 kelvinA
kelvinANavigation
Prior Reading
Contents
The title tag system is explained here, and the table is updated when a change occurs. Notable logs have bold L# text.
Preface
[2024 - Aug 23 (last edit Sep 6)]
First, some context.

My Logitech G300S buttons were dying out, as well as the rubber sections, yet it had only been 8 or 9 months since I bought it. Perhaps I got a bad one, but this is the only mouse I have that is so particular to the type of surface it's used on. The reason I got it was because it was ambidextrous and programmable and seemed like a regular-mouse equivalent version of the Space Explorer which I tried (see #AirBerries and SpaceExplorer).
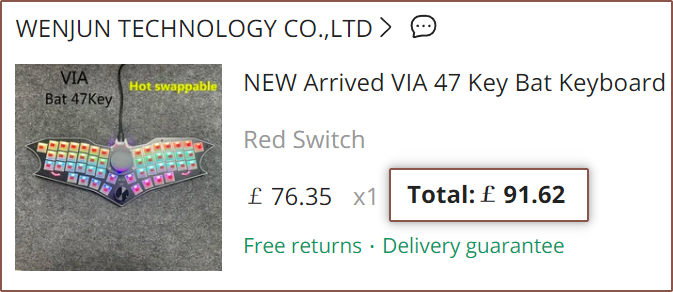
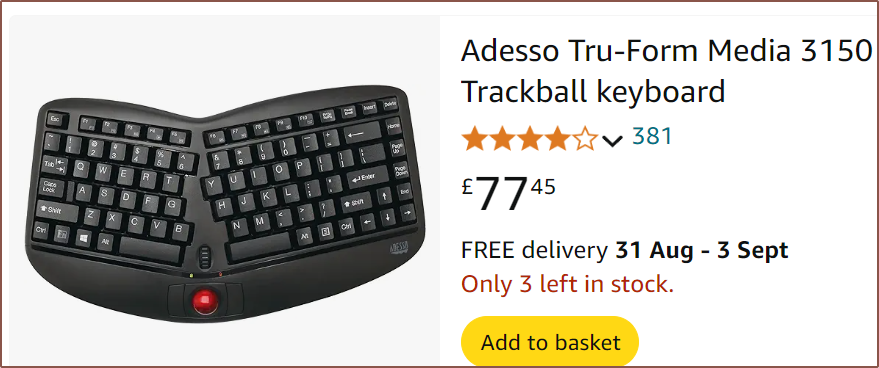
Since my (not so temporary) "temporary" keyboard probably passed its 3 year anniversary (essentially a full input-device term), I decided to start my search with keyboards first. Unlike the last time a few months prior when I was searching for "ergonomic" keyboards, this time, one with a trackball showed up:
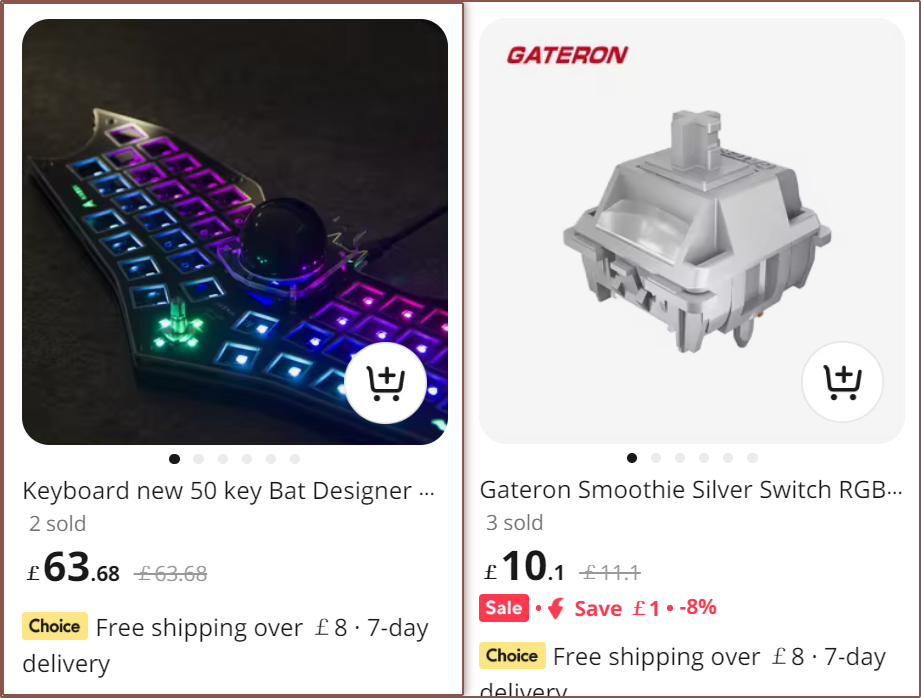
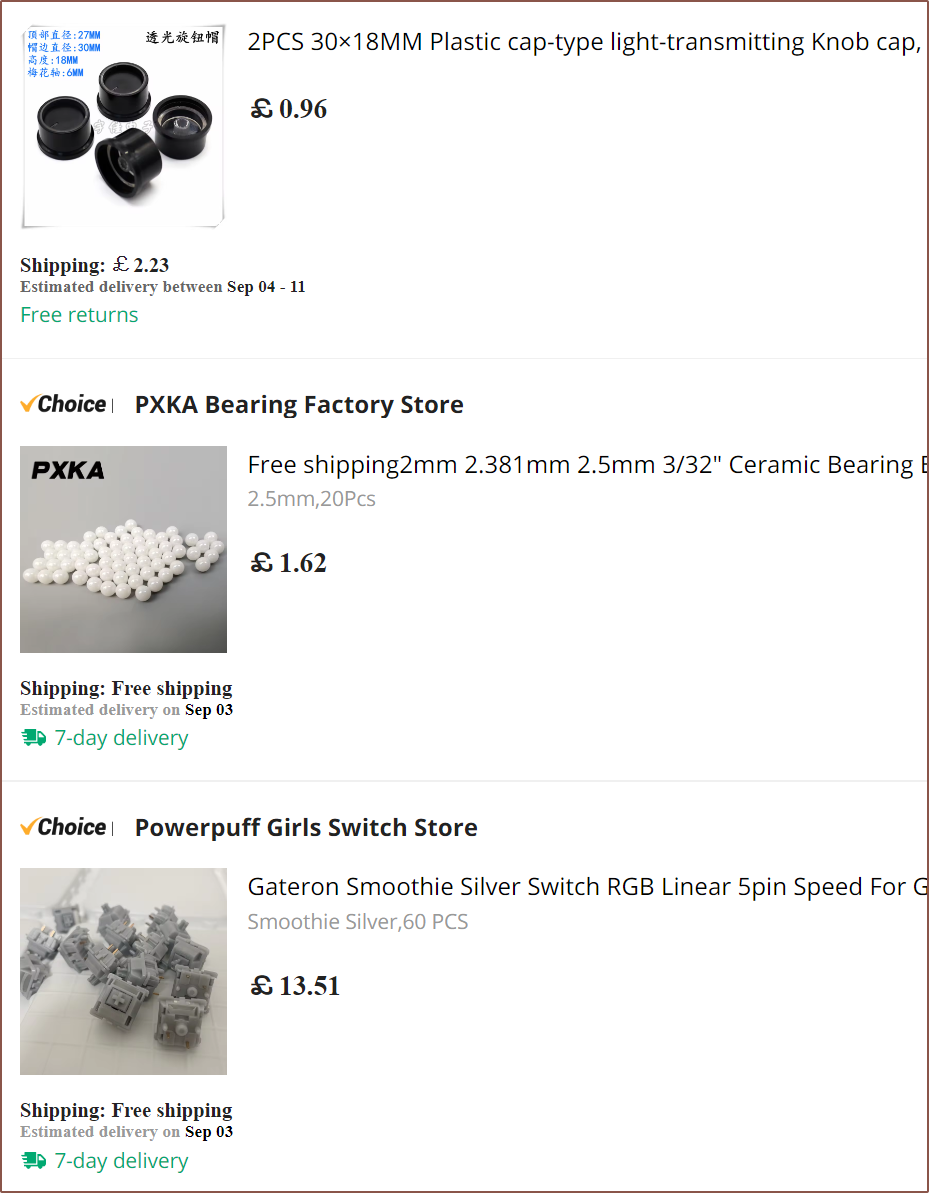
That got me thinking and that lead me to the Weekin WK-50, a bat-shaped keyboard that seems to have the same amount of buttons as the AirBerries but had features I wanted if I was to get a custom keyboard again: USBC, non-split so it can rest on my lap, backlit keys and hot-swappable switches. It also had the nice-to-haves of a trackball and rotary encoder. I looked into switches and quickly determined that I'd probably like the Gateron Smoothie Silvers for their 1.2mm +/- 0.3 actuation distance, which is even lower than Kaith Choc low-profile switches (1.5mm +/- 0.5).
 I didn't like the 1U keycap profile of the AirBerries, in part because they're awful for Taipo, so I searched for the flattest keycaps I could find. You can kinda tell I'm trying to make a low-profile keyboard without it actually being low profile. The only ones I found were 32pc sets of Doys keycaps:
I didn't like the 1U keycap profile of the AirBerries, in part because they're awful for Taipo, so I searched for the flattest keycaps I could find. You can kinda tell I'm trying to make a low-profile keyboard without it actually being low profile. The only ones I found were 32pc sets of Doys keycaps: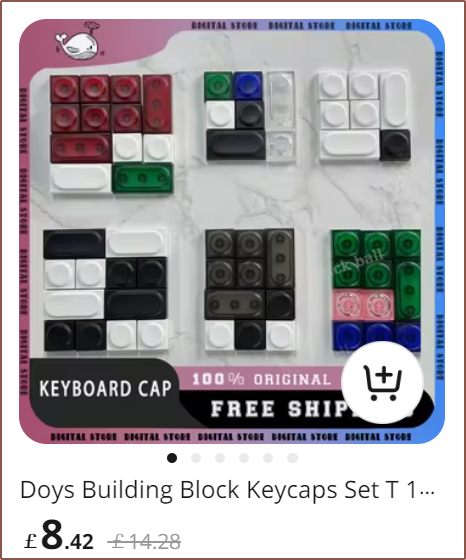 They look like Teenage Engineering buttons and I figured that the circular emboss would a) allow me to press on 2 keys without my nails getting in the way, and b) compliment the circular nature of trackball and encoder. Speaking of the encoder, I knew I'd need to find a transparent knob at one point because they look way better than the included one:
They look like Teenage Engineering buttons and I figured that the circular emboss would a) allow me to press on 2 keys without my nails getting in the way, and b) compliment the circular nature of trackball and encoder. Speaking of the encoder, I knew I'd need to find a transparent knob at one point because they look way better than the included one:

Receiving keyboards (wait, 'ds'?? plural?)
The thing is that the switches cost basically an entire wireless keyboard + mouse combo. Said combo even has custom, ergonomic-looking hexagonal keys! So I bought a Mofii Honey S. I'd gather more keyboard data that way.
I actually asked about hexagonally-aligned keyboards in the Keebin' with Kristina...
Read more »






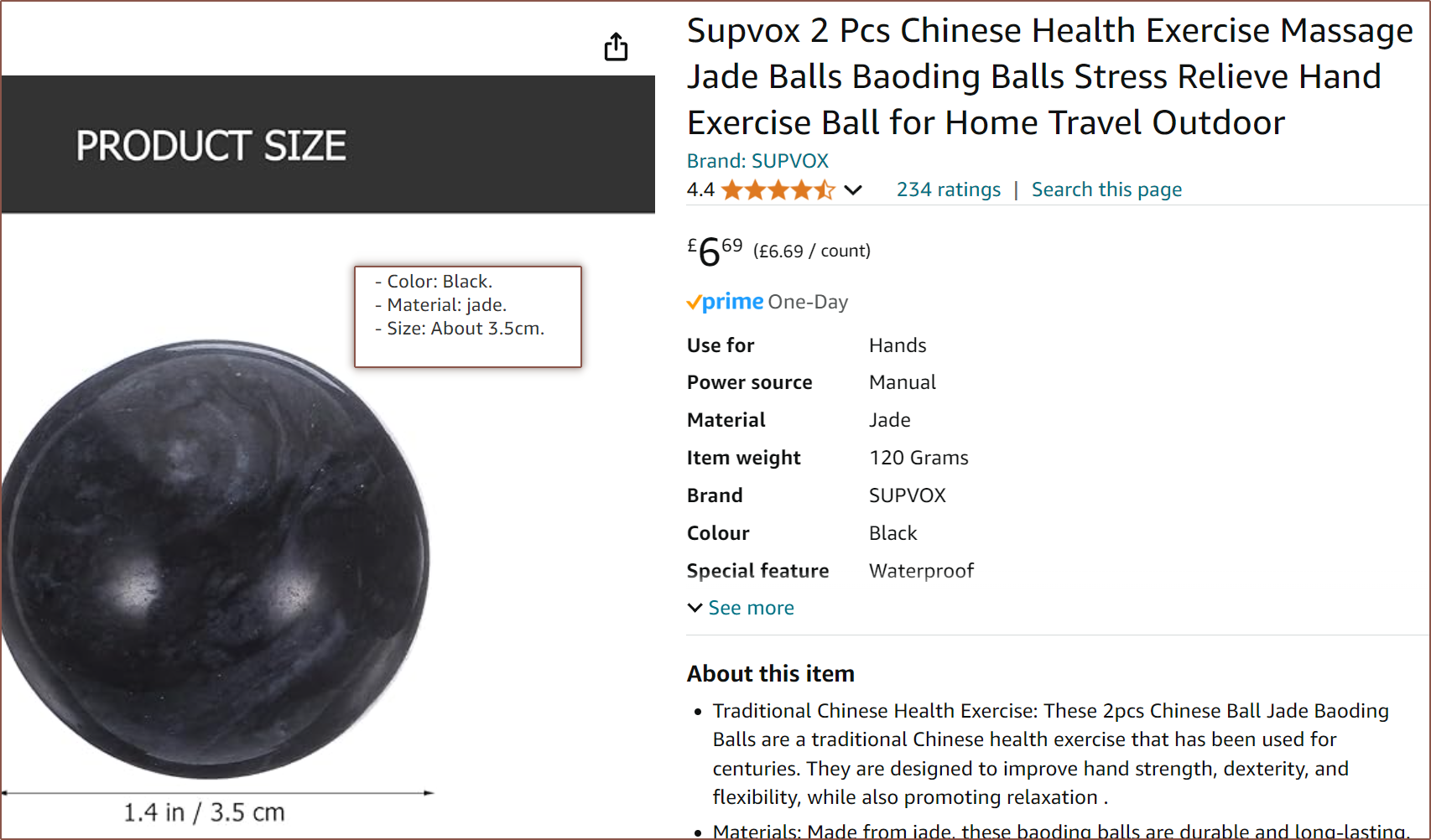
 Conveniently, both a black and a cloudy grey ball arrived:
Conveniently, both a black and a cloudy grey ball arrived: The black ball tracked mostly fine (and certainly better than the original grey ball) but the marble-like cloudy ball didn't at all. I correctly suspected this was because the balls were too close to the sensor, and found some m3 nuts to act as 2.3mm spacers. Now both balls would track but the cloudy ball would cause the mouse to jostle when stationary.
The black ball tracked mostly fine (and certainly better than the original grey ball) but the marble-like cloudy ball didn't at all. I correctly suspected this was because the balls were too close to the sensor, and found some m3 nuts to act as 2.3mm spacers. Now both balls would track but the cloudy ball would cause the mouse to jostle when stationary. 
 The balls track better, though I still feel that there's room for improvement so perhaps I need another 0.5mm of spacing.
The balls track better, though I still feel that there's room for improvement so perhaps I need another 0.5mm of spacing.


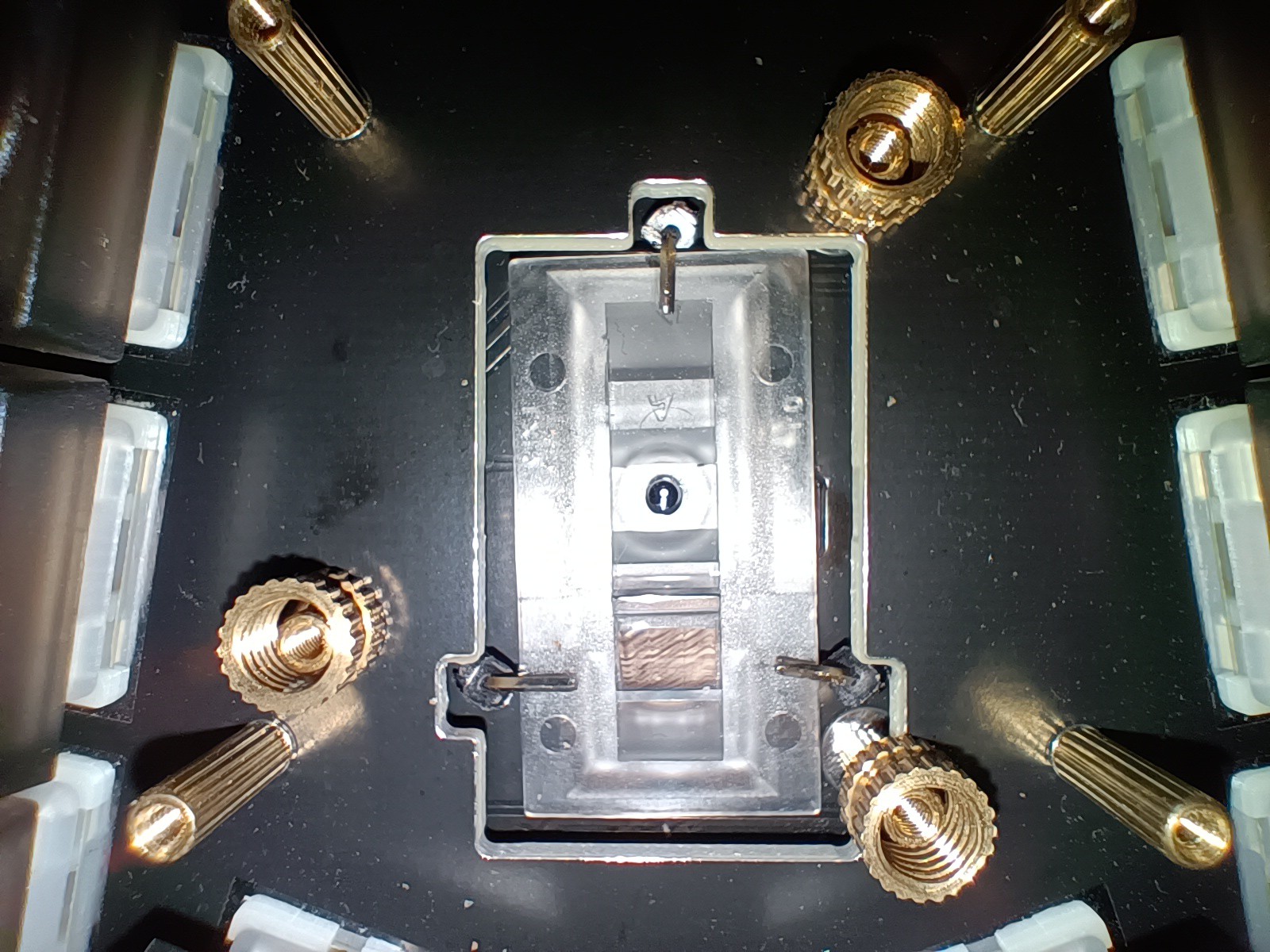
 The ball is mostly illuminated by the knob LED lights, so I'll keep that in mind when considering for a better knob (as the original one is too short and is opaque).
The ball is mostly illuminated by the knob LED lights, so I'll keep that in mind when considering for a better knob (as the original one is too short and is opaque).


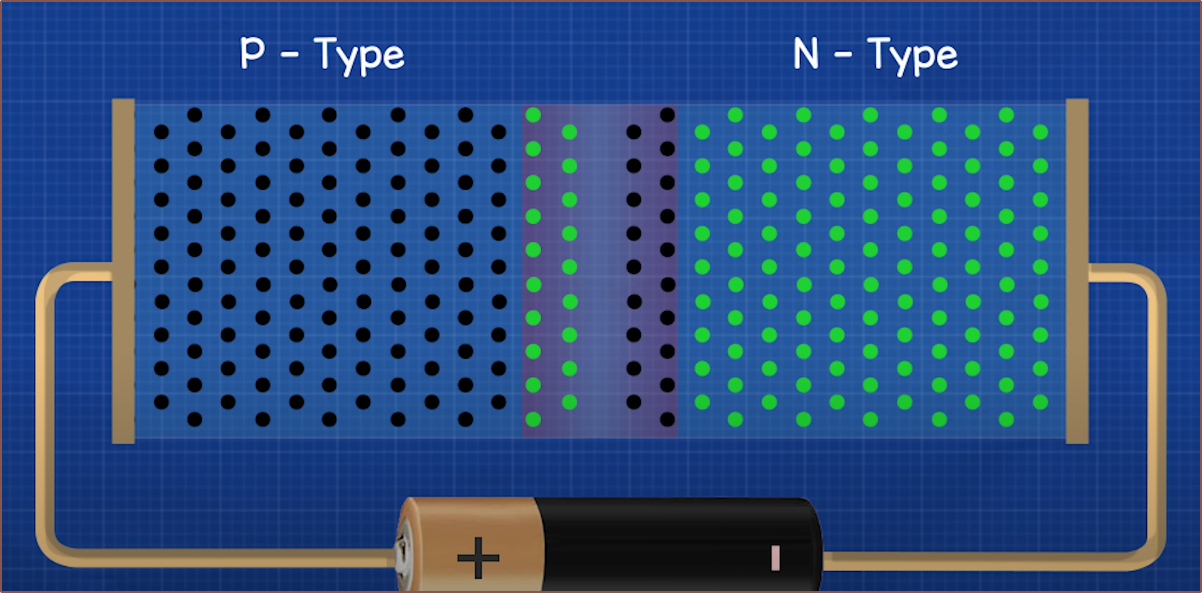
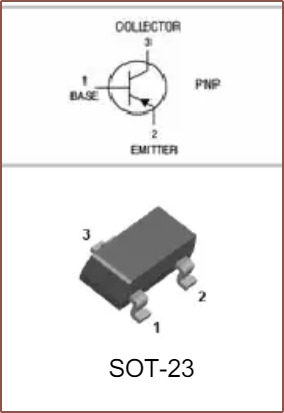
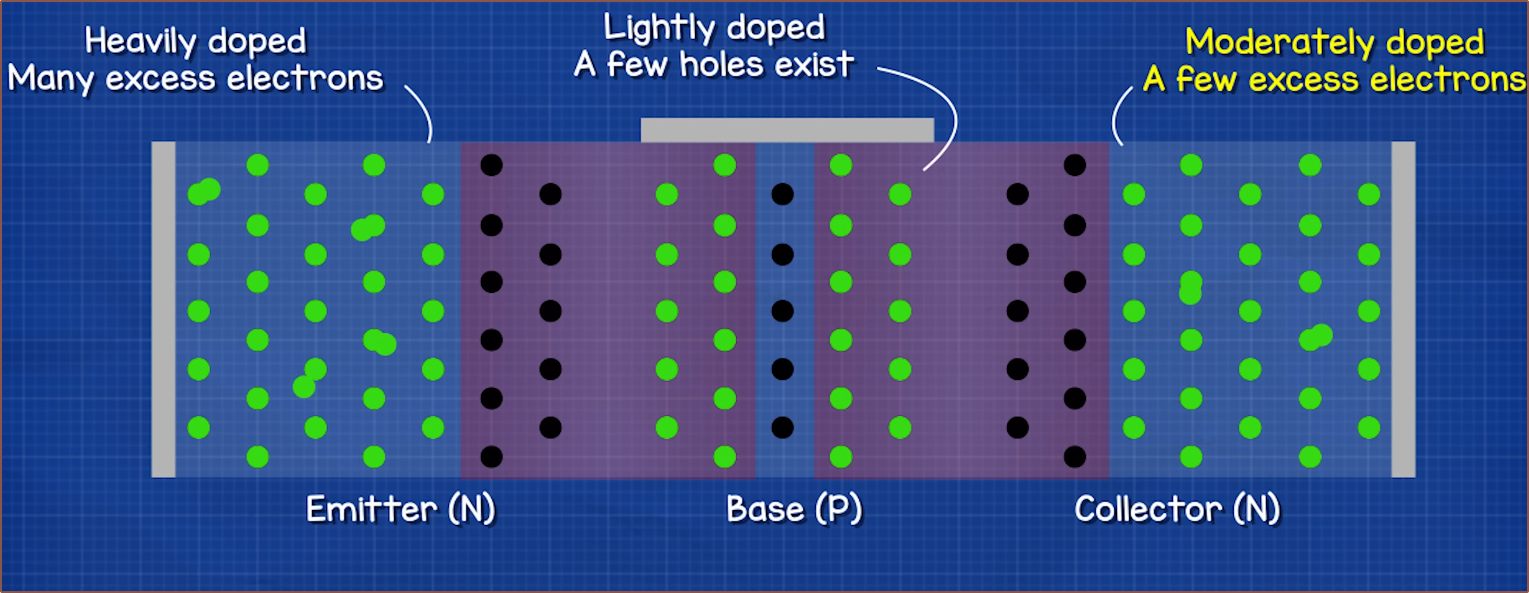 I noticed that the transistor looked like 2 diodes put together. I looked into it and found symbols like the below:
I noticed that the transistor looked like 2 diodes put together. I looked into it and found symbols like the below: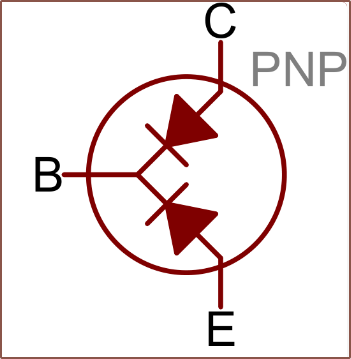 Since matrix scanners only scan one row/column at a time, it's likely safe to assume that the designers of the WK-50 used transistors as alternatives to dual diodes (e.g. BAT54C).
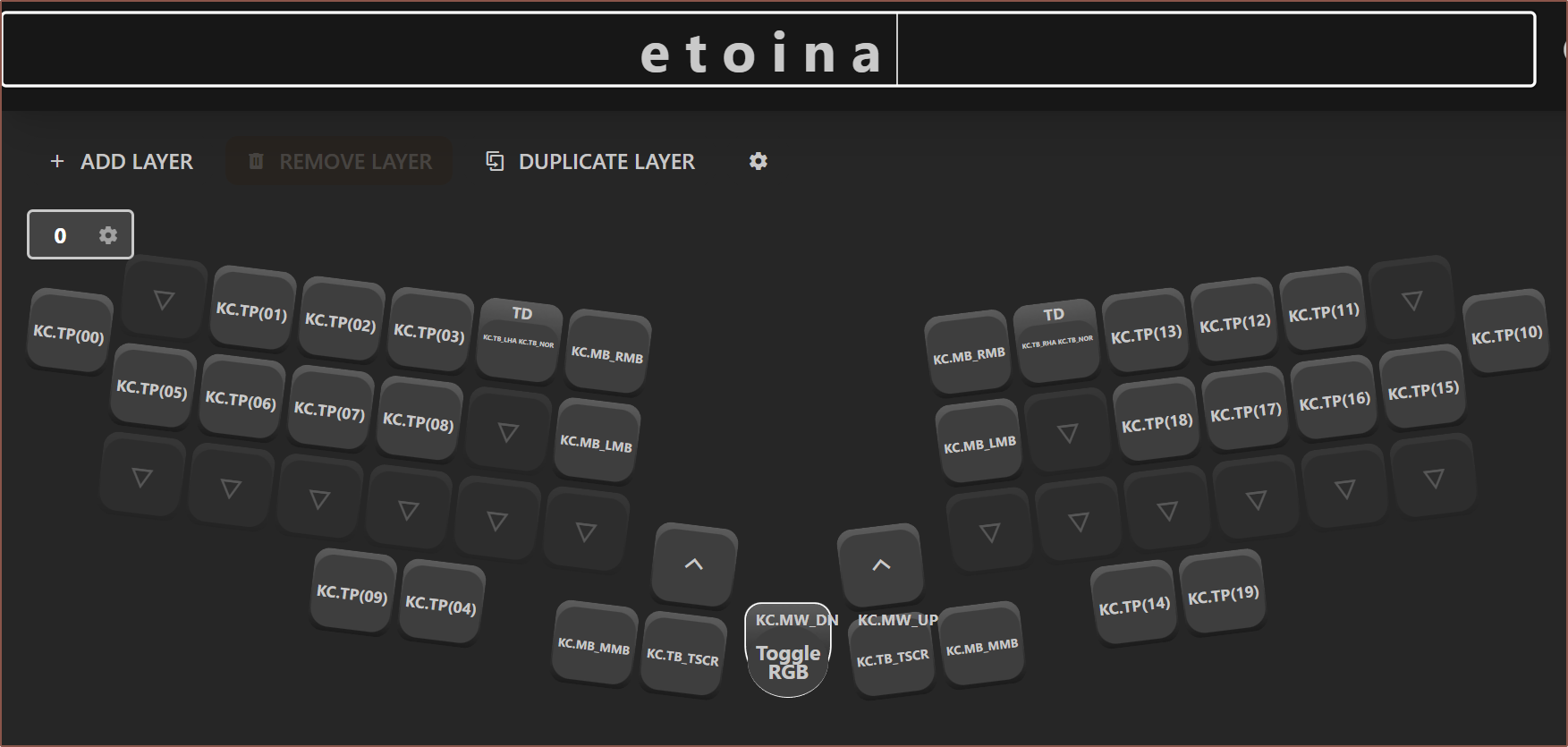
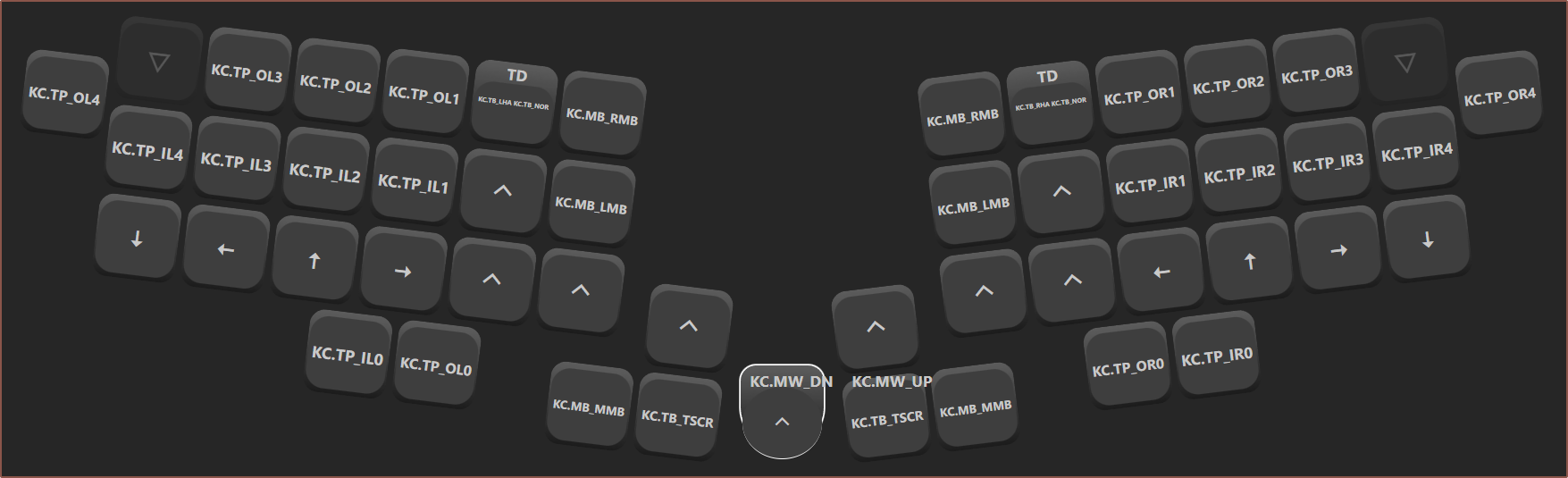
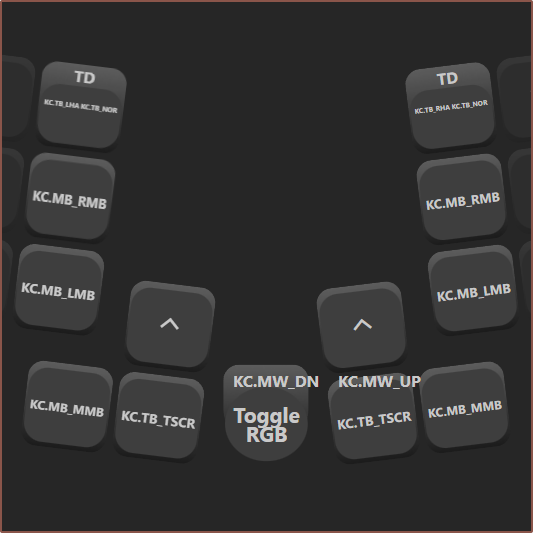
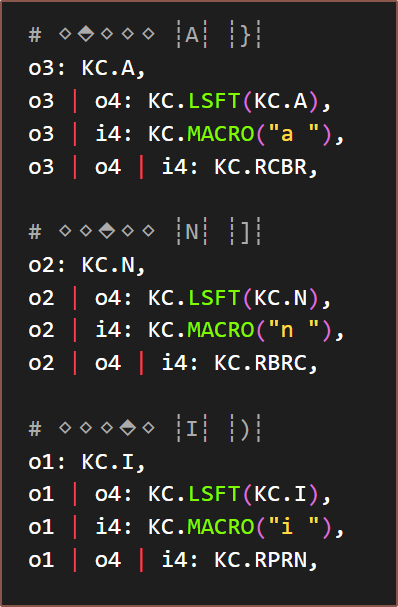
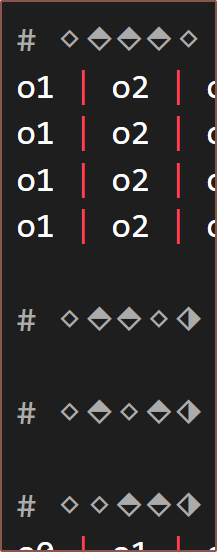
Since matrix scanners only scan one row/column at a time, it's likely safe to assume that the designers of the WK-50 used transistors as alternatives to dual diodes (e.g. BAT54C). 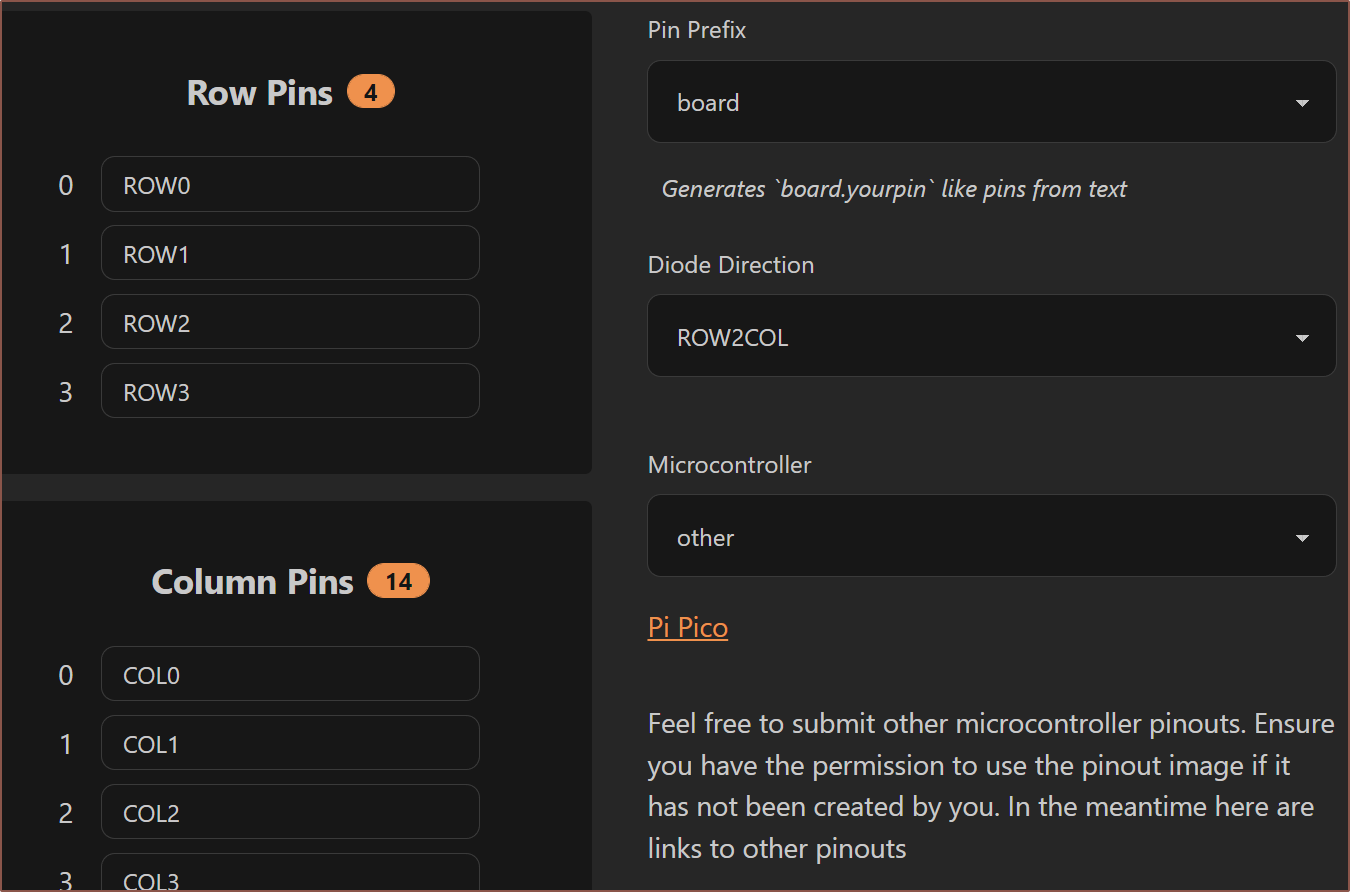 Then I got the ChordMap, moved the keys in the layout area to approximate the keyboard whilst still looking tidy and added the encoder pins:
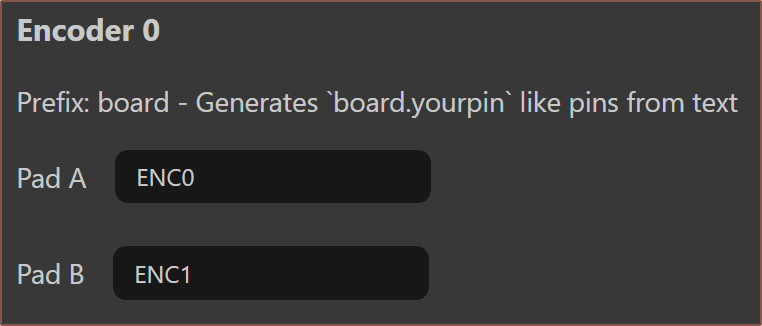
Then I got the ChordMap, moved the keys in the layout area to approximate the keyboard whilst still looking tidy and added the encoder pins: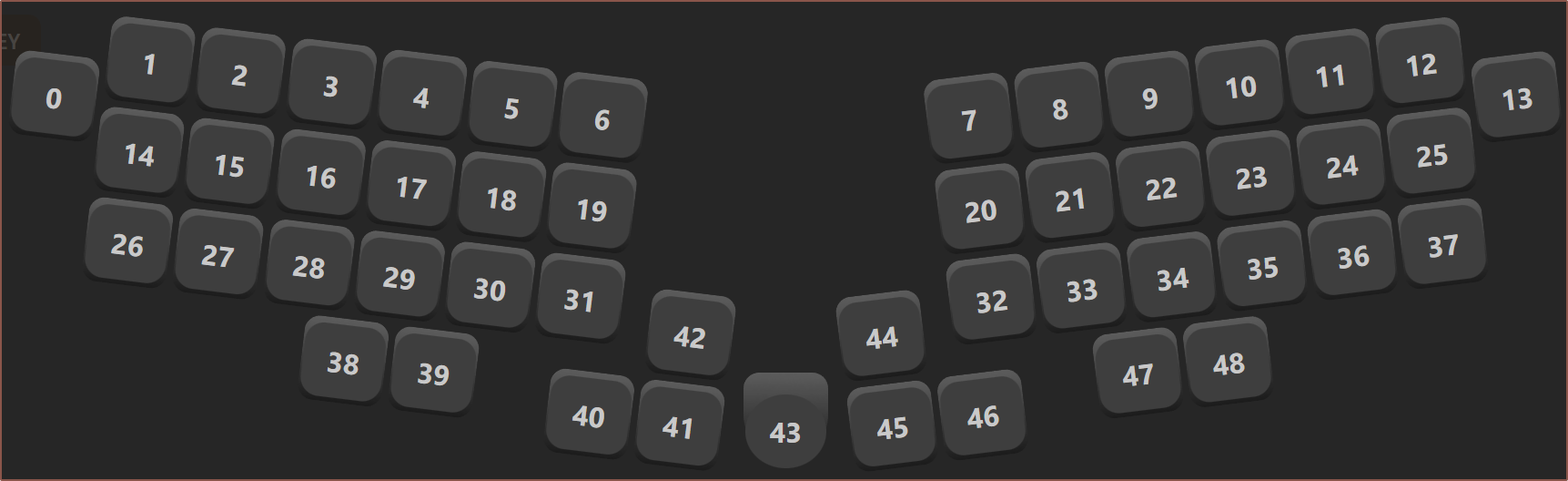
 I also needed to download the neopixel library and put it in the lib folder:
I also needed to download the neopixel library and put it in the lib folder:
 So it's obviously and totally possible!
So it's obviously and totally possible! 
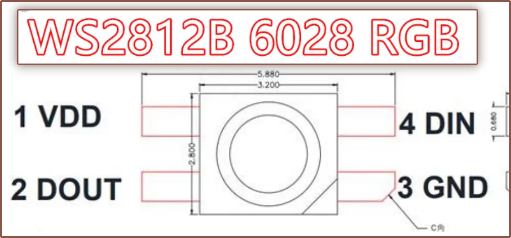
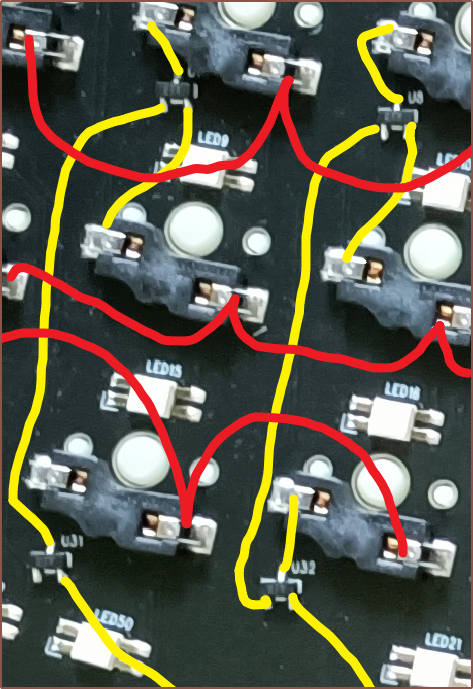
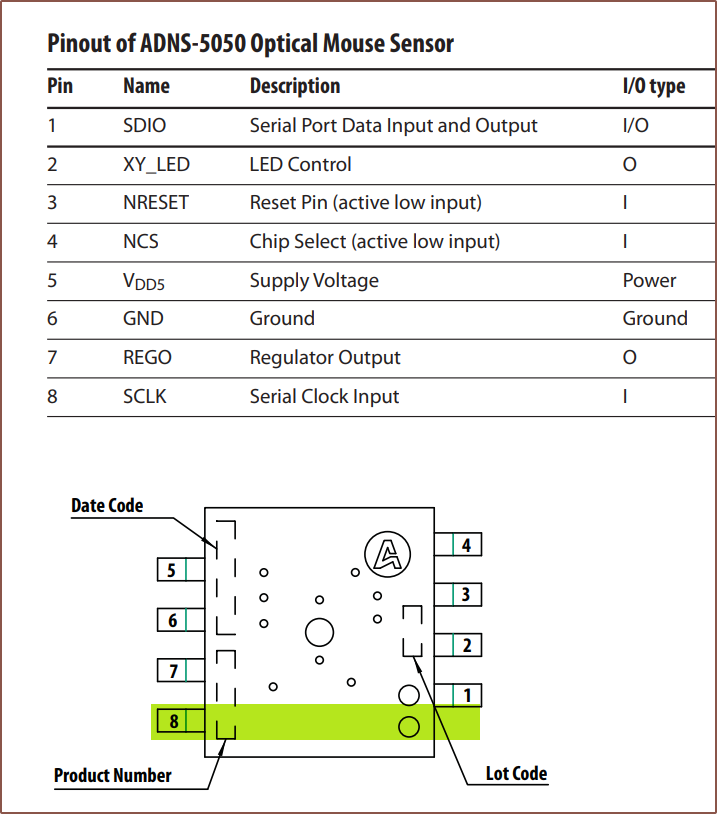 It's nice to know that the LED is actually controlled by the sensor. Also, I don't think NRESET is connected to the RP2040.
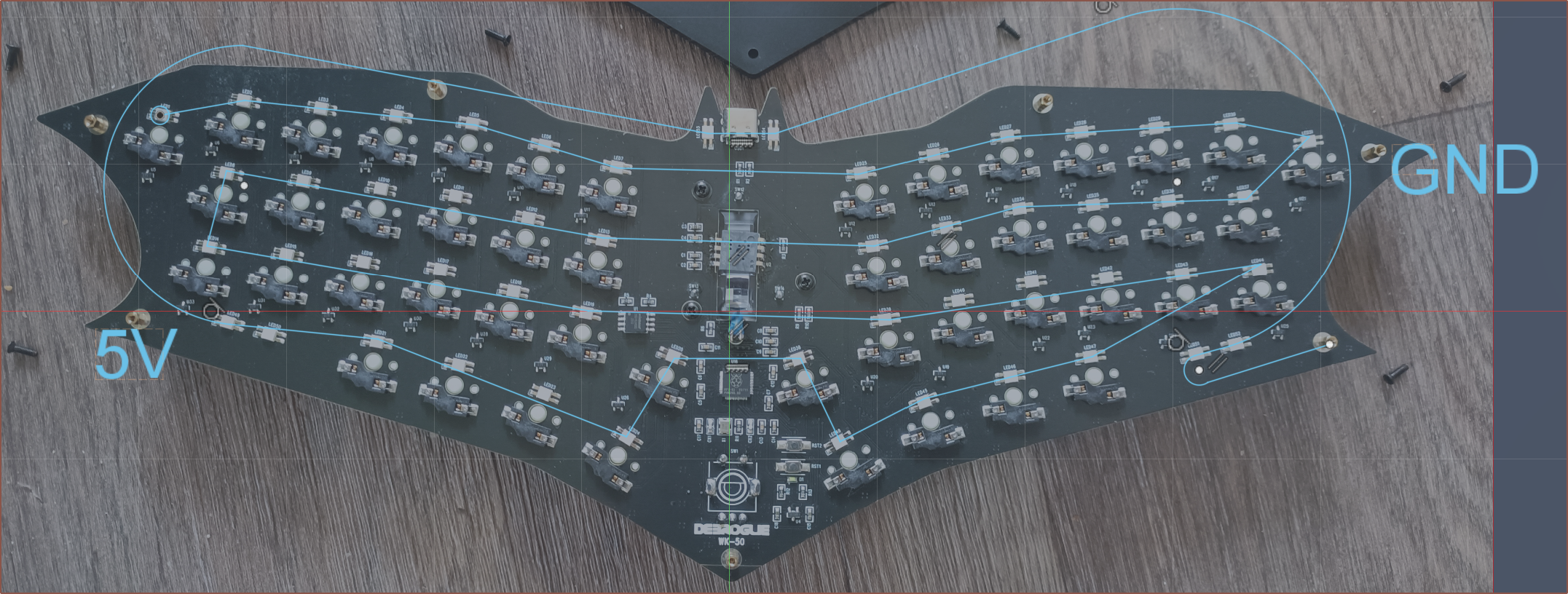
It's nice to know that the LED is actually controlled by the sensor. Also, I don't think NRESET is connected to the RP2040.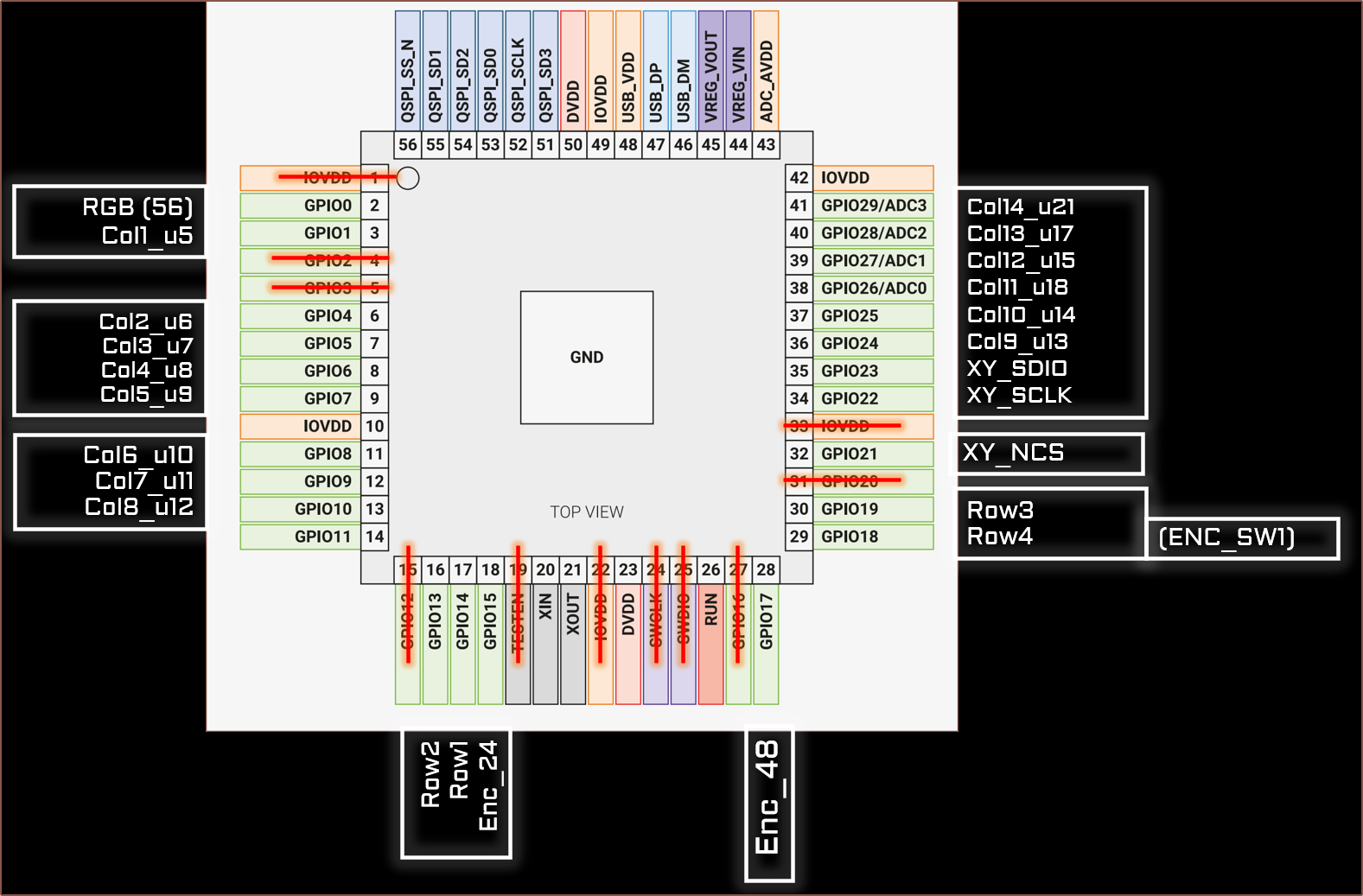 I've crossed off pins that don't visibly look connected to anything. I used them as a fiducial marker. The "_uXX" on the columns is the identifier for the topmost transistor on the column.
I've crossed off pins that don't visibly look connected to anything. I used them as a fiducial marker. The "_uXX" on the columns is the identifier for the topmost transistor on the column.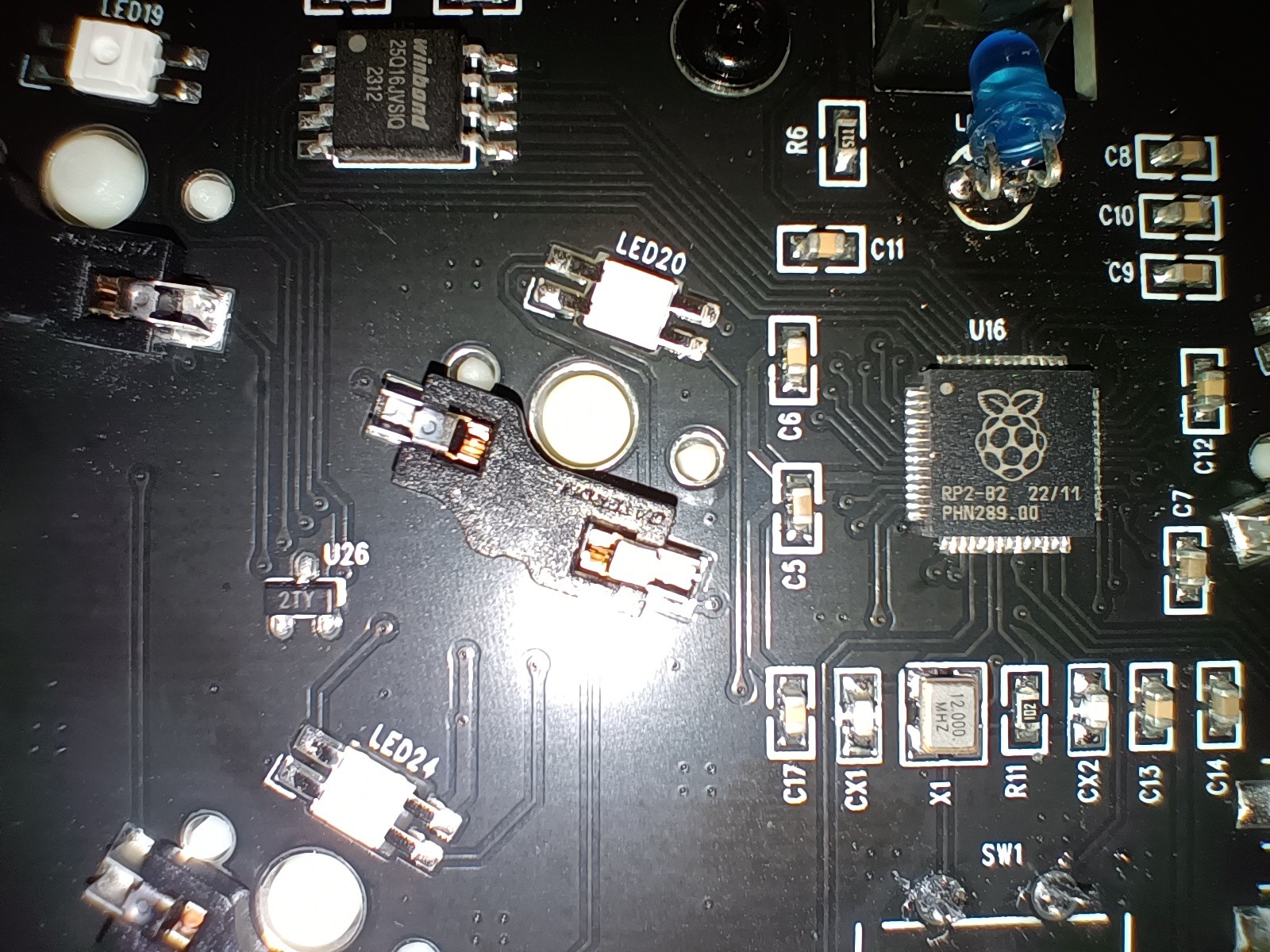 Enc_24/48 is the pin closest to LED24/48 respectively.
Enc_24/48 is the pin closest to LED24/48 respectively. 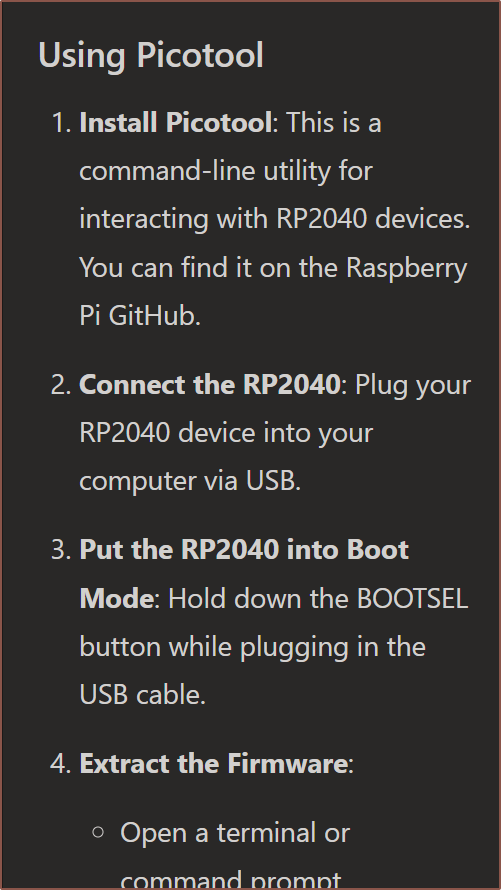 It seemed simple enough.
It seemed simple enough.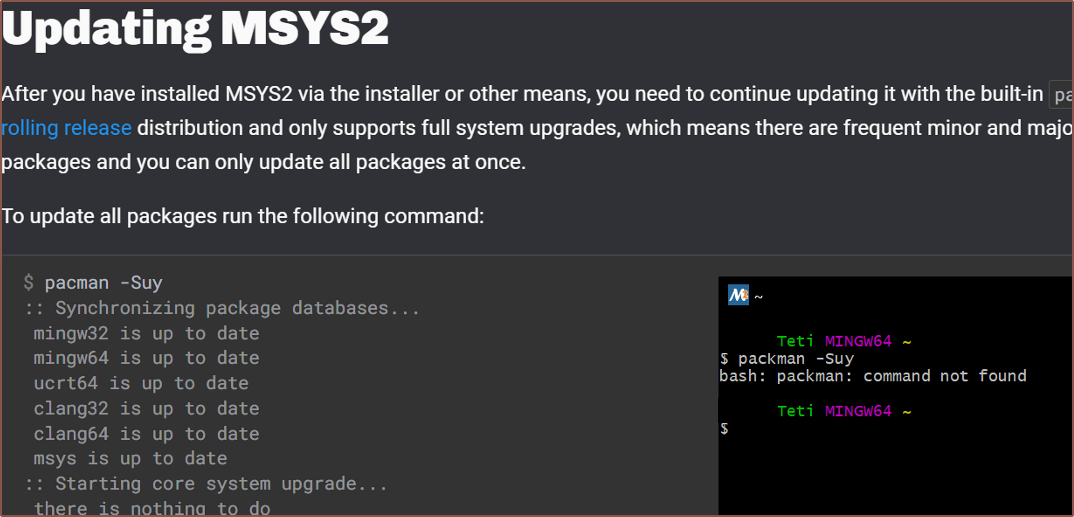 The solution was to add
The solution was to add So I downloaded that and I indeed didn't have a driver:
So I downloaded that and I indeed didn't have a driver: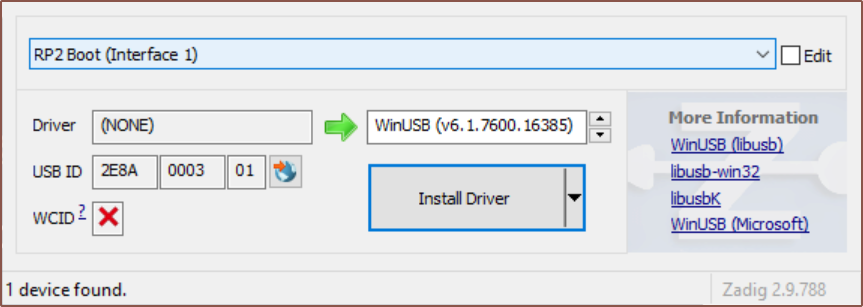
 I saved again as a .bin and I got a 2MB file. Hopefully this is what I need if I need to restore from backup.
I saved again as a .bin and I got a 2MB file. Hopefully this is what I need if I need to restore from backup.
That, my friend, is a lovely build. Thank you for posting a build log!