-
Performance review
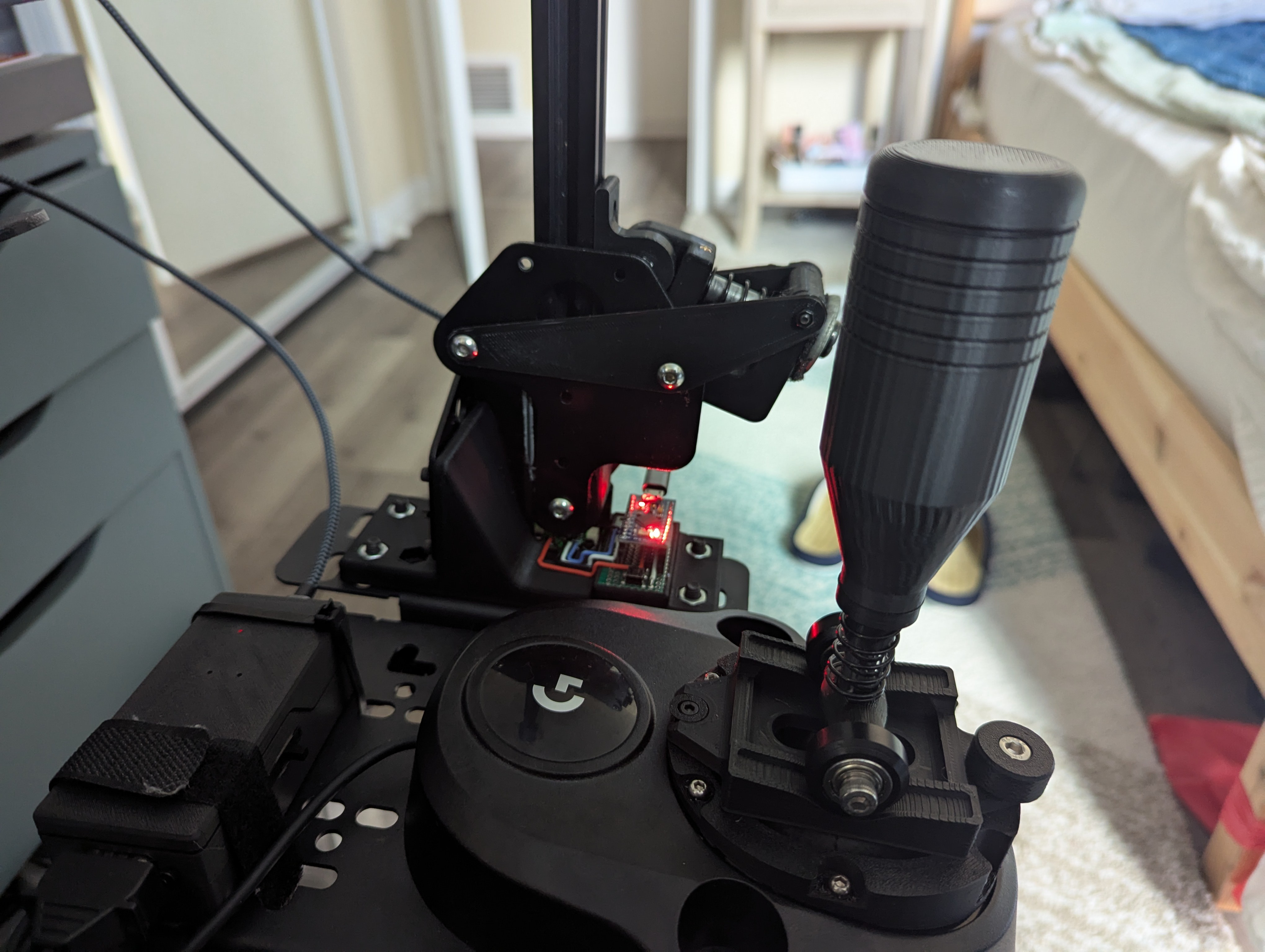
02/17/2025 at 19:06 • 0 commentsSo far the handbrake is better than nothing, but there are some big areas of improvement.
First, the return action isn't that great. There is basically no damping besides a small piece of foam, and if I pull and release the lever without being gentle it tends to shake and rattle the whole assembly apart. The spring I used initially was too long and made alot of noise. I bought some 15mmx40mm springs from Amazon for my G29 quick-ish release sequential shifter mod and they fit perfectly in the handbrake. I am looking at some 4 inch gas struts typically used for cabinets to provide damping, as I read RC shocks don't provide much damping force.
![]()
Second, there was some weird issue with EA WRC, opentrack set to vjoy emulation, and the arduino serial port. It would basically break all three things at once, and I don't really know if anyone else would be experiencing the same thing. I redid the electronics a little nicer on some perfboard and added a reset switch as a bandaid solution for now. I found I never soldered the SCA pin on the magnetometer so I hope that helps fix things.
![]()
Last, the constraint of using only ender 3 hardware makes space an issue. There is a lot of rubbing and squeaking going on. Hopefully I can find some cheap 4mm ID aluminum tube to make better spacers.
The magnetometer works surprisingly well, I just need to tweak the signal filtering to be a little more responsive.
-
6: V0.9 Finished
01/24/2025 at 00:09 • 0 comments![]()
I want to refrain from calling it V1 yet as it's still all PLA, but I am definitely going to be using it until things start breaking. It felt good replacing all my future tense with past tense in the project description. Although everything technically works, there are a few issues that should be solved. For one, the pro micro usb port is way too close to my shifter when mounted. I got all the wires nicely cut and routed so I really don't want to move the pro micro but I will probably need to unless I get ahold of a right angle micro usb plug. Or a left angle one since I don't remember how the naming convention works. My main concern is getting the solder out of the through holes, since I destroyed my desoldering pump.
![]()
Another Issue is the way the pivot assembly all goes together. There is no good method to adjust and tighten the pivoting plunger arm assembly.in a user friendly way. Basically I have to dry fit the assembly to make sure the plunger is at the correct angle, disassemble it to tighten the screws, and then reassemble it. There is also a decent amount of flex if you pull too hard, which might be unsolvable without making everything super thick.
I was trying to put a BOM together but I don't think anyone sells an entire replacement x gantry, or even the brackets I used. If you're up for a double project, you could try scooping up a Facebook marketplace special ender 3 and then convert the original gantry to linear rail (don't actually do this). If you would like a list of parts anyway let me know. I also don't have an intuitive way of recording gameplay along with recording video of the actual handbrake in action, but I could try figure that out as well if anyone wants.
Full disclaimer about the code; I used AI to help me initialize the magnetometer and joystick and map the sensor values to joystick values. I think I could have eventually figured it out in a few hours to days by reading through forum posts and documentation, but the AI generated code had me up and running in less than half an hour. I did have to debug and tailor the code for my specific use case, but for someone who opens up VSCode maybe once a quarter it was a huge help. The magnetometer itself was originally used for Salim Benbouziyane's DIY spacemouse project that I ended up not using much (https://www.instructables.com/DIY-Space-Mouse-for-Fusion-360-Using-Magnets/). I also adopted his idea of filtering the signal, and applying a calibration offset at startup. The idea to use the Joystick library was taken from AMStudio on youtube, specifically his project to convert a Logitech shifter to usb (https://amstudioprojects.com/shifters/). The shifter project was a main inspiration for this one, even though they share little in common besides being sim racing peripherals.
-
5: Redesigns
01/23/2025 at 03:32 • 0 comments![]()
I did not do the things I set out to in the last log. I found a good spring inside a cheap spring loaded desoldering pump I had kicking around. I added some foam backer to the plunger stop to act as a sort of damper. Some of the holes I left for heat set inserts are too close to edges to be usable. I will try getting this programmed before I start printing the final batch of parts. I also think I could make the grip a little bit wider.
-
4.5: Printing
01/17/2025 at 23:14 • 0 commentsI have begun printing parts out of PLA to dial in dimensions. I am hoping to have the final pieces printed out of ASA but I am known for using my prototype parts indefinitely until they fail.
![]()
This is a good time to remind myself to double check the accuracy of any 3D models found on the internet. The 4 main mounting holes for the ender brackets are in the completely wrong place, and the pro micro model I found was too small. The Ender 3 has gone through so many micro revisions though so I can only blame myself for that one.
![]()
My wheel and pedals are expected to arrive in less than 24 hours. All I need to do is fit test everything with PLA before I go to bed, have the ASA prints run over night, and then code and wire the electronics tomorrow morning without anything going wrong.
-
4: Final Design
01/13/2025 at 21:15 • 0 comments![]()
The design is nearly finished, any last changes will probably be done once the initial print is put together. I am hoping to reuse some of the threaded holes on the extrusion for mounting the return spring. If that doesn't work I will have to come up with some sort of solution which shouldn't be too hard.
I need to wire up the components and start working on the code. Hopefully I can steal from other people's code used for similar projects I have made.
-
3: Even more design
01/09/2025 at 21:17 • 0 commentsThe mechanical design is now a bit more fleshed out. The compressive springs I have are too small to fit over the bolt I am using for the plunger, so I will need to rig up some way to use an extension spring. I am bad at making ergonomic things but I did my best to make some comfortable looking grips.
![]() Now I need to make a place for the magnet and all the electronic components. It would be cool to route the wires through the hole in the front of the base that is typically used by a motor shaft, but I'm not sure if there will be enough room.
Now I need to make a place for the magnet and all the electronic components. It would be cool to route the wires through the hole in the front of the base that is typically used by a motor shaft, but I'm not sure if there will be enough room.
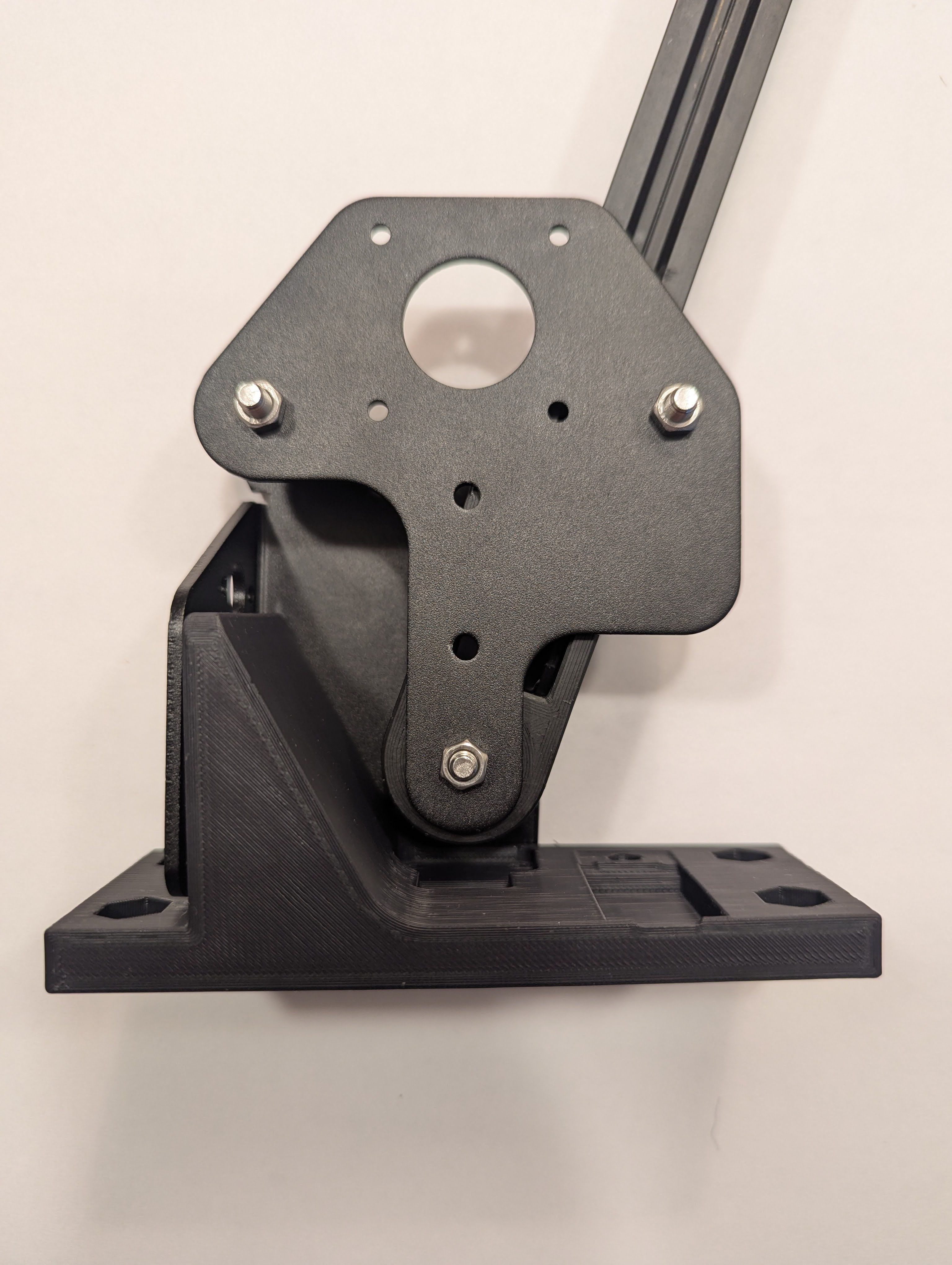
Cross section The bolt used as the plunger will be held into its pivot by a set screw. The bracket that the plunger works through is mounted to the frame by slipping over the spacers in the rear, and is braced by two side brackets. I am hoping a long 3mm bolt through the rear most mounting hole (top right of cross section) will provide more structural support than a continuous 3d printed part where the force might cause layers to shear apart at the sides. I will also need to thicken the handle pivot attachment to reduce any lateral movement of the handle during use.
I need to tackle the least fun part of the project now which will be putting my 3d printer back together
![]()
-
2. More Design
01/06/2025 at 18:04 • 0 comments
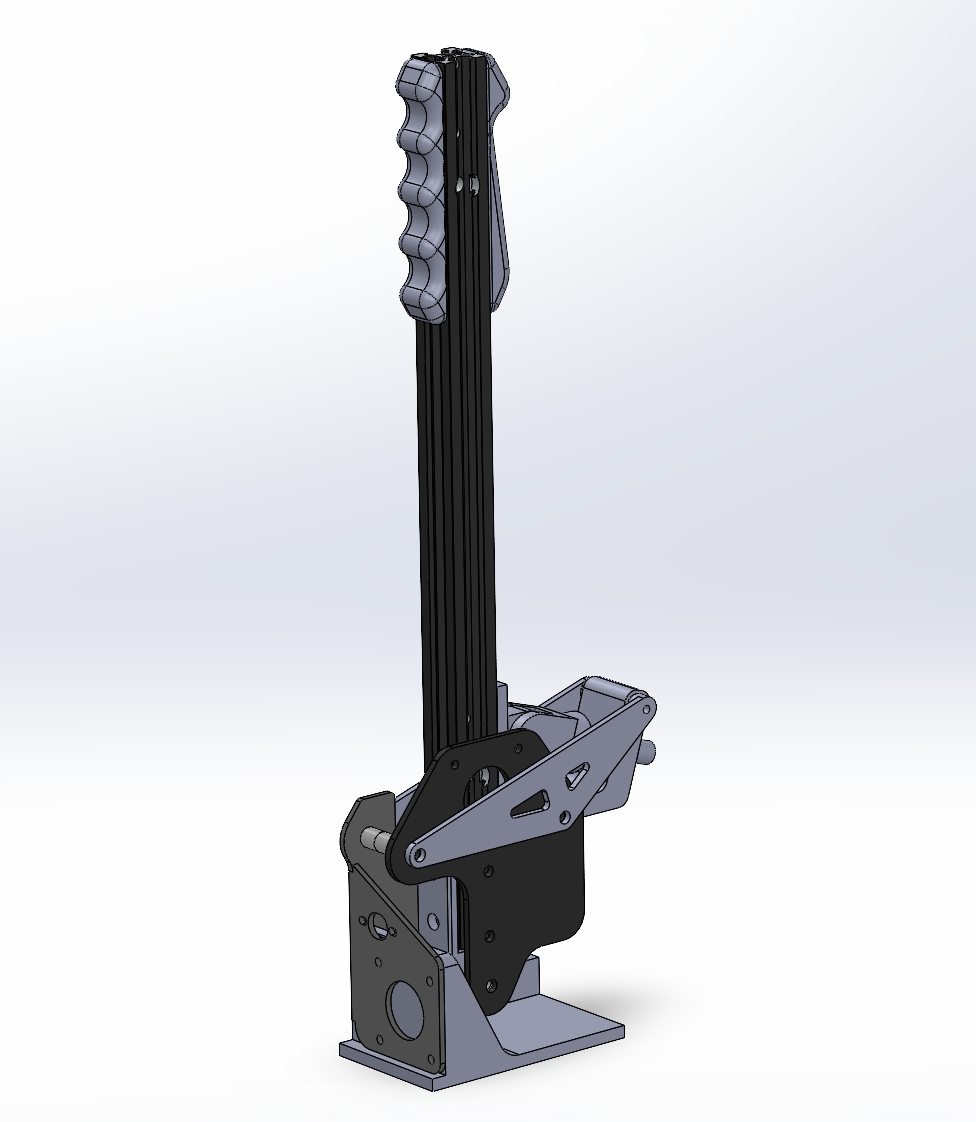
Updated Handbrake Design After playing around in CAD, I decided to rotate the whole assembly, and flip the orientation of the extruder motor bracket. This eliminates offsetting the whole assembly like my initial design, and gets rid of some clearance issues I ran into with the handle pivot.

Closeup View The design change also allows for equal range of movement both forwards and backwards. There is now potential for this to be both a handbrake and sequential shifter, but that sort of thinking is way outside the project scope. I will just focus on the handbrake action now so this doesn't get added to the unfinished project shelf.
After some consideration I will now be trying to use a 3 axis magnetometer rather than an analog stick. I have one lying around, and it sounds easier than trying to design a linkage mechanism for mating the handbrake to the analog stick.
I found an old pair of no name skateboard trucks that uses a removable hex bolt as the kingpin which I will try to use as a plunger-like return mechanism for the handle. I will try to have the plunger attach to the handle and utilize the aft stack of spacers as a mount for the plunger.
-
1. Beginning
01/05/2025 at 22:30 • 0 comments
Ender 3 Pro X gantry After converting my Ender 3 Pro to core XZ I had the whole X gantry assembly sitting around for a while. I found it again while looking for things I could use to possibly make a sim racing hand brake out of. The steel bracket assembly that rides the left Z extrusion is actually quite stiff, so I figured I could use those pieces and the X extrusion itself as the basis of the hand brake.

Rough Design I downloaded a model of the Ender 3 Pro and threw together this rough idea. I will probably 3D print a foundation for the Extruder motor bracket to mount to. I flipped the X motor bracket around so it will have more support sitting on the foundation. I am hoping to use the X motor mounting holes to mount the joystick. I haven't thought much about how the spring action will work, but I am hoping to incorporate skateboard bushings for some moderate resistance without having to buy any springs. I also have this set of springs but I'm not sure if any of them will be stiff enough (https://www.amazon.com/dp/B000K7M36W?ref_=ppx_hzsearch_conn_dt_b_fed_asin_title_2&th=1).
")
Flipped X Motor Bracket (Darker Part) Looks promising so far but I've been wrong before
Analog Sim Handbrake
A sim racing handbrake based mostly around an Ender 3 Pro X Gantry, an Adafruit TLV493D, and a pro micro






 Now I need to make a place for the magnet and all the electronic components. It would be cool to route the wires through the hole in the front of the base that is typically used by a motor shaft, but I'm not sure if there will be enough room.
Now I need to make a place for the magnet and all the electronic components. It would be cool to route the wires through the hole in the front of the base that is typically used by a motor shaft, but I'm not sure if there will be enough room.





")