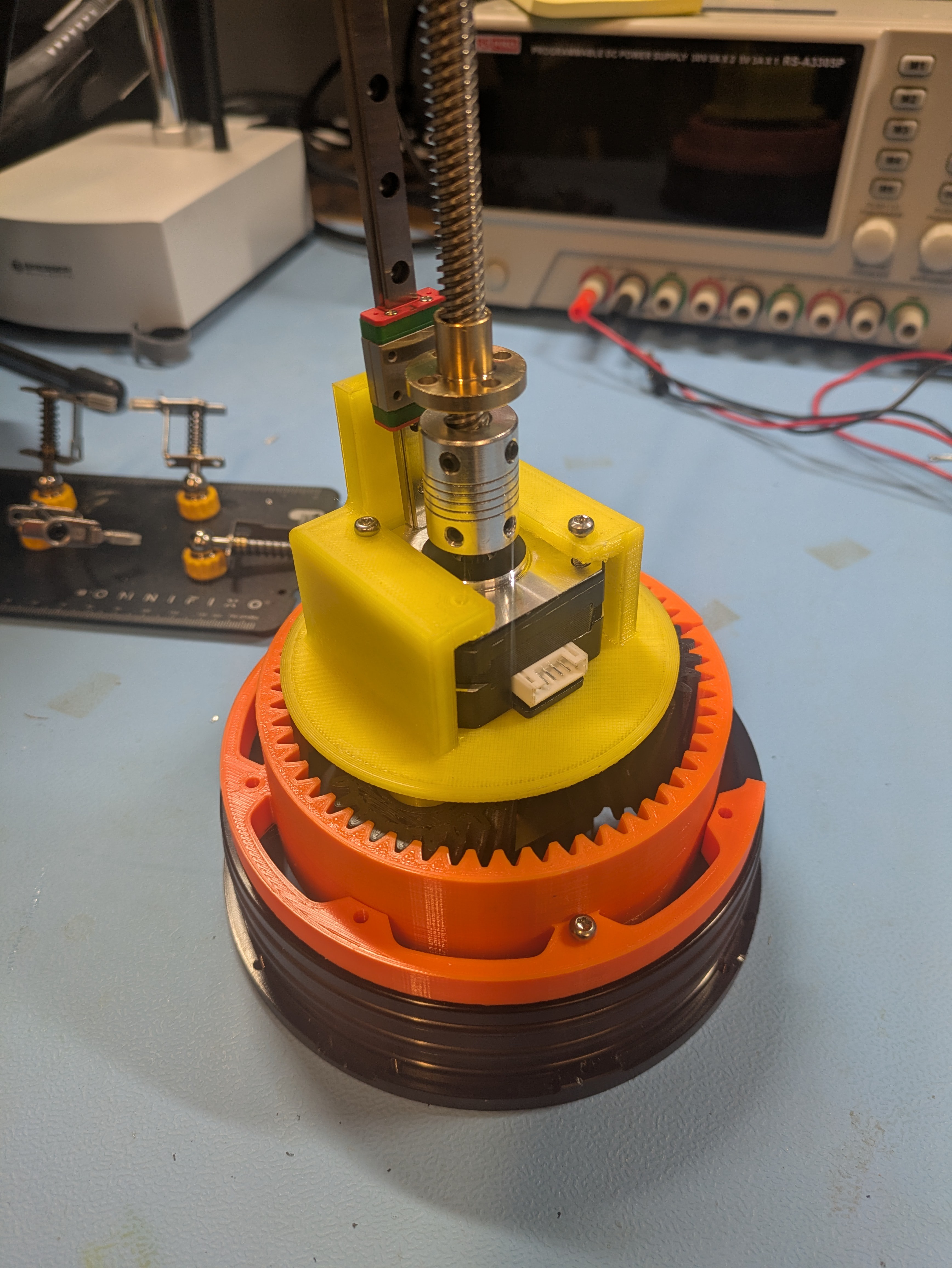
To control their movement, gliders shift an internal mass—typically the battery pack. Moving this mass forward or backward changes the pitch, controlling ascent and descent angles. Rotating the mass laterally induces roll, which in turn allows the glider to steer and maintain a desired heading.
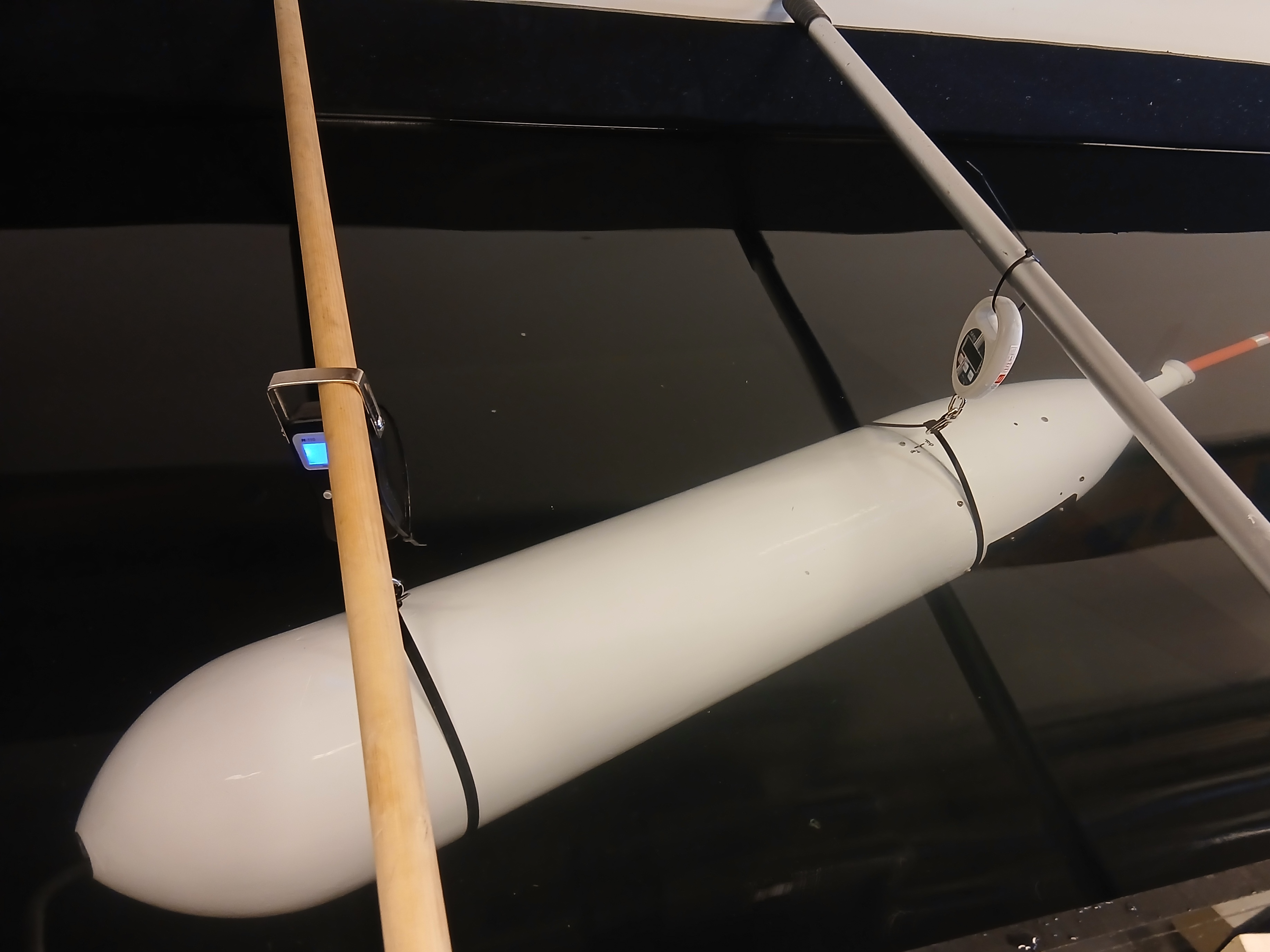
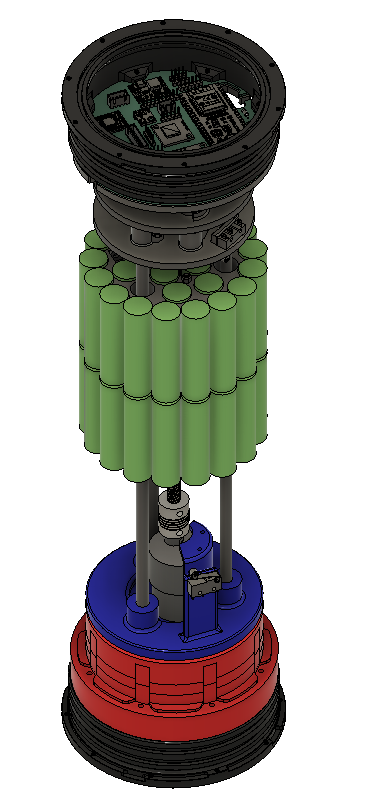
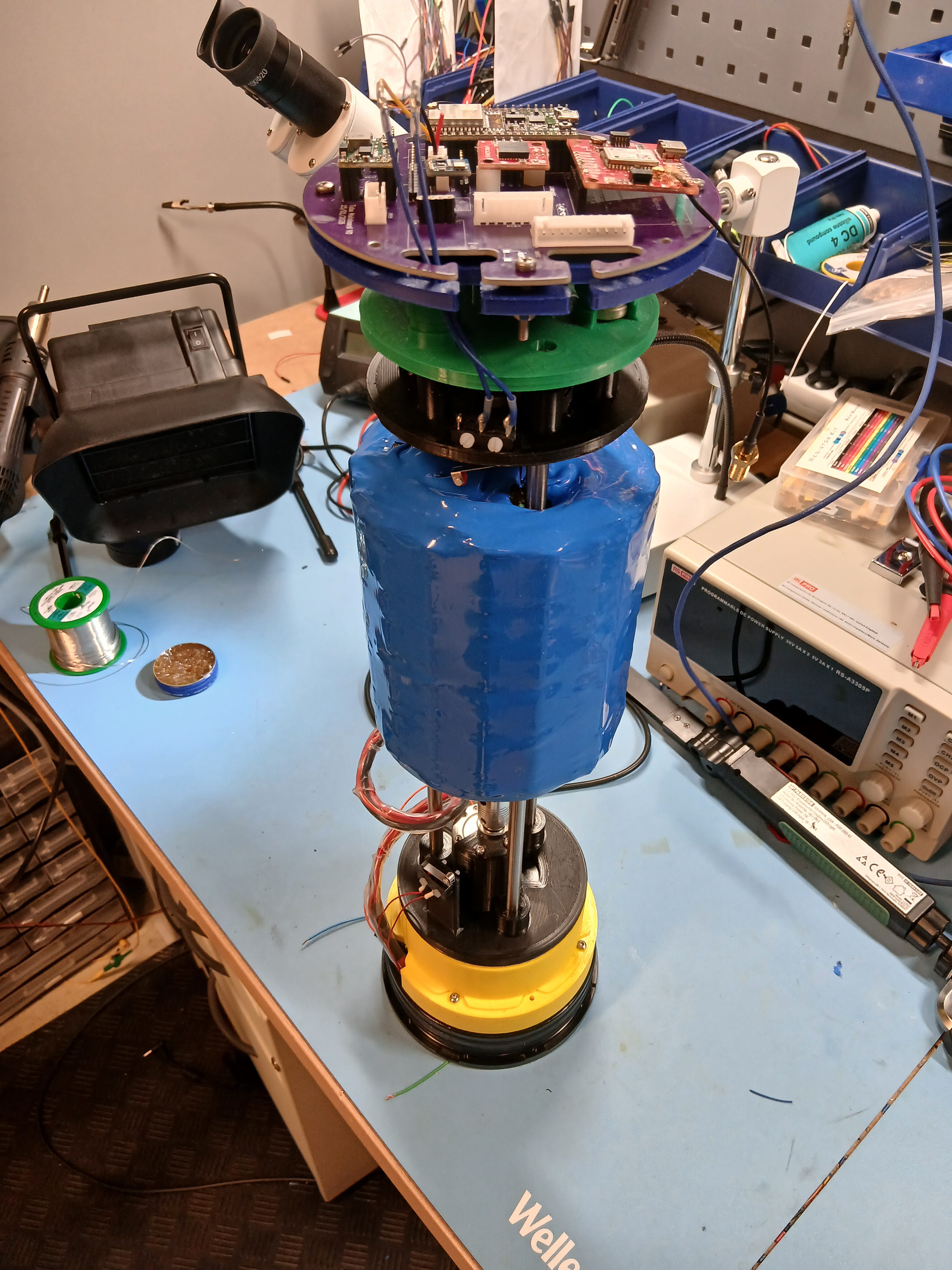
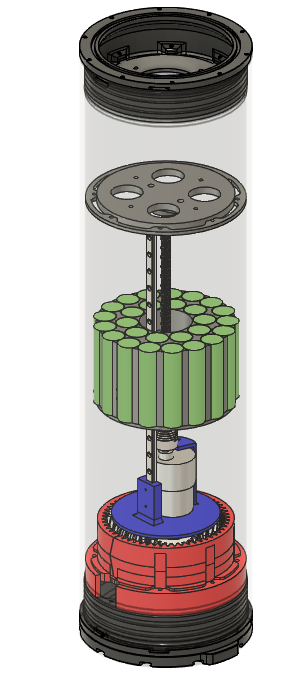
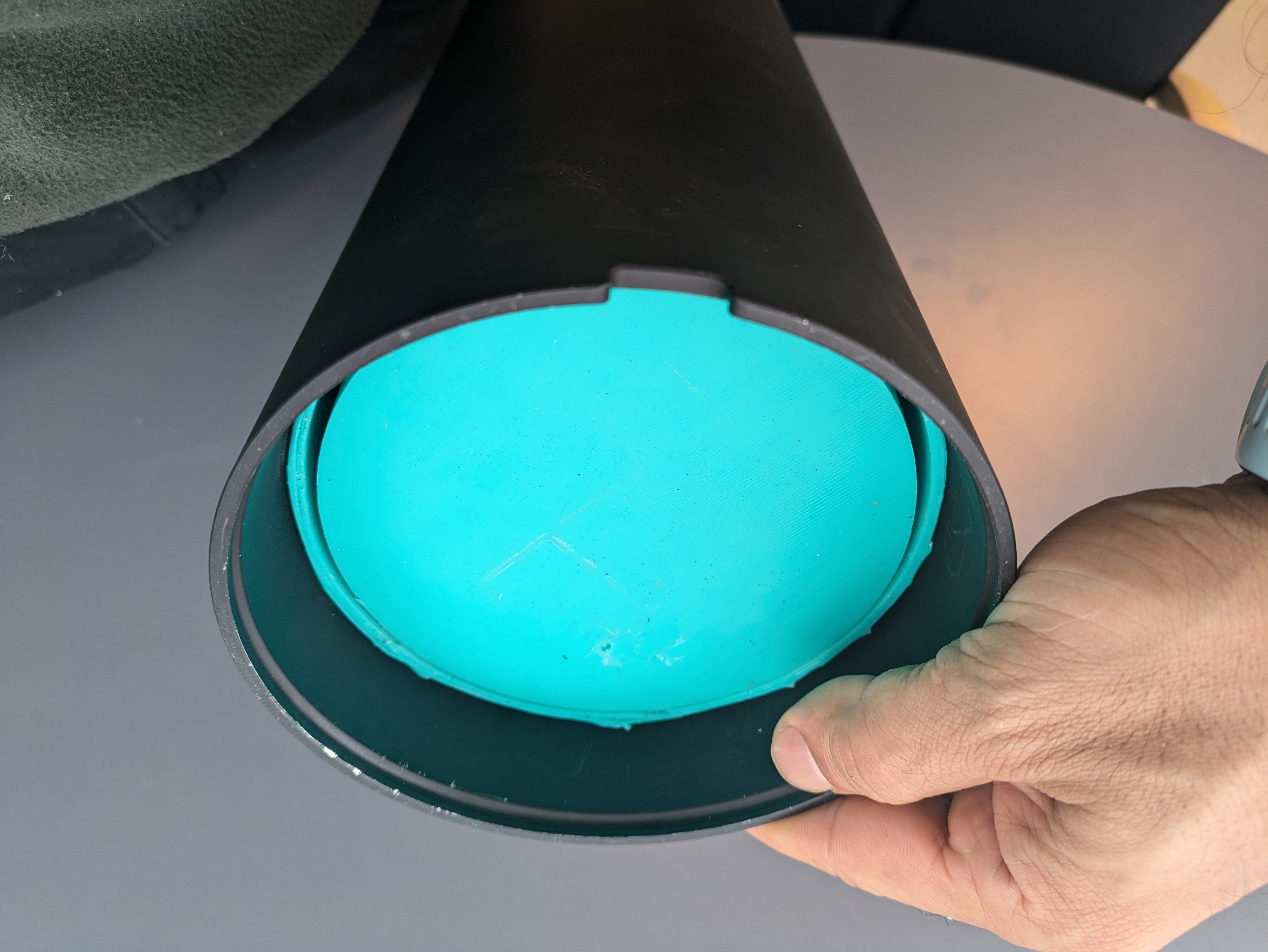
The glider will consist of three separate sections. These are buoyancy drive, mass shifter and electronics sections. Each section will be housed inside a 5" BlueRobotics pressure housing. This way, later we can upgrade the buoancy drive section to reach the full 1000m depth.
Initially I will focus on making a simple but robust buoyancy drive system. This will inistially consist of a custom-made rolling diaphragm and a linear actoator. Next step is to focus on the mass shifter system. As for comms, I am planning to use GSM and LoRa at the beginning and add Iridium at a later stage. The aim of this first build is to quickly and cheaply put together something functional and see what major changes needs to be done for the next version.







 Michael Barton-Sweeney
Michael Barton-Sweeney
 kelu124
kelu124
 joseph
joseph
 doctek
doctek