 Sergei V. Bogdanov
Sergei V. BogdanovWe assemble the model and try to start the walking using powerbank.
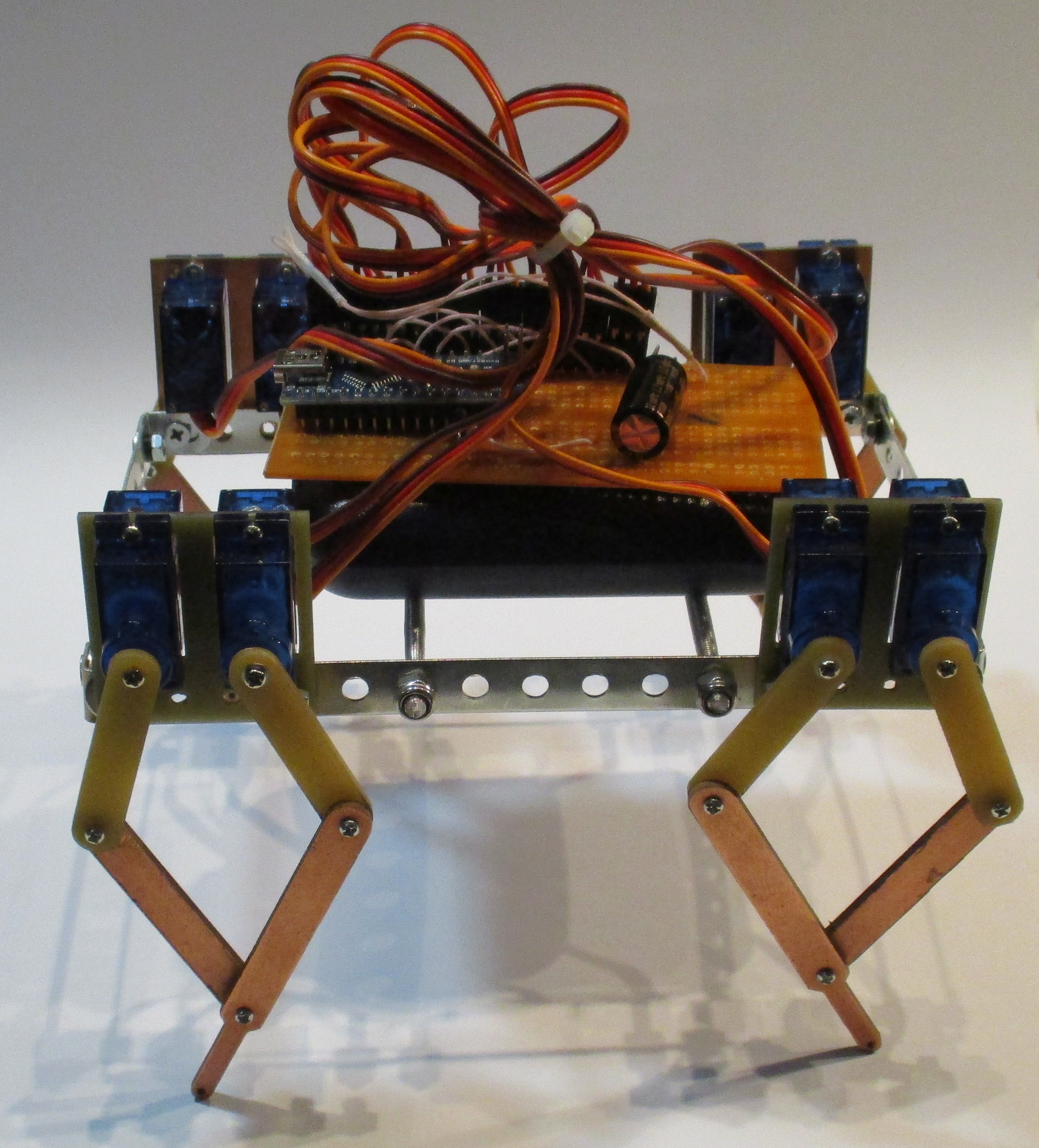
It can walk, but it walk with a limp now. We are to calculate more precise algorythm of leg changing to avoid a limp.
A project log for RoboAmbler Walking Base
RoboAmbler is simpe open source stepping quadruped Robot walking base with 5-bar linkages
We assemble the model and try to start the walking using powerbank.
It can walk, but it walk with a limp now. We are to calculate more precise algorythm of leg changing to avoid a limp.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
We make some corrected version of code. It can walk now.
https://youtu.be/-PBh-VfGNQc
Are you sure? yes | no
Hmm, is it statically stable? Can you stop it with one of the legs up, without falling down? I think that if you made the legs longer or the body narrower, you could get a greater effect from tilting the whole body, and thus better stability.
Are you sure? yes | no
You are right, of course. Tilting of the body is energy loss. The Robot is stable almost on all the cycle. The Stop, Go and Turn (left, right) are the next modes we designe.
Are you sure? yes | no
Thank You. It is nice idea.
Are you sure? yes | no
From my experiments with #Katka I can tell you that it helps when you tilt the body to the opposite side of the leg you are going to lift before lifting it, by making the legs on that side shorter.
Are you sure? yes | no