Nasser
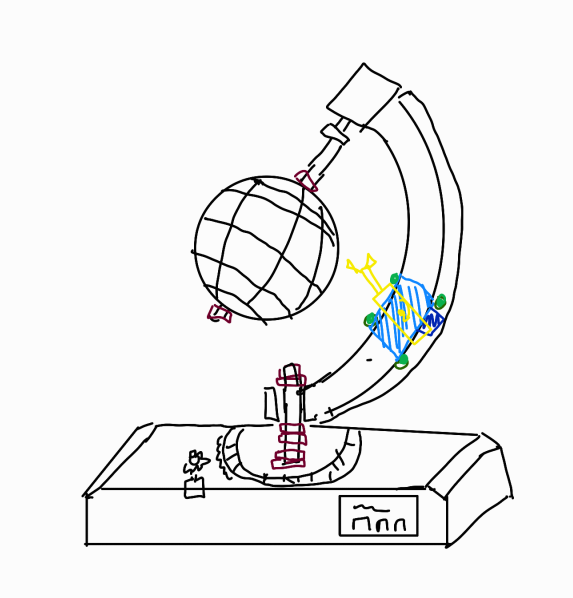
NasserThe goal of this project is to create a spherical chessboard where moves are played by a small robotic arm moving along a circular track.
The robotic arm will execute the moves made by players in an online chess game.
Our broader vision is to build multiple chessboards across different campuses of our school, allowing players to compete remotely. Each robotic arm will replicate the moves made by players in real-time on their respective boards.



 3drobert
3drobert

 Jonas
Jonas