I made several changes to the original Sawppy. I use Versions in OnShape, so just navigate to the "Versions and History" tab to see the different varients.
- Bracket/Coupler for LX-224 servos
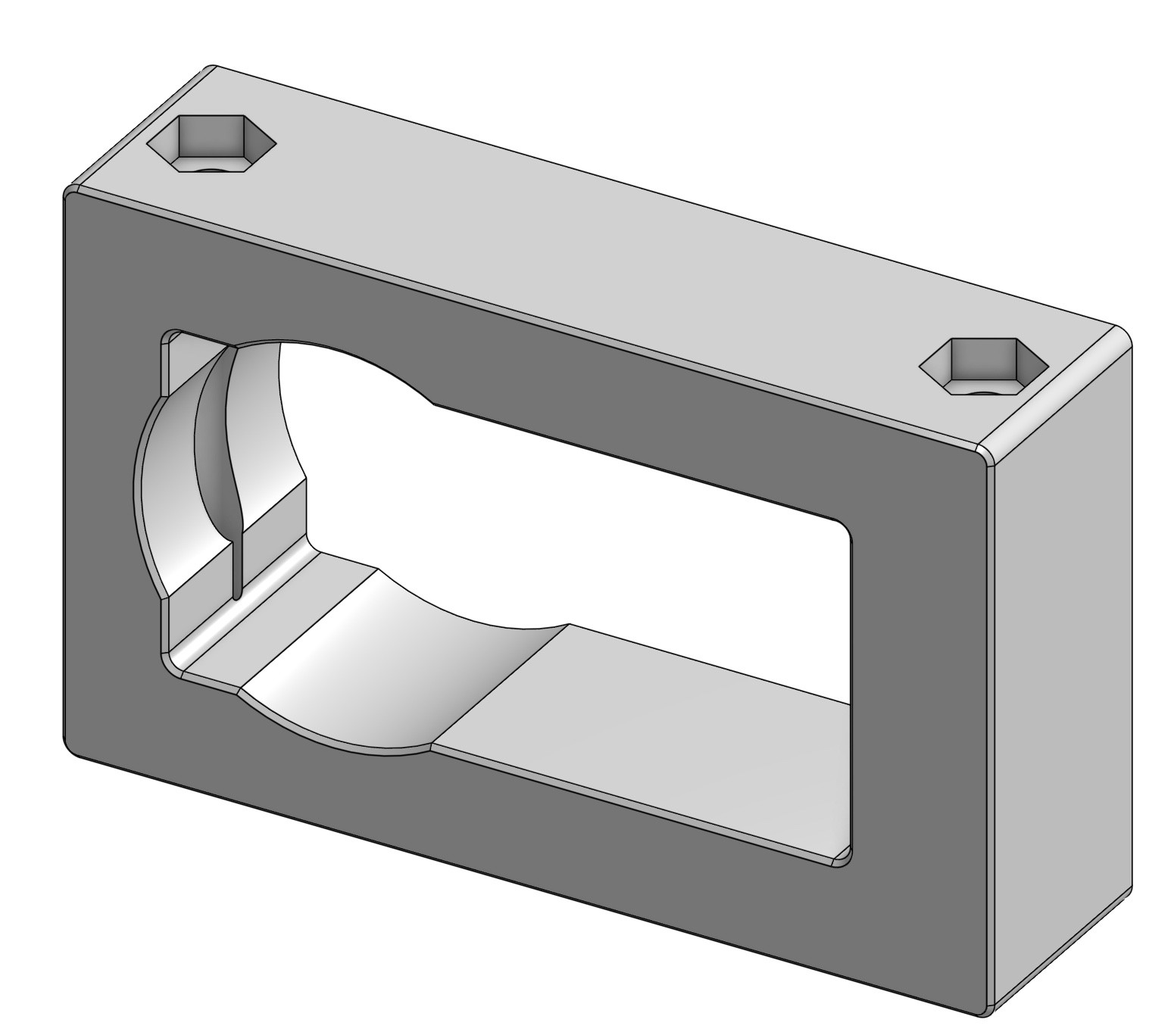
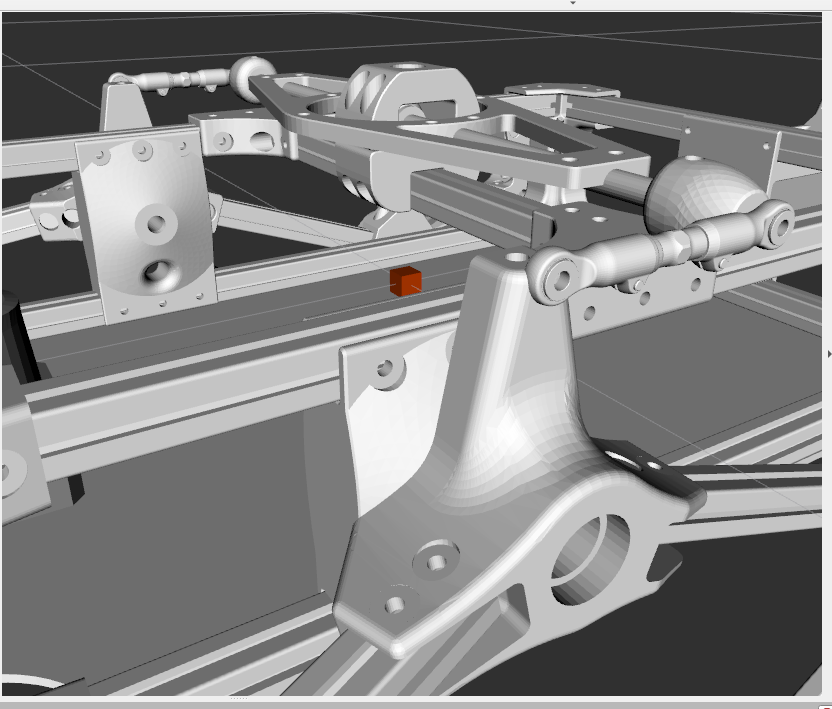
When I ordered parts, the LX-16A wasn't available, so I grabbed the LX-224. As shown in this CAD, the dimensions are slightly different. - Modification of steering knuckle to accept M3 nuts and M3x16 screws for setscrews instead of threading into heatset inserts
As was mentioned in the Discussion section of CJ - a sawppy variant right here on Hackaday, some of us have had issues with heat-set inserts pulling out. As shown in this CAD and the pictures below, I ended up printing a Nut Carriage to get good strength and print resolution in the XY direction, then printing the knuckle in the standard orientation, so that the M3 nut won't spin when tightened against the flat in the 8mm shaft. Then, I used an M3x16 screw as a setscrew instead of the tiny ones called out in the original. We'll see how this holds up over time!
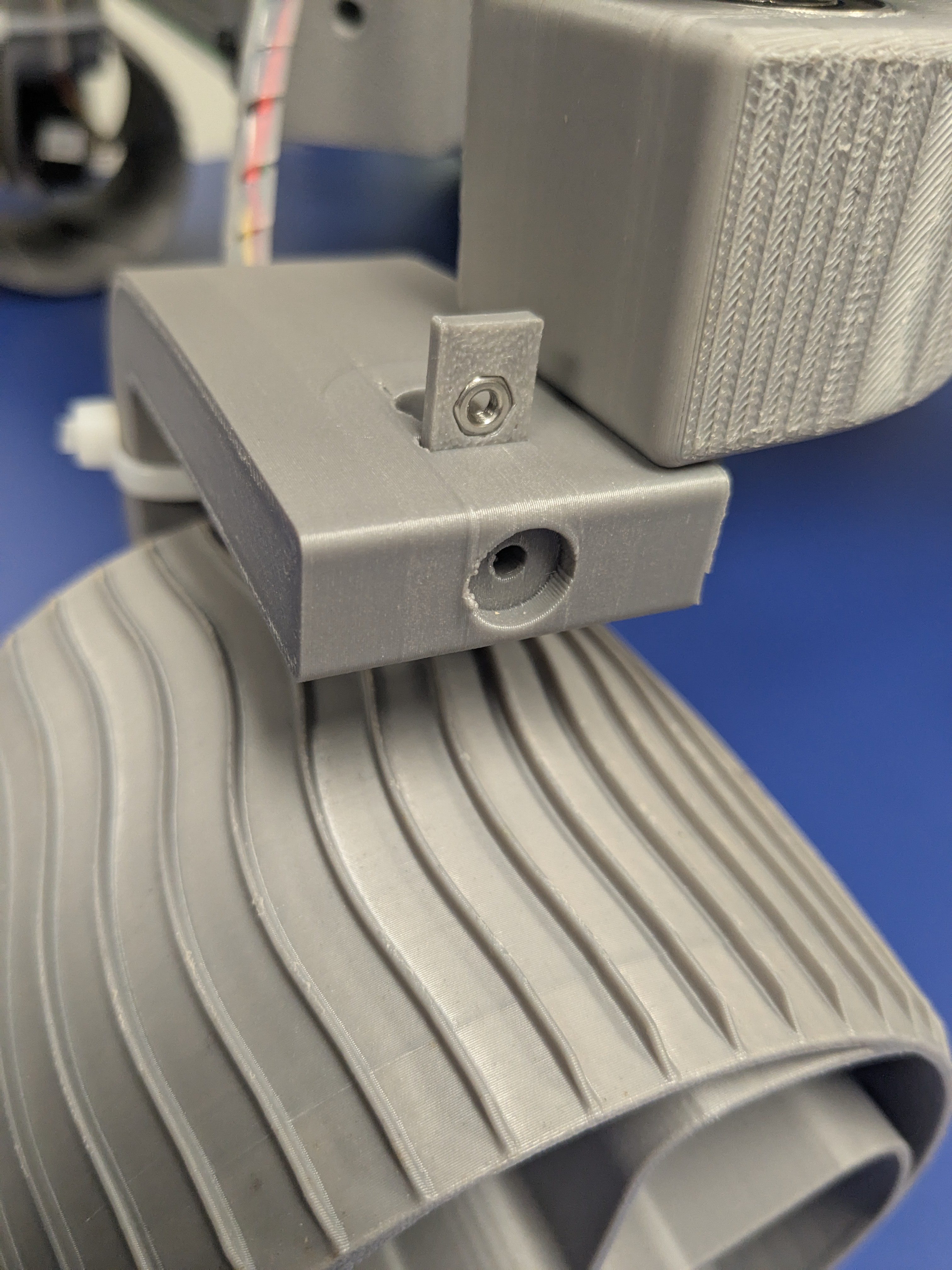
- Modification of bracket to accept M3 nuts and M3x40 screws to hold bracket instead of threading into the Corners
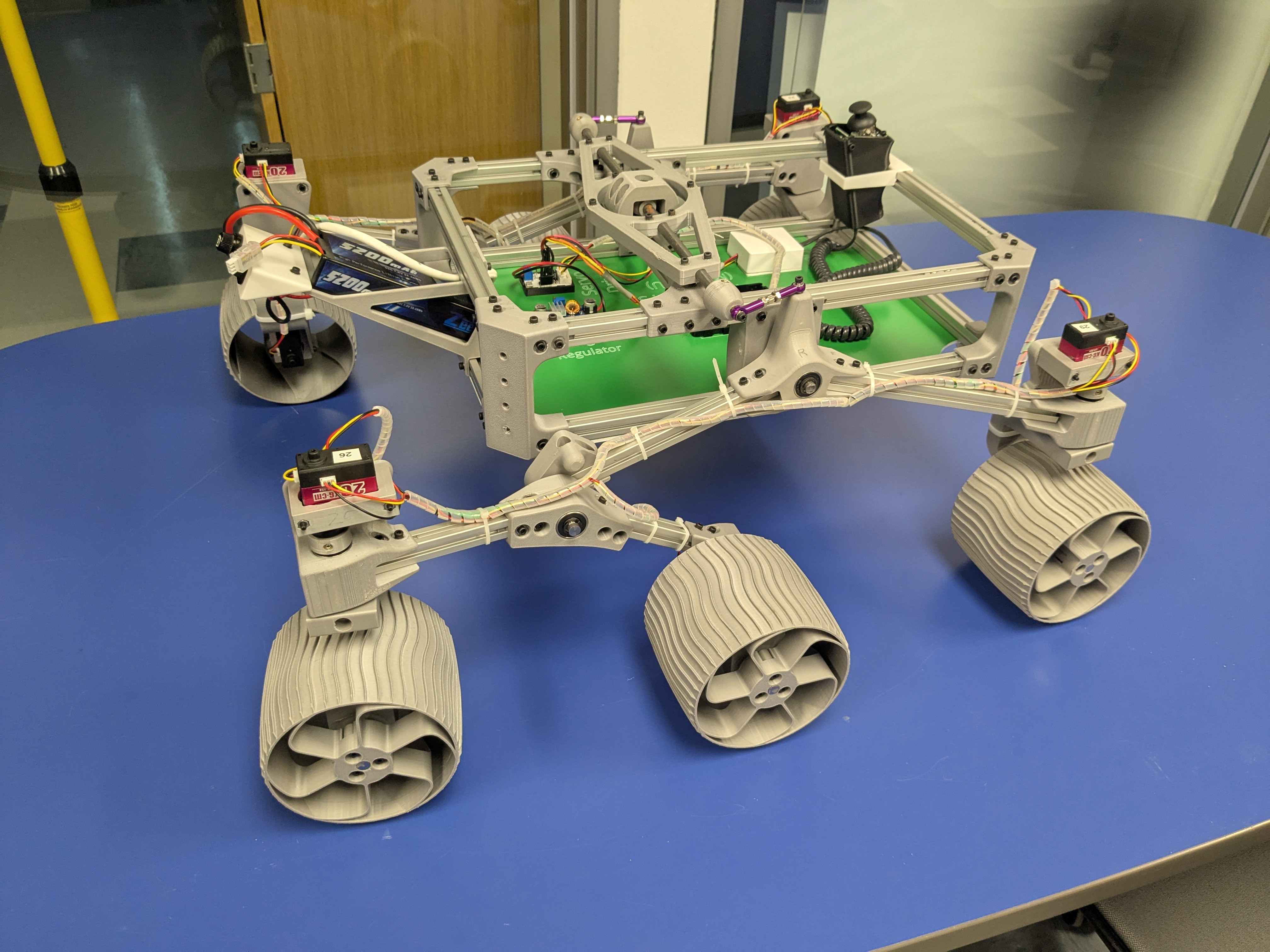
Similarly, I didn't like the idea of attaching my steering servos with the heat-set inserts, so I added some nut capture into my LX-224 brackets so that I could attach them with M3x40mm screws. I did have to move the mounting holes on the Fixed and Steering Knuckles out a bit to allow clearance for the screws around the servo body.![]()
- Additions to the Body panel for laser engraving the electronics layout / laser cutting the mounting holes [probably not terribly useful to anyone but me]
I wanted outlines and labels on my body panel, so I add them here.
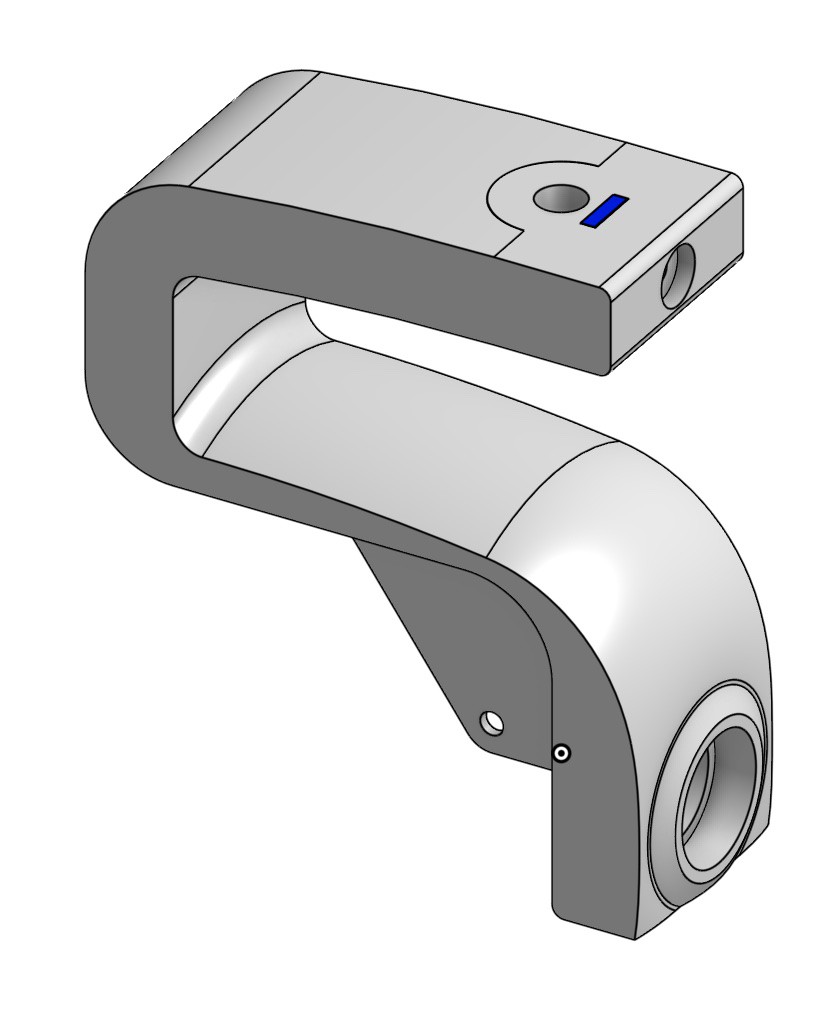
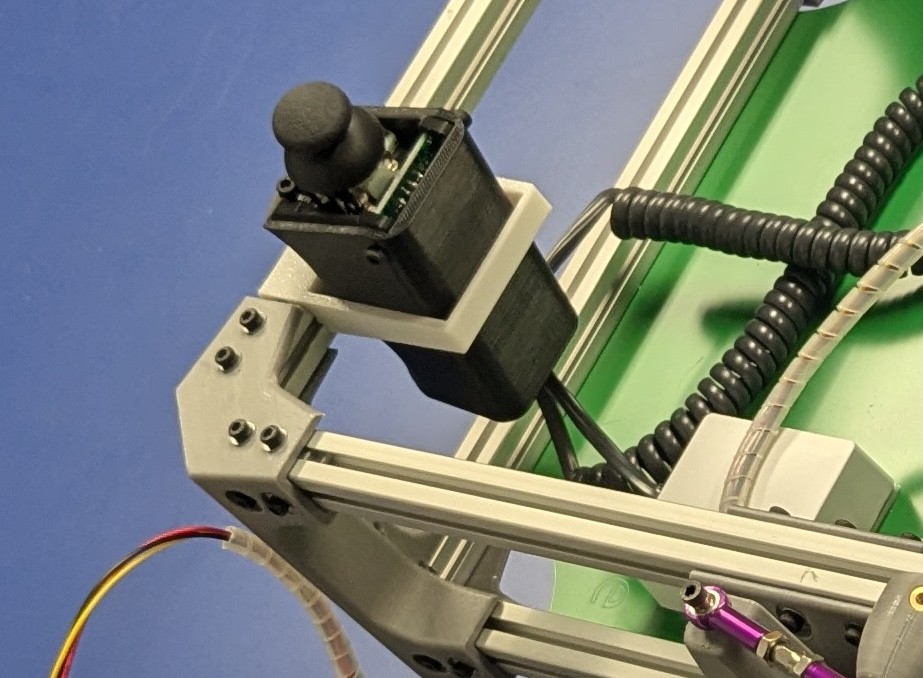
And for the backup controller (as documented here) (CAD - Handheld Arduino Joystick - Copy)
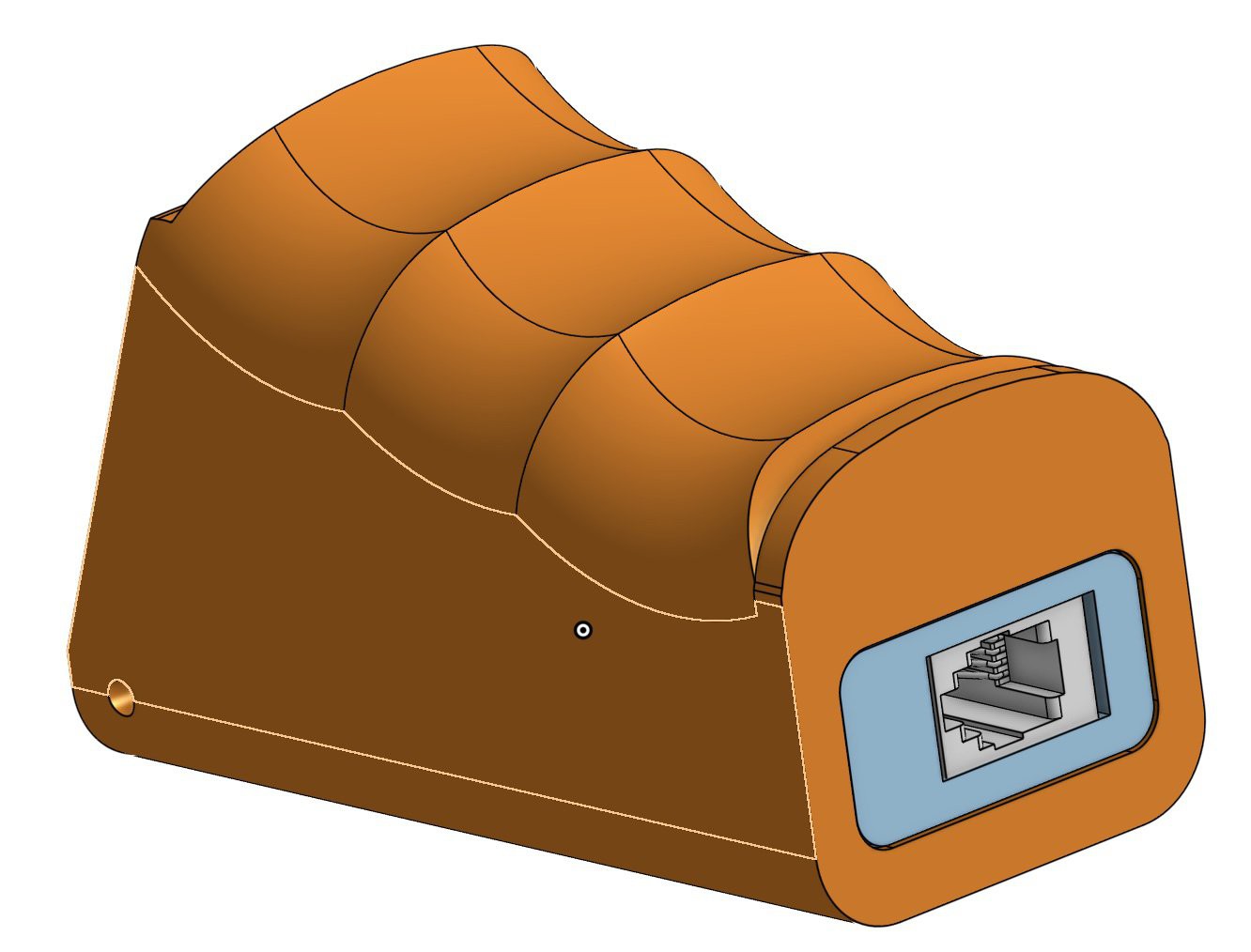
- Modified the Handheld Arduino Joystick controller to accept an RJ9 so that I can connect my controller to my rover with a standard coiled phone cord.
![]()
![]()
- Added a "holster" to place the Handheld Arduino Joystick controller in the box when not in use.
![]()



 Tobias
Tobias
 Andy Piper
Andy Piper
 Chris
Chris
 Morning.Star
Morning.Star
Nice !