davedarko
davedarko-
Getting started with the pocketbeagle
09/28/2017 at 22:31 • 3 commentshttps://github.com/beagleboard/pocketbeagle/wiki/FAQ
https://github.com/beagleboard/pocketbeagle/wiki
https://beagleboard.org/pocket
https://octavosystems.com/2017/09/21/pocketbeagle-launch/
http://www.mouser.de/new/beagleboardorg/pocketbeagle/
Sadly 4 PWM pins aren't enough to get all 8-10 servos running, so I need a controller for that anyway, probably keep the arduino for that. Probably don't even need PWM for the servos though. (probably leeds to PCA9685 check #Servo Breakout for WeMos D1 Mini )
Totally neat: USB is on the GPIO headers. comparing that to the Raspberry PI derivates, that's pretty cool.
-
shopping in Murica
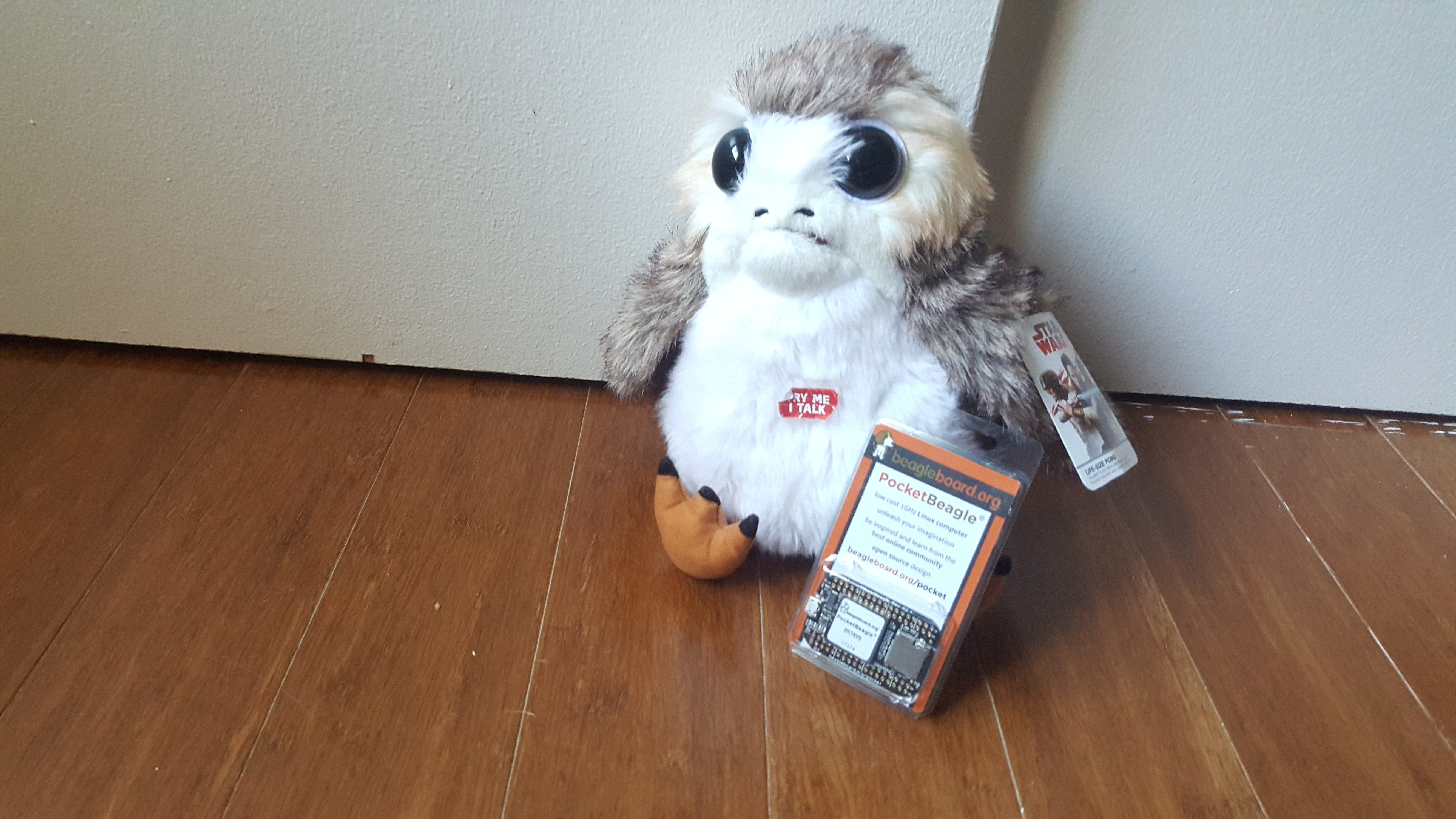
09/27/2017 at 19:34 • 6 commentsI've bought a "target-only" plushy Porg with sound and also got one of the new https://beagleboard.org/pocket - at the Maker Faire New York. So I got the brains and maybe the skin and voice :)
![]()
-
weird head mechanics
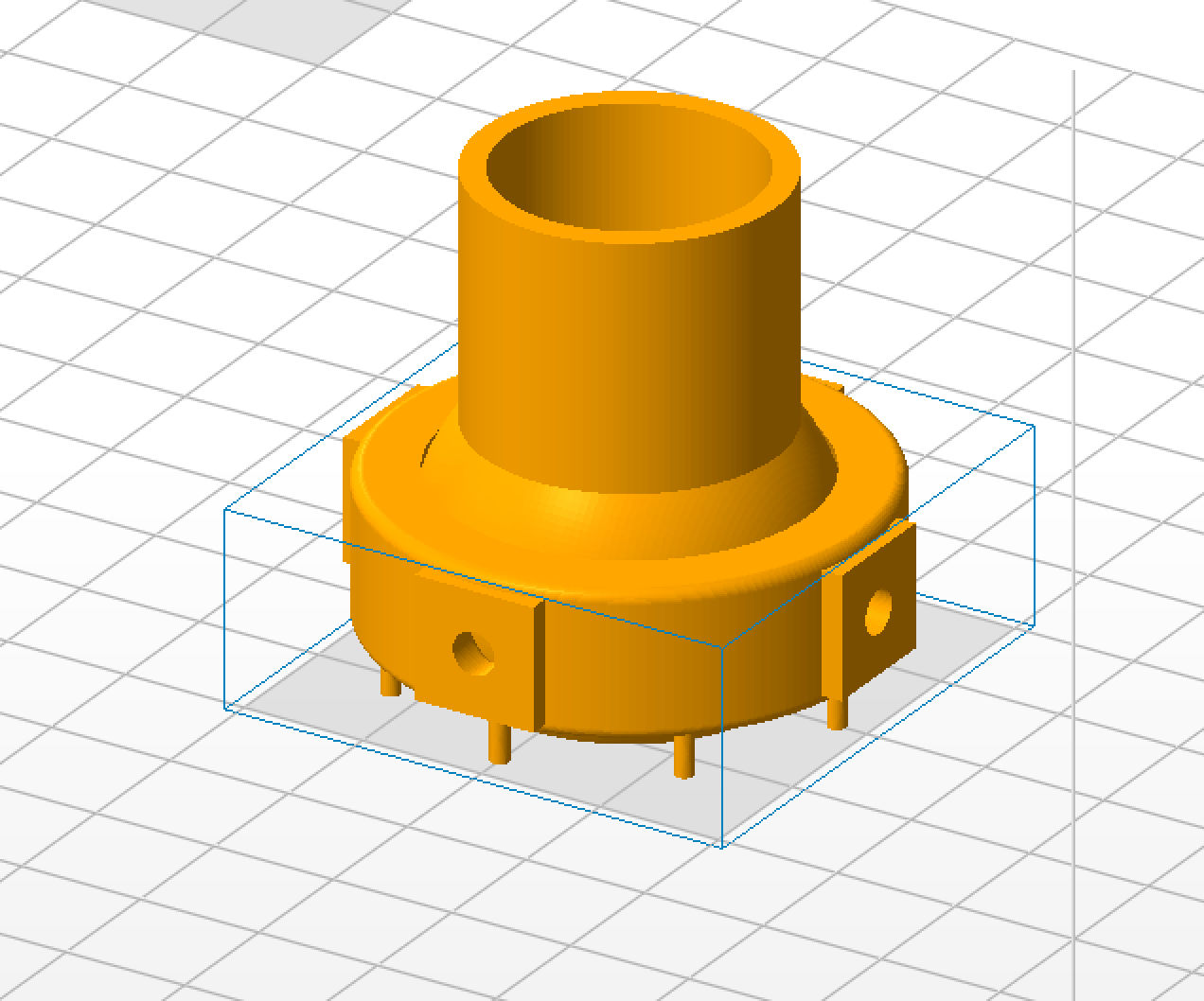
09/16/2017 at 22:20 • 3 commentsI'm trying to replicate the head behaviour of the "my keepon", as seen here [https://hackaday.com/2009/10/29/keepon-eat-your-heart-out/] and so I try to 3D print something that might work. I can't make out if the servos are connected in a 90 or 180 degree angle, so I've added 4 screw holes. These are two parts, printed into each other with a distance of 0.5mm - let's hope that's enough room.
I googled it further and found out that I basically want a swashplate (that's my google term) - with that I'll get an awesome range for shoulders and head! Just imagine the head with some oled eyes and the shoulders attached to this part and I'm almost done. Well, not really. Not at all. The amount of servos used is 3, so like a delta bot basically. Not sure if the shaft has to be fixed or also on a ball joint.
![]()