 ken.do
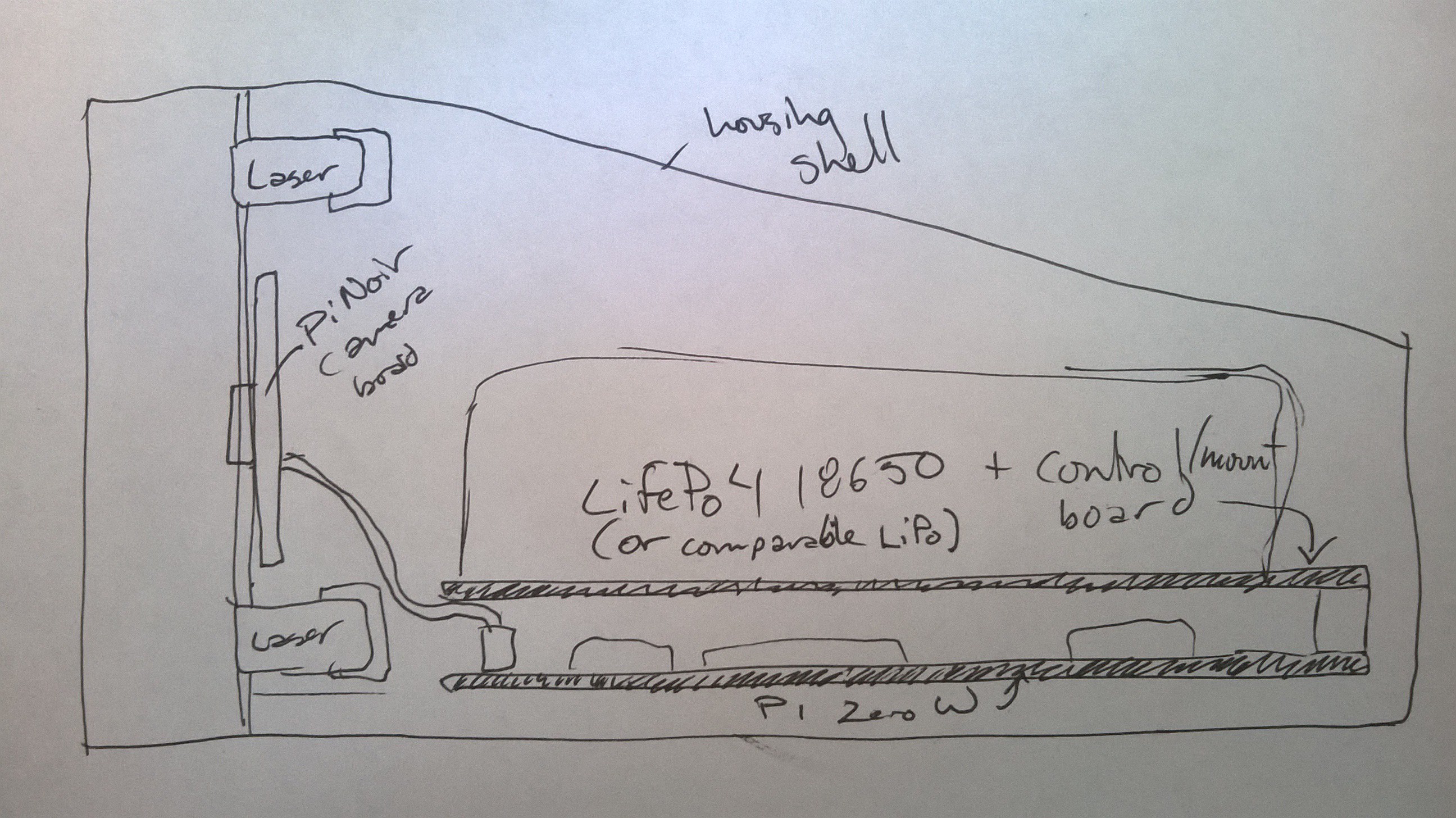
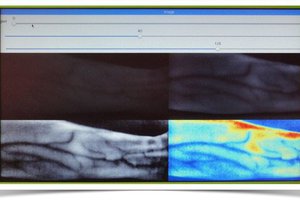
ken.doThe idea behind this project is you have have three lasers pointed in the same direction. If at least two of the laser dots fall on an object, the distance between the dots is measured in pixels. This measurement is used to create a 'distance to object' value.
If this 'distance to object' value is below a threshold (set by software and adjustable by a manual potentiometer) then the image is zoomed in or out by means of resampling a specific area of the image, or gathering another wider view image until the value falls within the threshold range.
This project can be applied as a higher precision rangefinder, ensuring that the target is continuously tracked and if the target goes behind another nearer object, a larger field of view is available for target re-aquisition)
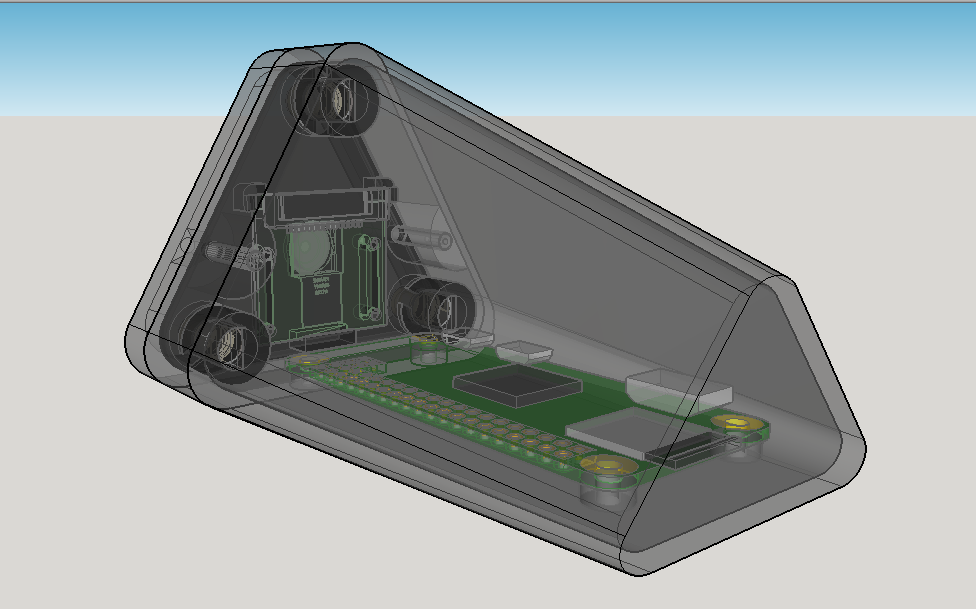
There are lots of image analysis and display options out there. Some of the options I have been considering include using a Raspberry Pi 3 connected to Zero via WiFi + a 5" LCD, or using a small Android tablet/smartphone with the Pi Zero W as an Android 'Thing'.




 Myrijam
Myrijam
 TheThirdMan
TheThirdMan
 Markus Dieterle
Markus Dieterle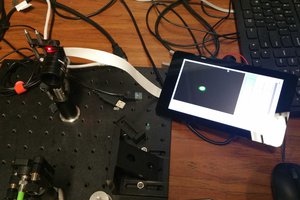
 Anthony Ransford
Anthony Ransford
What would it cost to add a small OLCD screen, and perhaps a very very small numerical readout to the back for target acquisition and ranging? I'd just need the internals, and probably another battery added so I can streamline it and make it easy to strap to my rifle or spotting scope.
What do you think the max range on this is? I'm still reading up, so if you've mentioned it, I haven't gotten there yet. You make something like this that can hit 500, 750, or 1000 yards and there's huge potential. Heck, I'd be happy with 300 for version 1.