 Hans Jørgen Grimstad
Hans Jørgen GrimstadThe CyberGears are 24V BLDC motors with CAN interface (I believe that they can tolerate up to 30V).
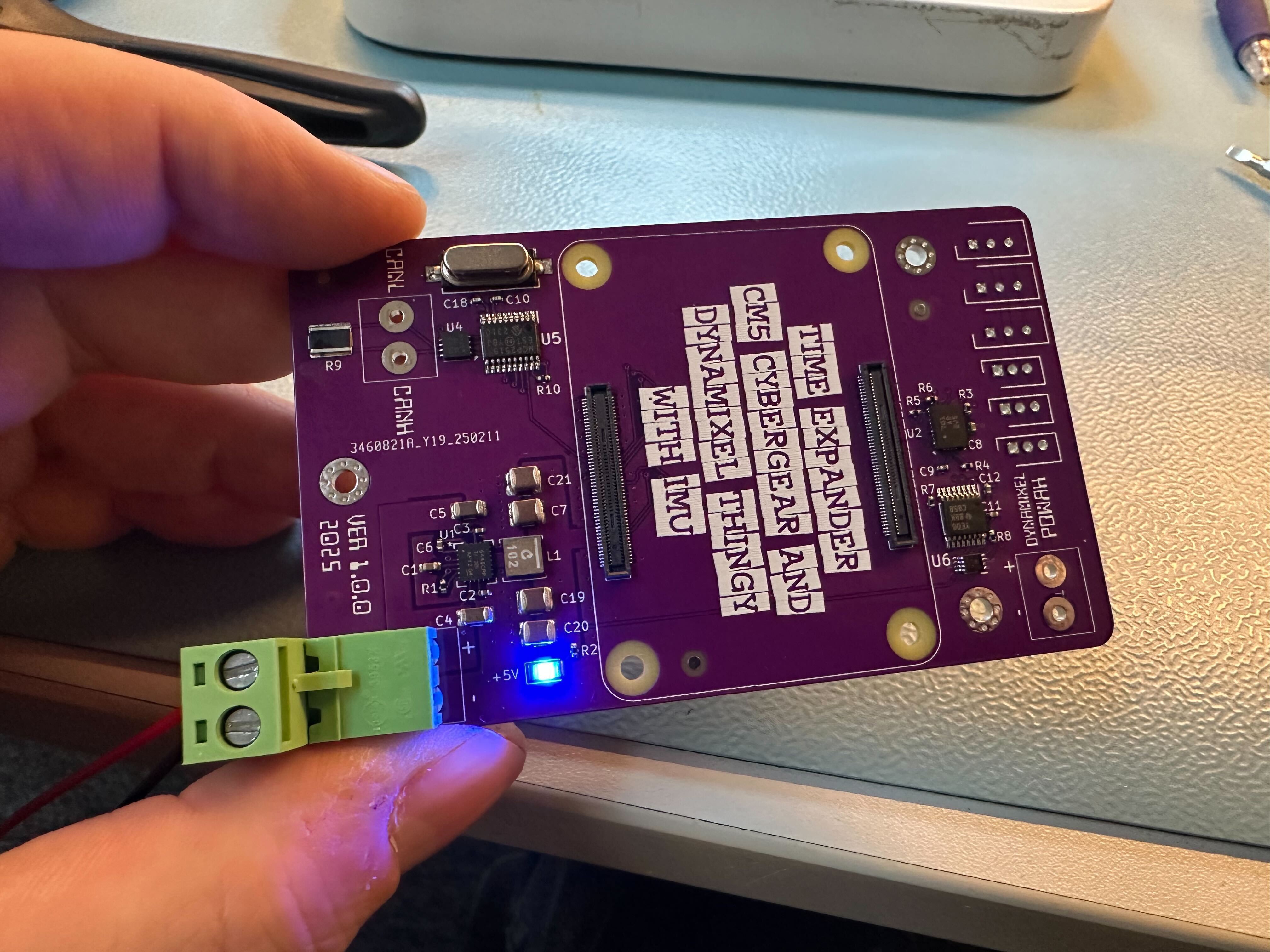
Ignoring passive components, the BoM currently consist of:
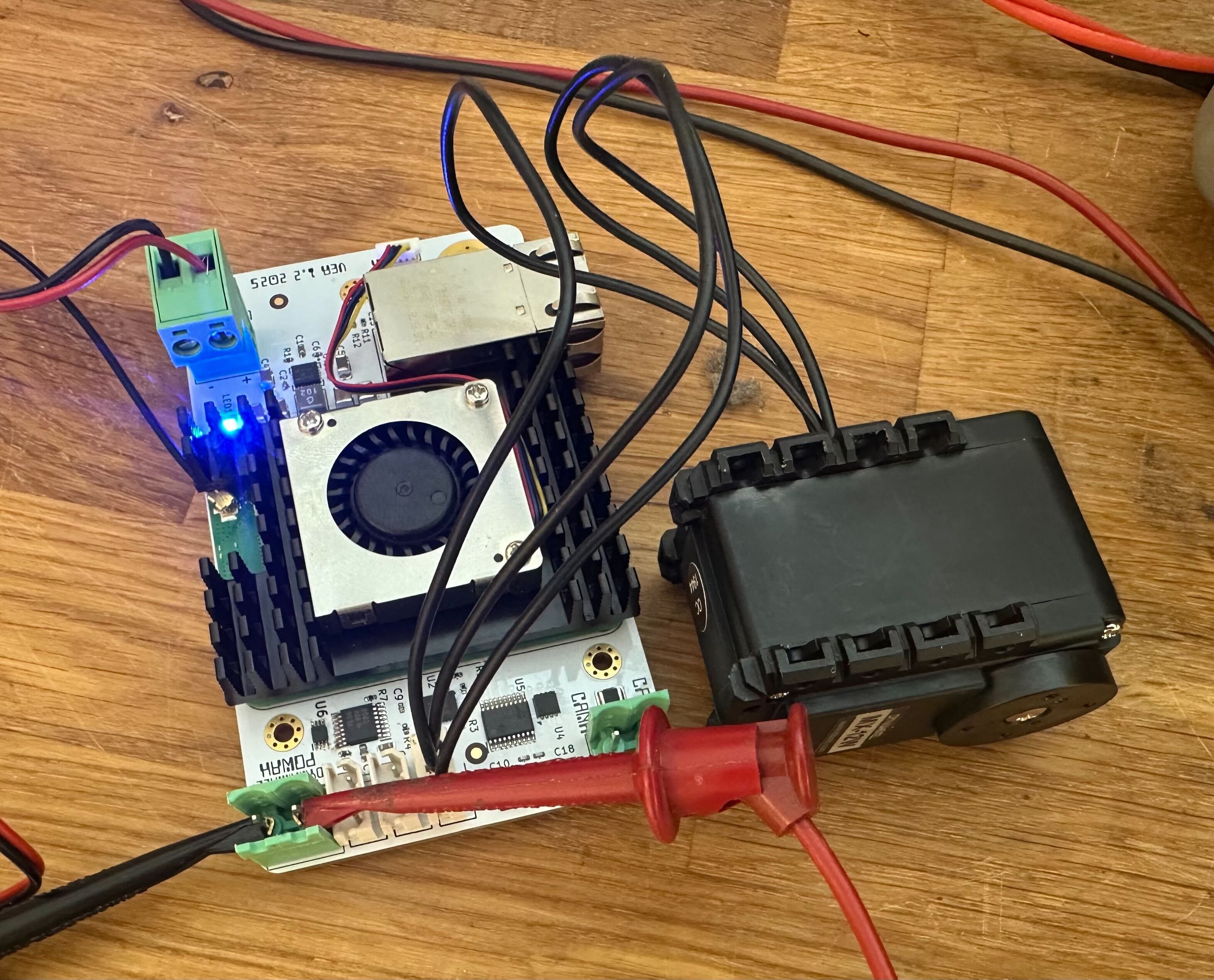
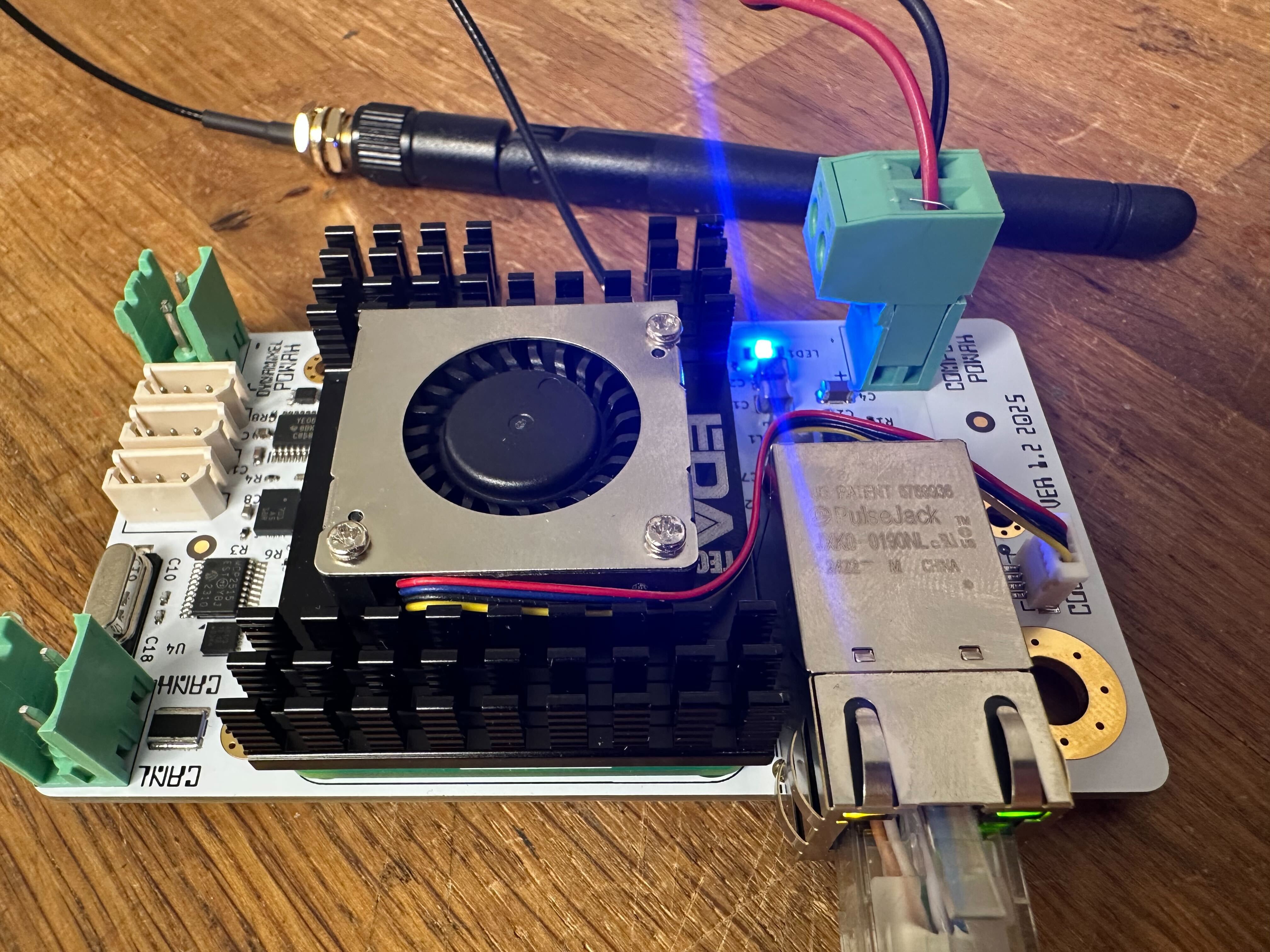
* Raspberry Pi Compute Module 5
* LM64460 Buck converter (max 36V input / 5V 6A output)
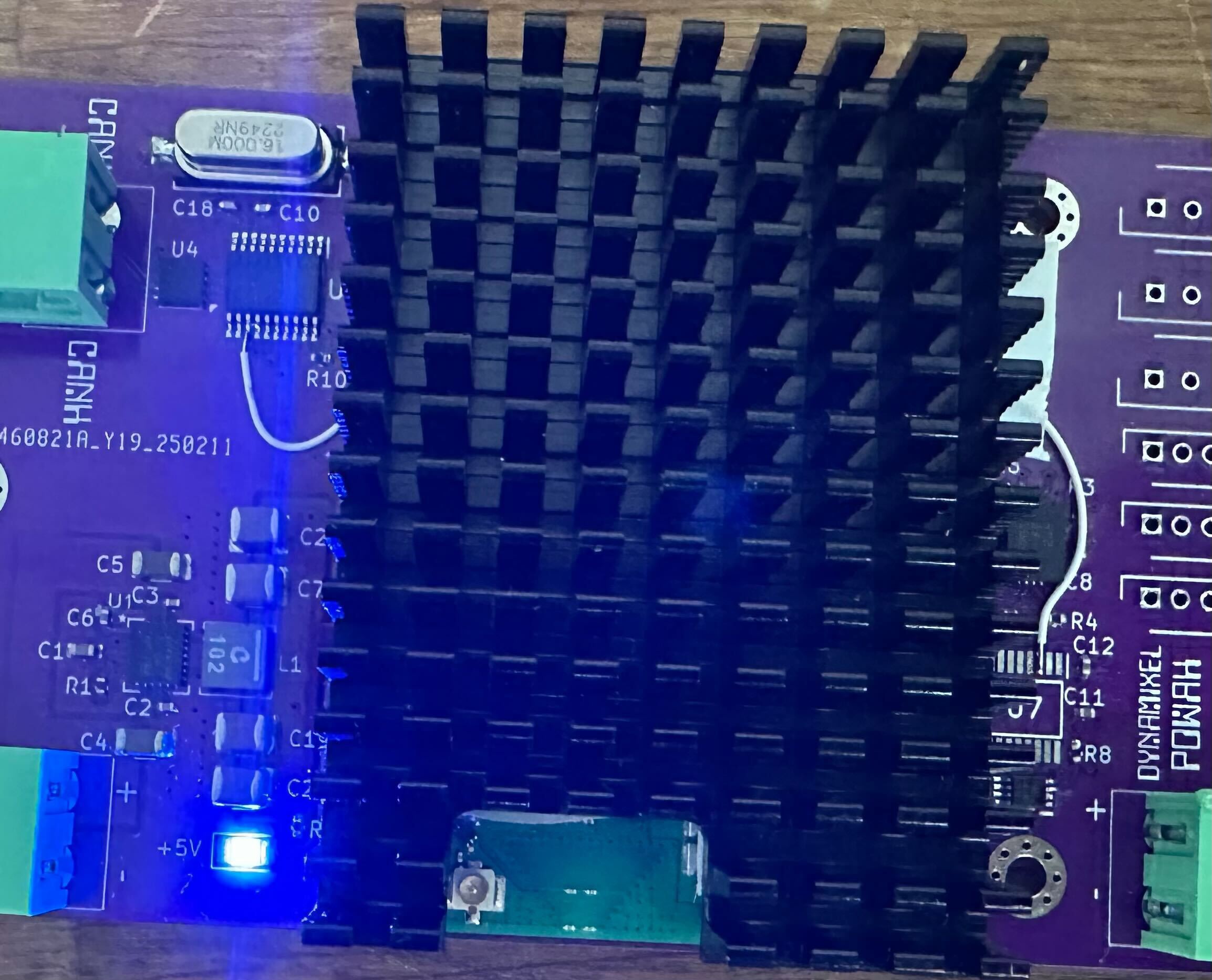
* MCP2515 CAN controller
* TJA1051 CAN transciever (The '51 has configurable I/O voltage reference)
* BNO055 IMU (NRND, but I will use it as long as it is available since it has 9 axis in one package and it is easy to use)
I'll update the project with schematics once I have a working first version :)




 Rainer
Rainer
 jurc192
jurc192
 Mike
Mike