 sad_ken
sad_ken
//Rangefinder Arduino code
//Ultrasonic Rangefinder
#include <PWMServo.h>
#include <NewPing.h>
PWMServo servo1;
unsigned int duration;
long timer;
#define svomin 10
#define svomax 150
#define svodormant 80
#define lmotor 1
#define rmotor 2
#define mStop 0
#define mForward 1
#define mReverse 2
#define mLeft 3
#define mRight 4
#define lmotorf 3
#define lmotorr 2
#define rmotorf 5
#define rmotorr 4
#define trigPin 14
#define echoPin 15
#define button1 16
#define avoid 17
#define maxdistance 100
long runTime = 0;
int robotState = mStop;
int mbm = 52;
int svo = svomin;
int count = svomax - svomin;
float distance[180];
int buttonState;
int lastButtonState = LOW;
int scanState = false;
int avoidState;
int lastAvoidState = LOW;
long lastDebounceTime = 0;
long debounceDelay = 50;
NewPing sonar(trigPin, echoPin, maxdistance);
void setup() {
servo1.attach(SERVO_PIN_A);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(button1, INPUT);
pinMode(avoid, INPUT);
pinMode(lmotorf, OUTPUT);
pinMode(lmotorr, OUTPUT);
pinMode(rmotorf, OUTPUT);
pinMode(rmotorr, OUTPUT);
Serial.begin(57600);
//Serial.print("AT+BAUD7");
svo = svodormant;
servo1.write(svo);
delay(1000);
timer = millis() + mbm;
scanState = false;
}
void loop() {
int reading = digitalRead(button1);
avoidState = digitalRead(avoid);
if (scanState == true) {
robotStop();
}
if (avoidState == LOW && scanState == false && robotState == mForward) {
scanState = true;
svo = svomin;
servo1.write(svo);
}
if (reading != lastButtonState) {
lastDebounceTime = millis();
}
if((millis() - lastDebounceTime) > debounceDelay) {
if(reading != buttonState) {
buttonState = reading;
if(buttonState == HIGH) {
scanState = true;
svo = svomin;
servo1.write(svo);
}
}
}
lastButtonState = reading;
if(timer < millis() && scanState==true) {
getDist2();
svo++;
if(svo > svomax) {
svo=svodormant;
smooth();
smooth();
Serial.println("");
Serial.println("BEGIN");
for(int i=0;i<=count;i++) {
Serial.print("S");
Serial.println(i+10,DEC);
Serial.print("V");
Serial.println(distance[i], DEC);
}
scanState = false;
robotThink();
}
servo1.write(svo);
if(svo==svomin) { delay(1000); }
timer = millis() + mbm;
}
if (runTime < millis()) {
motor(lmotor, mStop);
motor(rmotor, mStop);
robotThink();
}
}
void getDist2() {
duration = sonar.ping();
distance[svo-svomin] = duration/US_ROUNDTRIP_CM;
if(duration==0) { distance[svo-svomin] = maxdistance; }
}
void smooth() {
int p;
float temp;
float mean;
for(int i=0;i<=count;i++) {
mean=0;
for(int t=-4;t<=4;t++) {
p=i+t;
if(p>count) {
p=p-(count+1);
}
if(p<0) {
p=p+(count+1);
}
mean = mean + distance[p];
}
mean = mean / 9;
distance[i] = mean;
}
}
void motor(int m, int d) {
int mf;
int mr;
switch (m) {
case lmotor:
mf = lmotorf;
mr = lmotorr;
break;
case rmotor:
mf = rmotorf;
mr = rmotorr;
break;
default:
mf = 0;
mr = 0;
}
switch (d) {
case mStop:
digitalWrite(mf, LOW);
digitalWrite(mr, LOW);
break;
case mForward:
digitalWrite(mf, HIGH);
digitalWrite(mr, LOW);
break;
case mReverse:
digitalWrite(mf, LOW);
digitalWrite(mr, HIGH);
break;
default:
digitalWrite(mf, LOW);
digitalWrite(mr, LOW);
}
}
void robotStop() {
motor(lmotor, mStop);
motor(rmotor, mStop);
runTime = 1000;
robotState = mStop;
}
void robotForward() {
motor(lmotor, mForward);
motor(rmotor, mForward);
runTime = 1000;
robotState = mForward;
}
void robotReverse() {
motor(lmotor, mReverse);
motor(rmotor, mReverse);
runTime = 1000;
robotState = mReverse;
}
void robotLeft() {
motor(lmotor, mReverse);
motor(rmotor, mForward);
runTime = 1000;
robotState = mLeft;
}
void robotRight() {
motor(lmotor, mForward);
motor(rmotor, mReverse);
runTime = 1000;
robotState = mRight;
}
void robotThink() {
if (avoidState == HIGH && scanState == false) {
robotForward();
}
if (avoidState == LOW && scanState == false) {
robotRight();
}
if (avoidState == LOW && scanState...
Read more »
0%
0%
Ultrasonic Radar & Robot
Given almost no budget and some salvaged parts, the aim is to try and build a robot hopefully more advanced than simple avoidance.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 GOAT INDUSTRIES
GOAT INDUSTRIES
 tehaxor69
tehaxor69
 Makerfabs
Makerfabs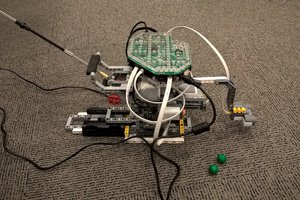
 DamianDurczok
DamianDurczok
Hello dude, are you still working on this project? 'Cause i've problem with my project. I'am working on arduino based sonar with stepper motor and hc-sr04 ultrasonic sensor, i wrote the codes on arduino and i am trying to processing radar screen on MatLab but it doesn't work. After 5-10 degree scanning, the scanner bar is missing every time. Can you send me your arduino codes for this project?