Hexastorm
Hexastorm-
Hardware Update 2024
11/07/2024 at 14:55 • 0 commentsUpdate of the hardware of 2024 using AI voice. I plan to test it in December.
-
Render of the polygon mirror motor
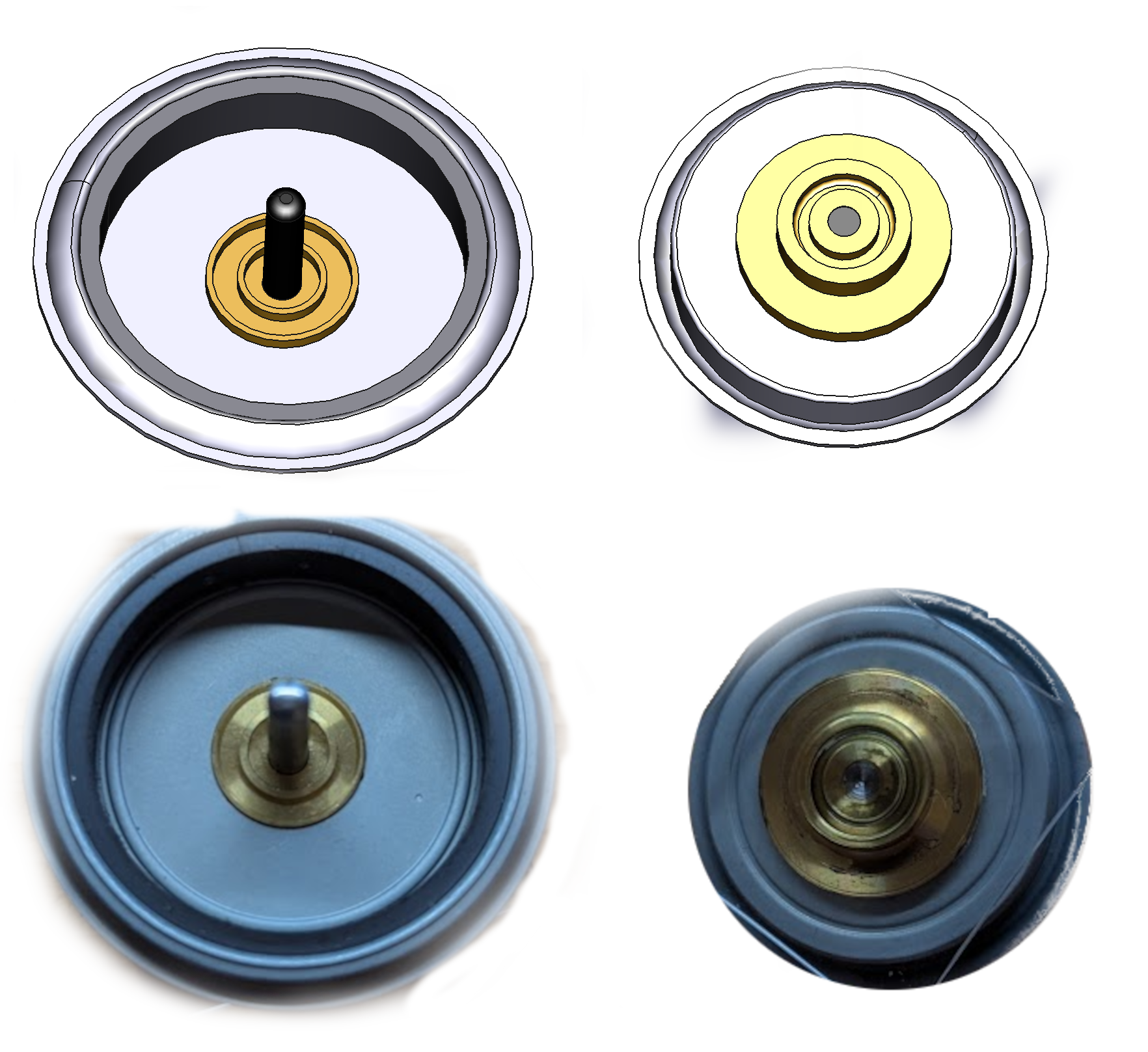
09/06/2024 at 10:02 • 0 commentsThe laser head, version 0.1, is compatible with a brushless motor. While the PCB motor is also supported, it won't be the default configuration. To accurately visualize the mirror motor, a more detailed render was necessary. The NBC3111 mirror motor and a cad model in freecad is depicted below. Below a head is shown which supports the prism or mirror which is spinning.
![]()
![]()
-
Design Cycle Update: Extension module
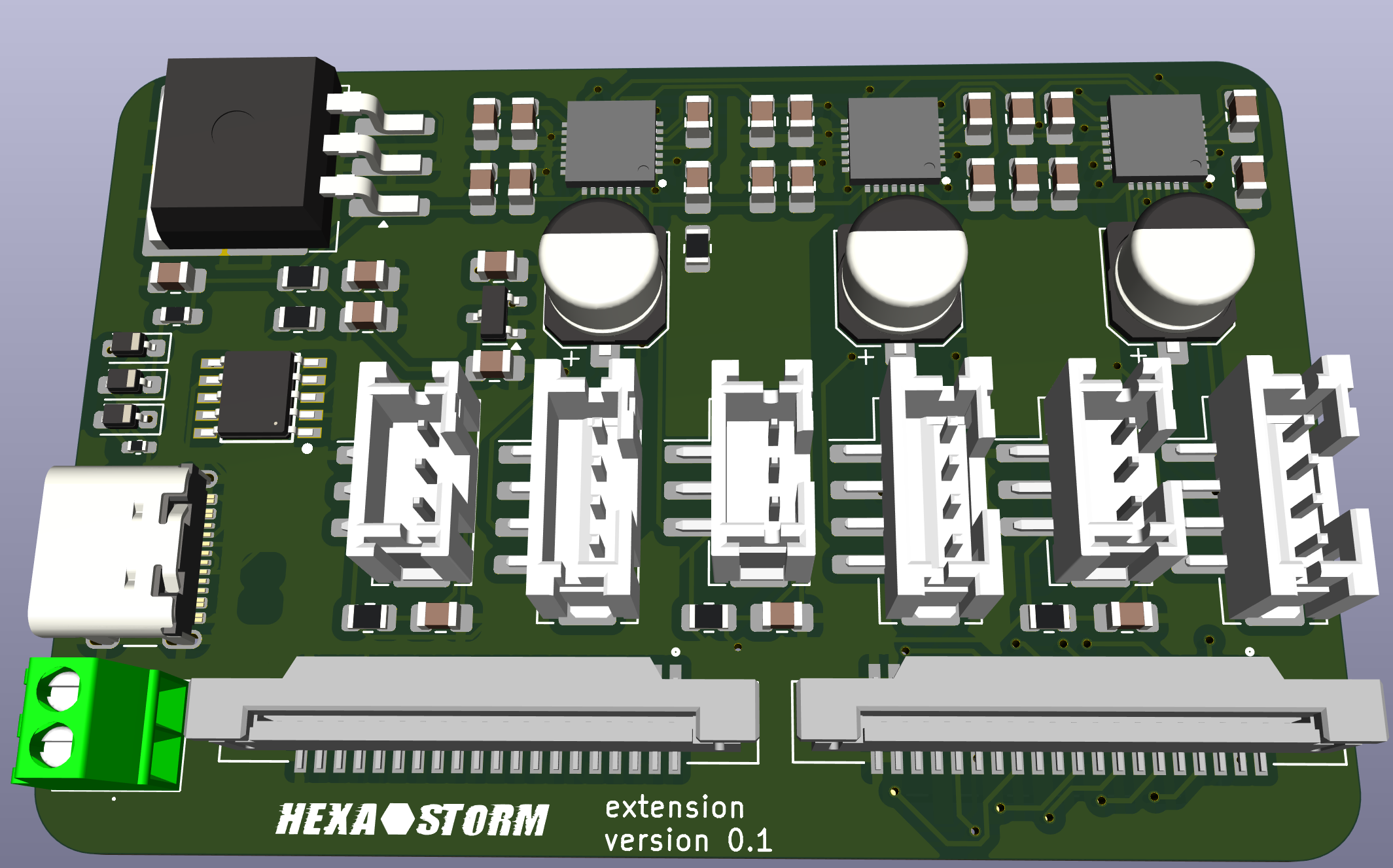
08/16/2024 at 17:31 • 3 commentsThe extension module is mounted on top of a compute module. The female 20 pin header is not shown. Power is supplied via a USB-C connection requiring a 12V charger. An on-board converter (large black chip) reduces this to 5V for the compute board.
The board has three stepper drivers TMC2208 and three end stops. A 20-pin connector interfaces with the laser head. Another 20 pin connector is free to use. The laserhead needs to move less than a FFF printer due to the polygon, as such not a lot of current for the stepper motors is required. It is assumed this is less than 1 Amp.
Note: A USB-C connection with an FPGA for the laser head was initially considered but is currently postponed.
-
Design Cycle Update: Compute Module
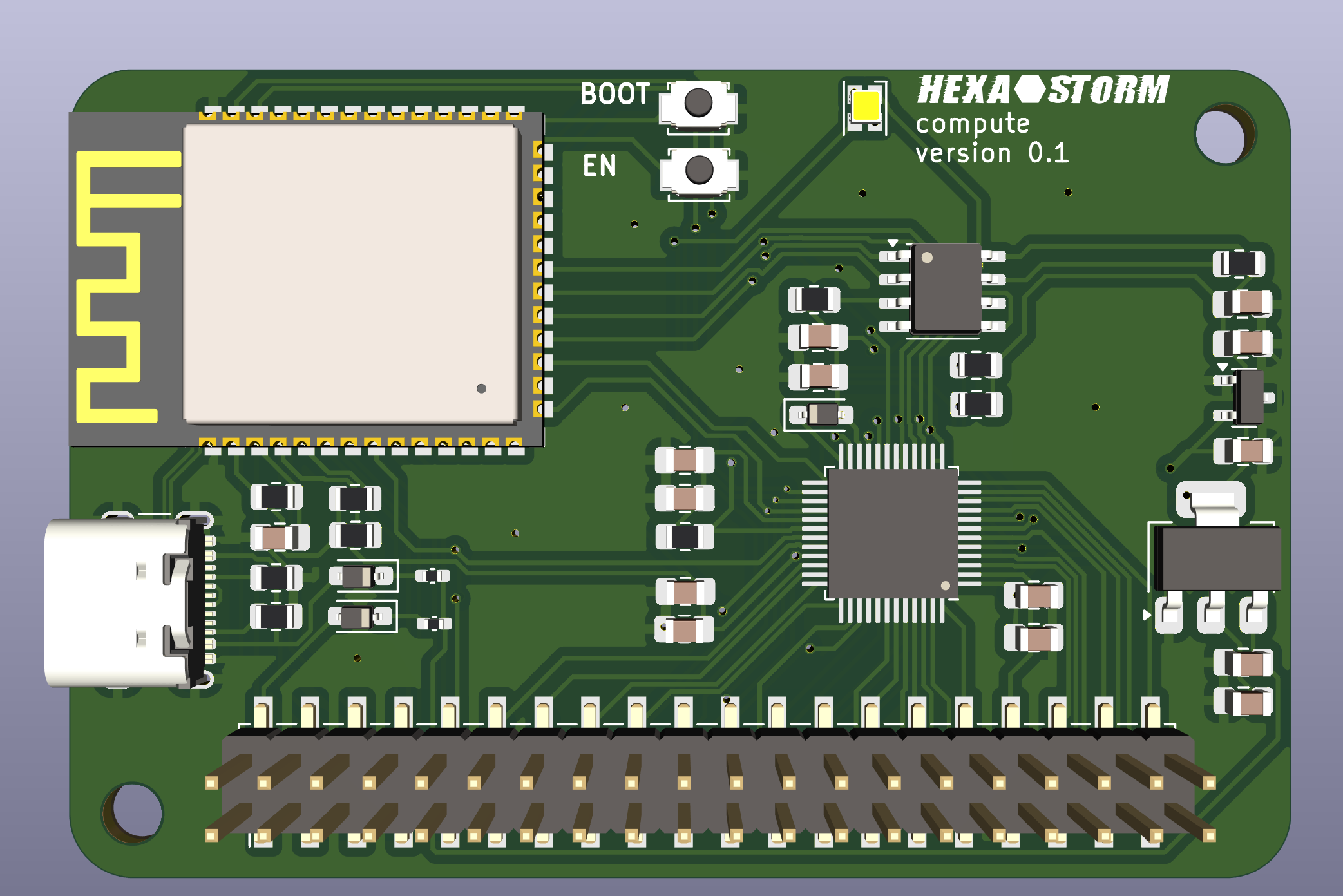
08/04/2024 at 10:16 • 0 commentsI have initiated the next design cycle. The core component is the compute module, housing an ESP32 microcontroller and a UP5K FPGA. It's equipped with a reset/boot switch and a single control LEDs for the ESP32 and FPGA. A small memory module dedicated to storing the FPGA bootloader is also integrated. The ICE V module loads the FPGA directly from the ESP32. I keep it , as I might want to use this memory as a buffer for storing instructions to the laserhead. Board is 2 layer with mostly SMT components to keep costs low.
NOTE: LilyGO T-FPGA ESP32-S3 is an interesting alternative but it is not fully supported by https://github.com/YosysHQ/apicula
-
Microdot webserver for laser scanner
06/21/2024 at 14:11 • 0 commentsI did not post in quite some time. Luckily software part is now largely finished. You can test some of the code locally in cpython.
The webserver is quite different from Octoprint, see FLOSS weekly episode 778. I use Micropython instead of Python, furthermore I rely on microdot and not Flask.
Taken together, I need much less resources which greatly reducing costs and deployment complexity. -
rod based 3d printing with laser prism scanner
05/04/2024 at 23:04 • 0 comments![]()
From fabbaloo, a new research paper proposes an unusual 3D printing process that uses a rod instead of a flat print plate.
It would make a lot of sense to remove the slit and the beamer. I would use a laser prism scanner instead. The laser prism scanner can do 20k rpm x 8 lines. It would never need to stop..
I will get back to this
-
License changes
04/02/2024 at 16:03 • 0 commentsI changed the license of the software and hardware in the project. Code and hardware remain open source but cannot be used commercially unless you have a license. You are also not allowed to make clones.
I am willing to split of parts of the code base under more permissive licenses if this leads to collaboration.Synopsis License Terms
CC BY-NC-SA 4.0 Deed, you may not use the material for commercial purposes see https://creativecommons.org/licenses/by-nc-sa/4.0/deed.en for a summary
Motivation
Licensing the whole project as GPLv3 limits my ability to optimize my legal strategy with relation to other rational agents. I foresee competitive pressure from Asia, given the weak European industrial base and high labor prices.
Furthermore, I foresee increased competitive pressure and interest from the Netherlands. This has been increasing its investment in the sector of laser direct imaging. The Netherlands is strongly against open source.
If you now make changes, I have several options; acquire a license from you, split of part of the work under a more permissive license which allows us to collaborate commercially or write my own code which achieves the same in another way. -
Main board design
02/16/2024 at 10:31 • 0 commentsI envision the development kit consists out of two components; a laser head and a main board.
This post sheds more light on the main board.
The main board can be programmed and powered via USB C. These are two "regular" USB 2 connectors. The CH224K chip is used to request 12V from the power source. The main board uses a ESP32 S3 and connects to the laser head via USB C 3.1.
This is not a regular USB C connector. In an ideal world, you could connect to the laser head with USB C using your laptop.
I am working towards this, and therefore I am starting to support USB C 3.1. I will share more details on this in the future.
The main board features three stepper drivers, to move the laser head. Angled pin headers are used to connect to the end stops and stepper motors. A micro SD card reader is present for additional storage. The ESP32 S3 already provides 32 MB storage, so this should not be needed. The black box is AK-NW-84 (100x67x22m) and can be found online.![]()
-
Laser Direct Imaging using a PCB motor
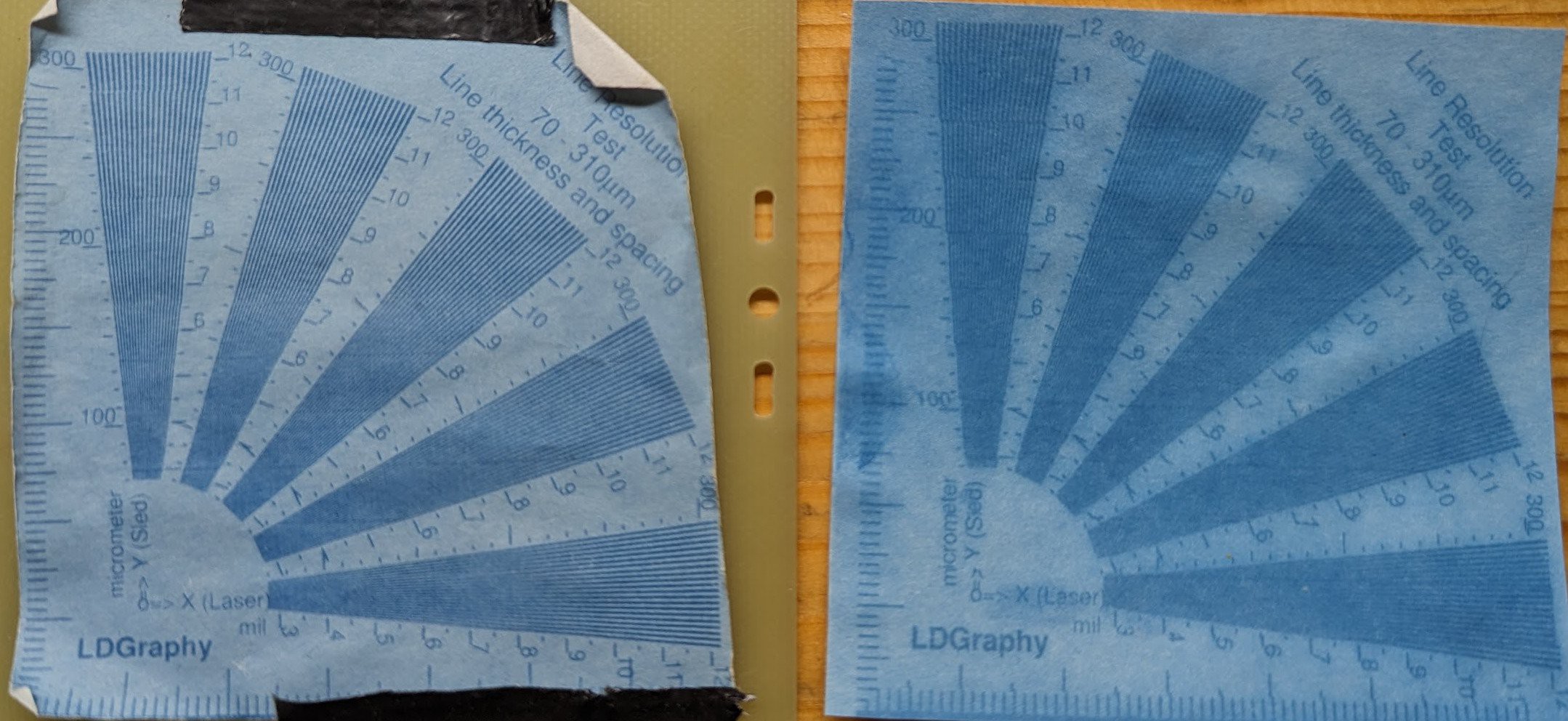
01/08/2024 at 15:50 • 2 commentsFinally after all these years a laser direct image using a prism and PCB motor.
PCB motors have come a long way on Hackaday!
On the left you see an exposure with Ricoh polygon mirror motor and on the right you see the exposure with the PCB motor.
Both use prisms.
The quality of the PCB motor exposure is less, still you can see the concept is working.
I believe this is not due to the quality of the substrate but because I look for the diode between a period fraction of 0.999 and 1.001 for the ricoh motor and between 0.900 and 1.100 for the pcb motor. As such, there is much more back light for the PCB motor. This is explains the blue hue.![]()
@gravis
I ran into a small issue where my stepper motors overheated. As such, I could not expose large areas.
After reducing the current to my stepper motor the setup started working.
I can now expose larger areas, the area is 65 mm by 65 mm. The area is exposed in 13 sweeps and one sweep is around 10K lines. I do half a step per lane. The material is quite old, had it for years and needs a lot of light.
Possibly the chemistry is not as good as it was. -
A promising start of 2024
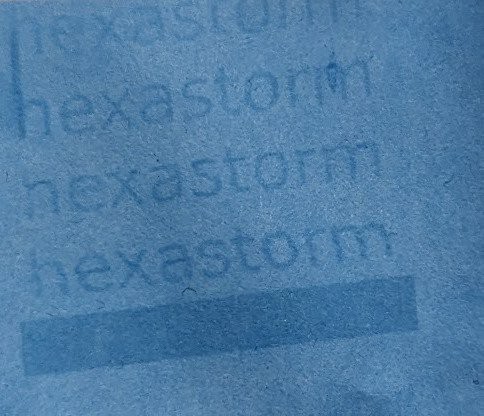
01/03/2024 at 15:45 • 2 commentsGood start of 2024; I made the world's first laser direct image using a prism and a PCB motor ...
Lo and behold for the first result !
Video with more details will follow
![]()