0%
0%
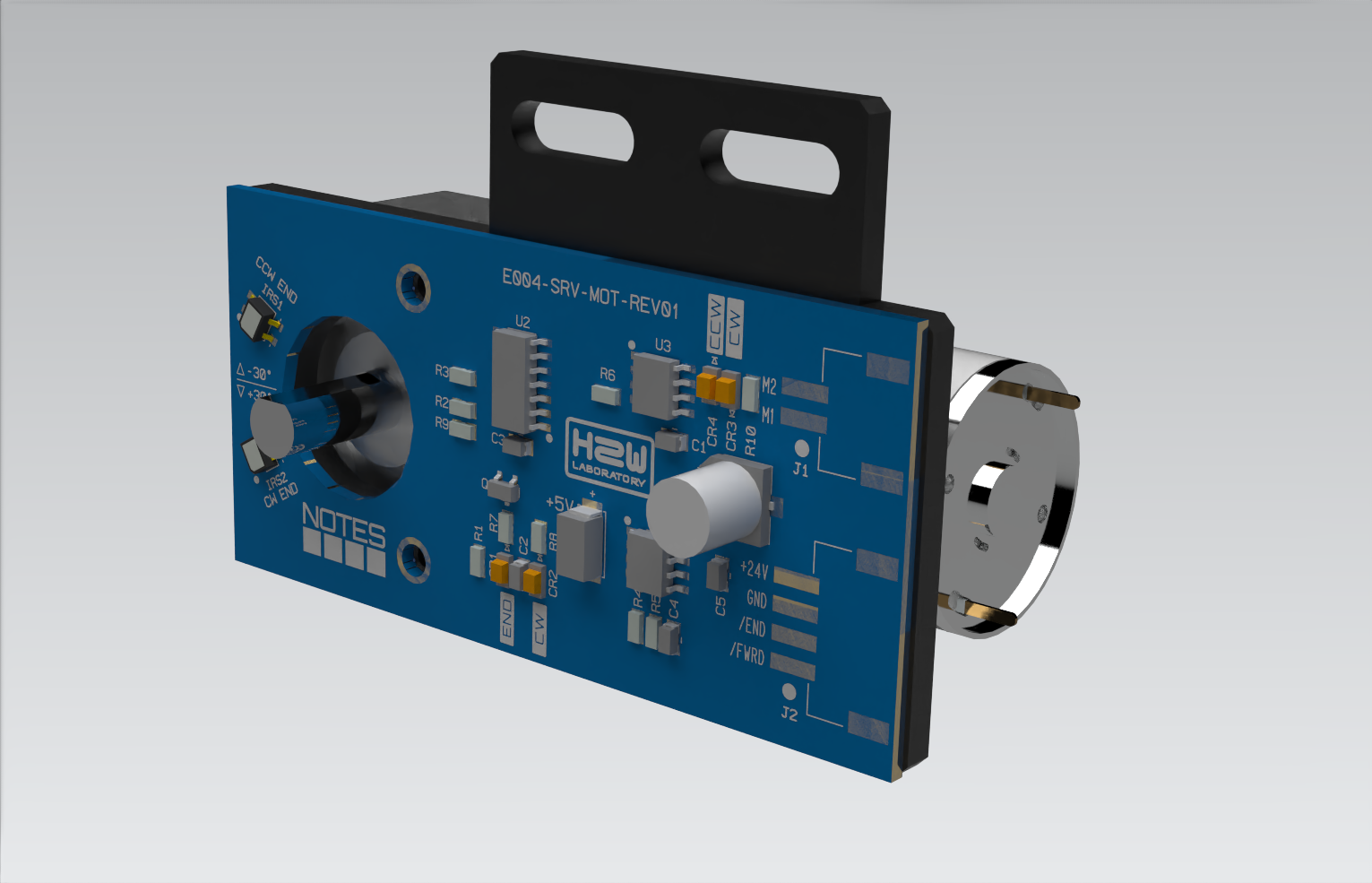
Renovation of the E004 audio tape recorder
A low-cost, high-quality tape recorder with a cross-board architecture.
 h2w
h2wBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
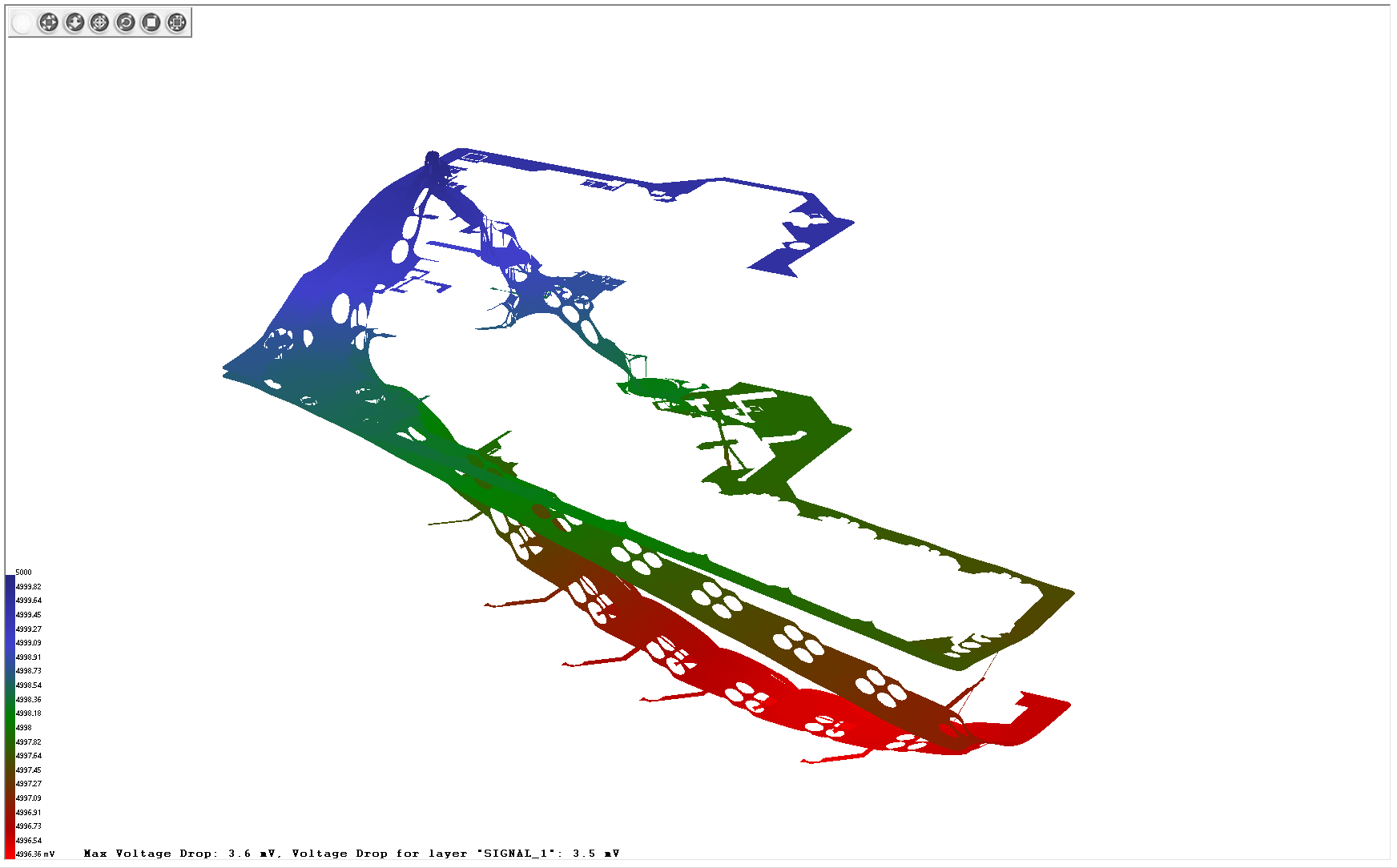
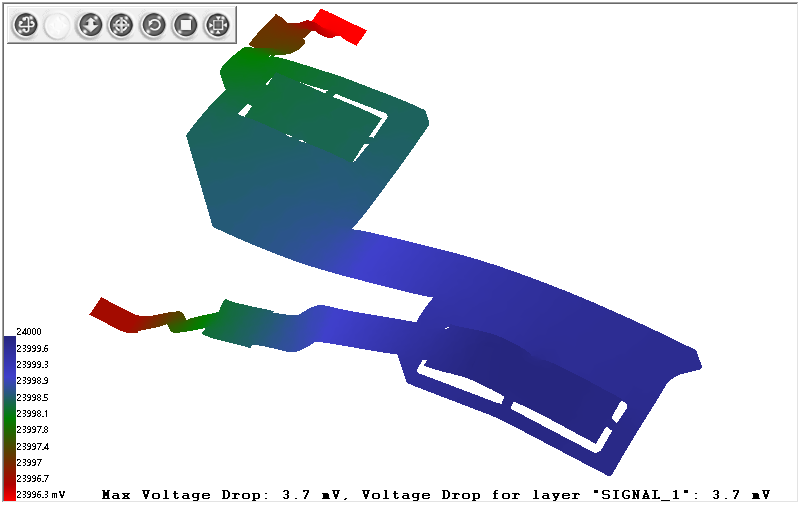
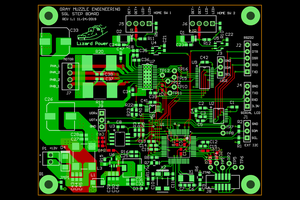
 It take time to minimize dropout on 2 layer's board.
It take time to minimize dropout on 2 layer's board.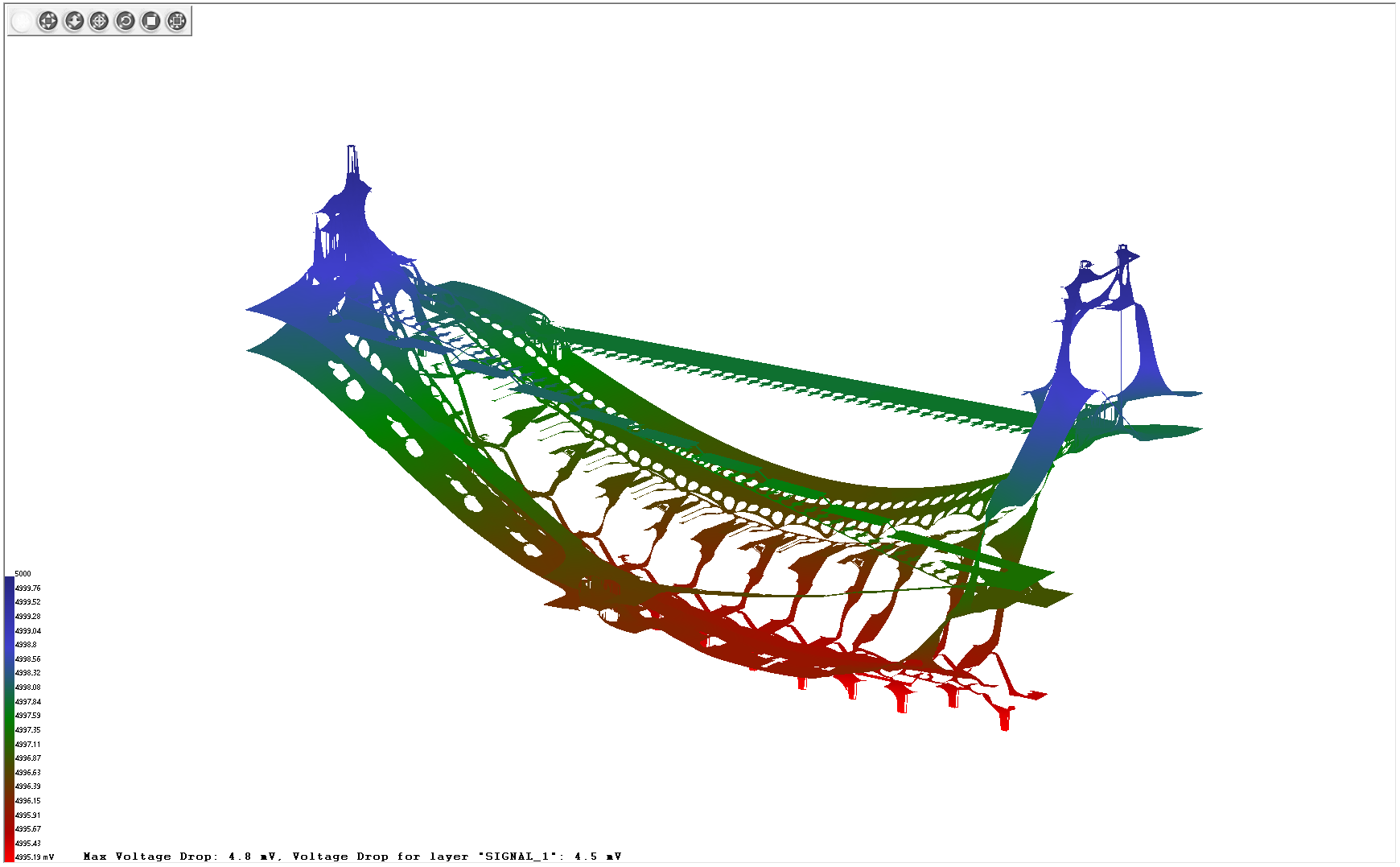
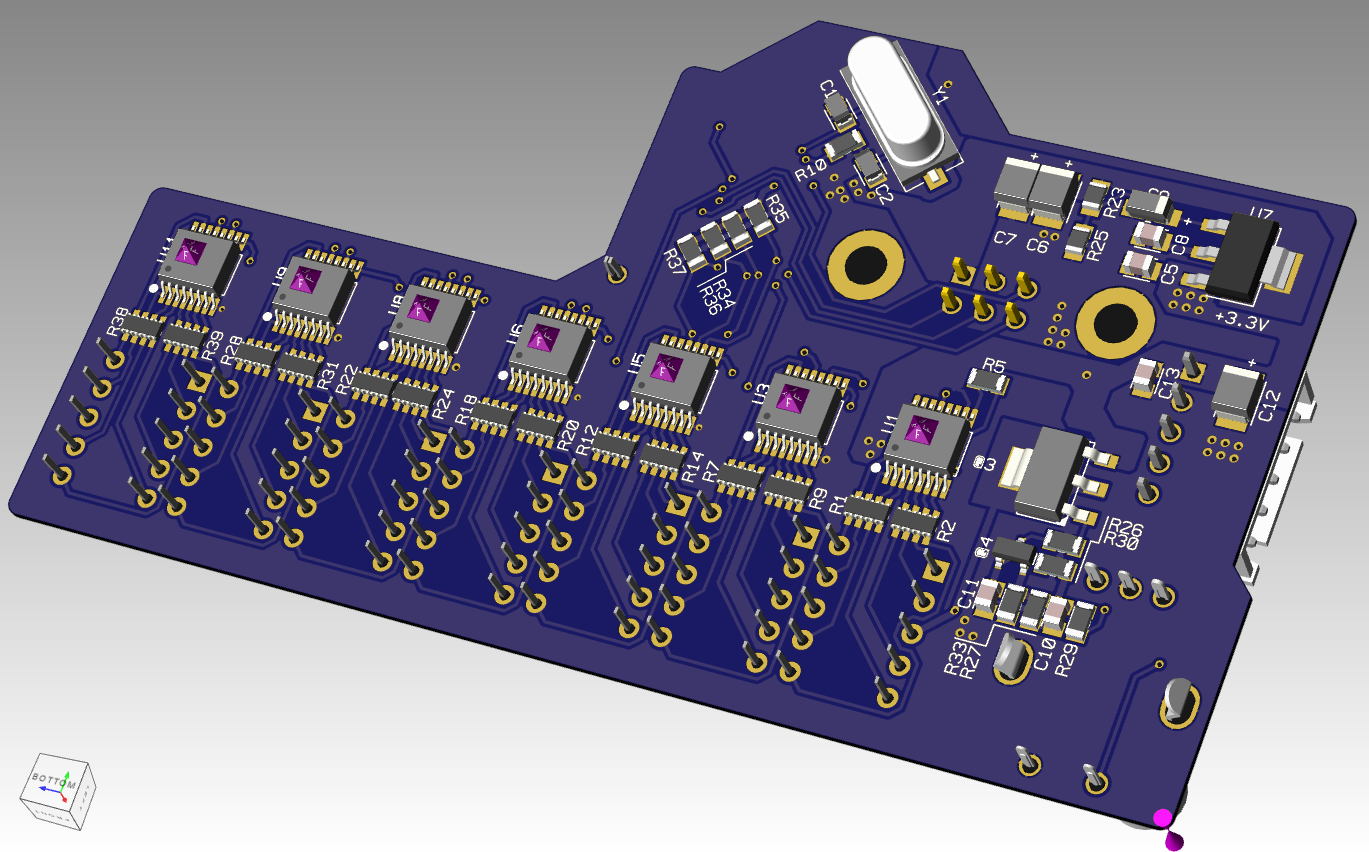
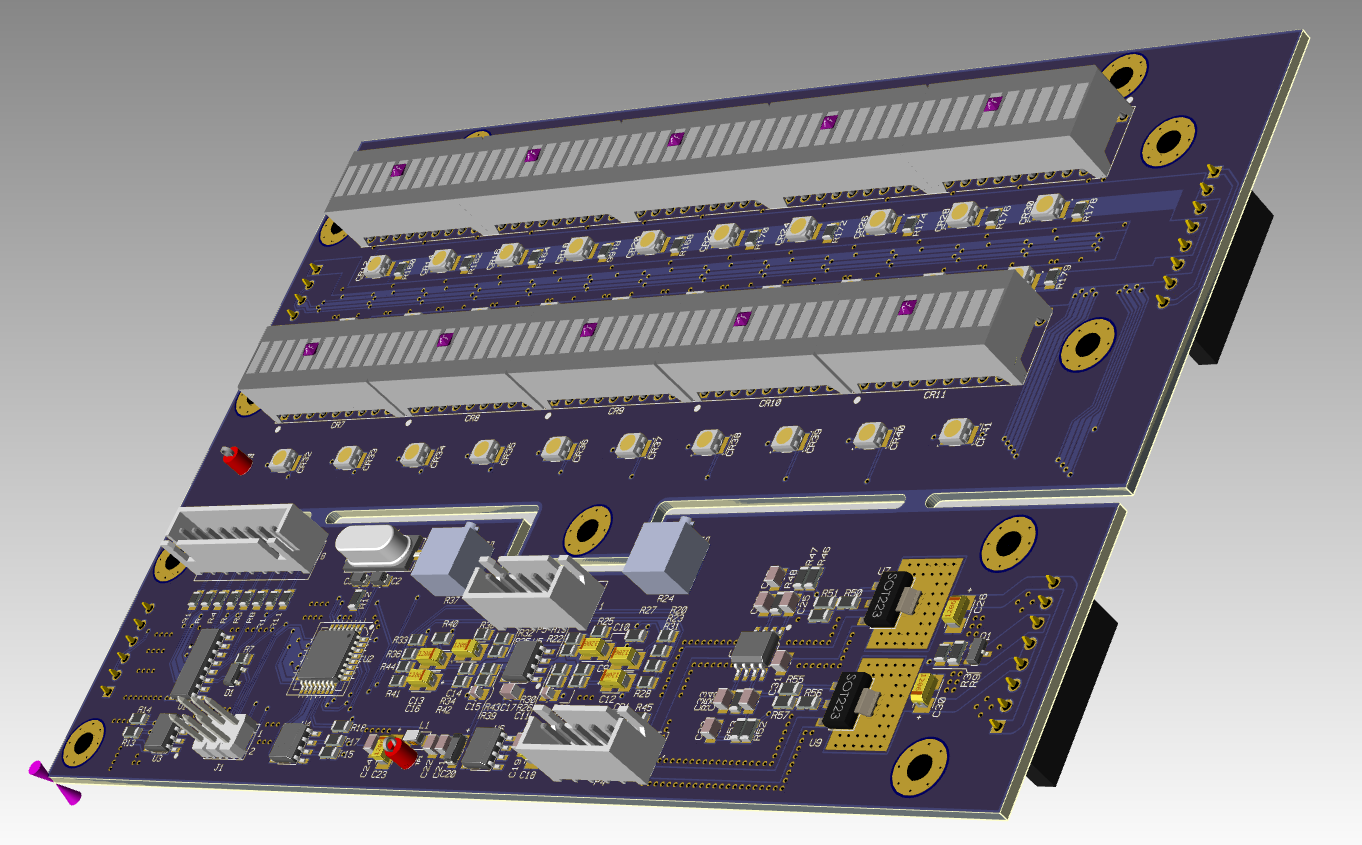
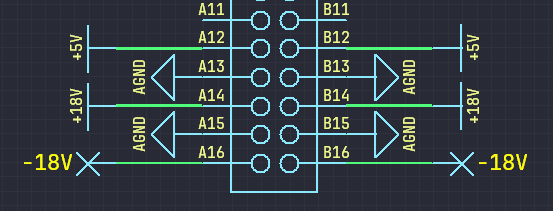 The control section only uses specific signals, the other pins remain unused.
The control section only uses specific signals, the other pins remain unused.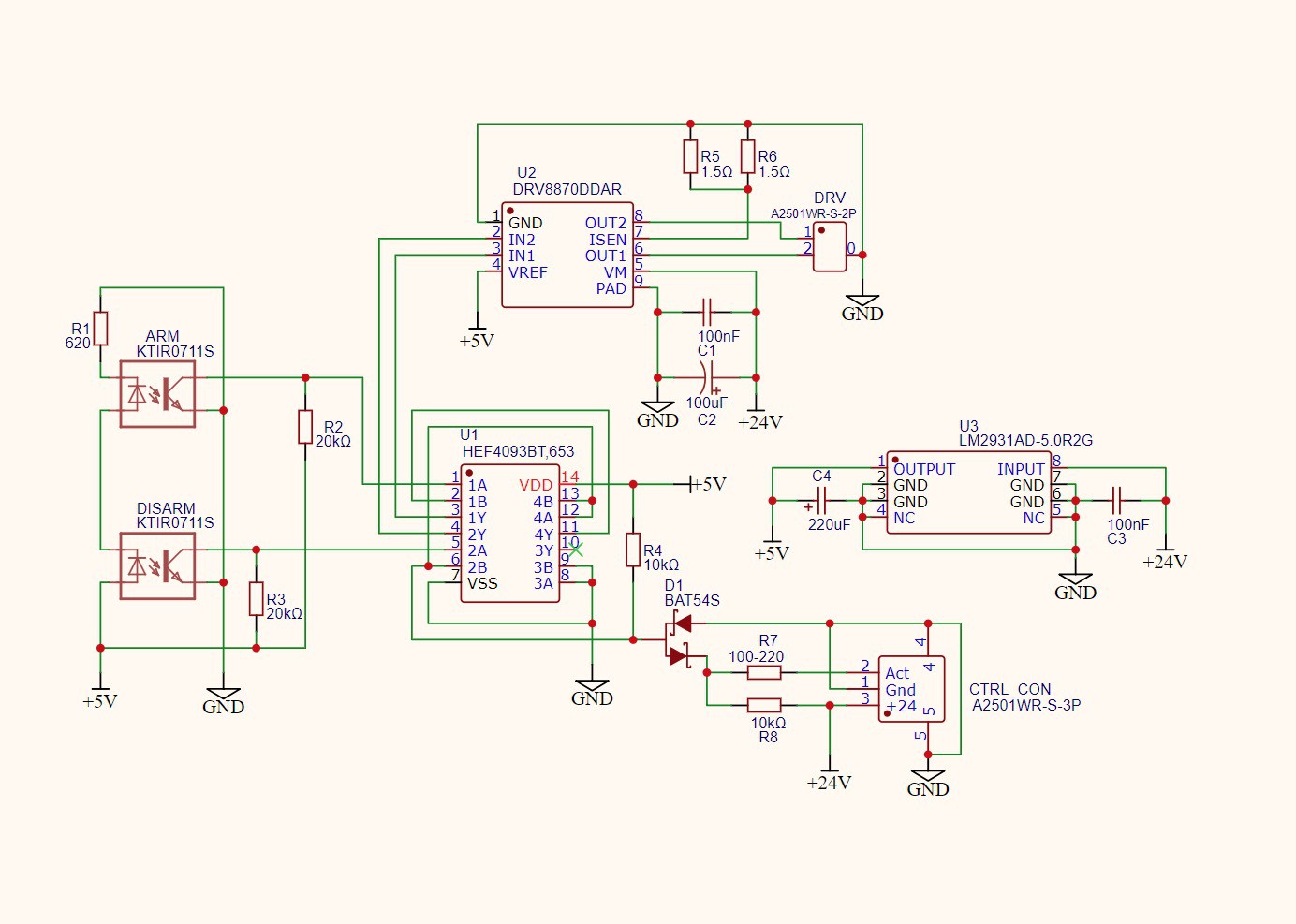


 Taylor Schweizer
Taylor Schweizer
 plugg.ee Labs
plugg.ee Labs
 Bharbour
Bharbour
This is really cool!