-
In operation: what was achieved
10/16/2017 at 19:39 • 0 commentsThe scout competition launched on 16th September in Southern Finland. It was an early morning when 37 trackers were distributed to the teams to be sent to deep forests. It was clear in the beginning that the most will stay in the forest even when it was dark and having to manage on their own.
With the exception.
We as the organizers of the competition had a direct insight to their position. We were able to estimate when they were getting "too" lost and were able to deploy a search-and-rescue team. A few times this was really needed.
We were able to change the way the competition status is monitored. We were able to see when the scout teams arrive to checkpoints and give an early warning to the checkpoint operators to prepare or to disassemble when every team had passed the checkpoint. On top of that, we were able to speed up the rescuing process if a team got lost. Finding a lost team from a 1x2km area in darkness and rain is not an easy task - unless you know the exact position.
The project can change the world. If more events employ live tracking, the events can be safer and much more educative - the team can see afterwards where they have been. The teams can truly learn from their mistakes.
Licensing during the project: most of the software can be licensed under MIT or GPL and on some occassions, GPL applies.
![]()
-
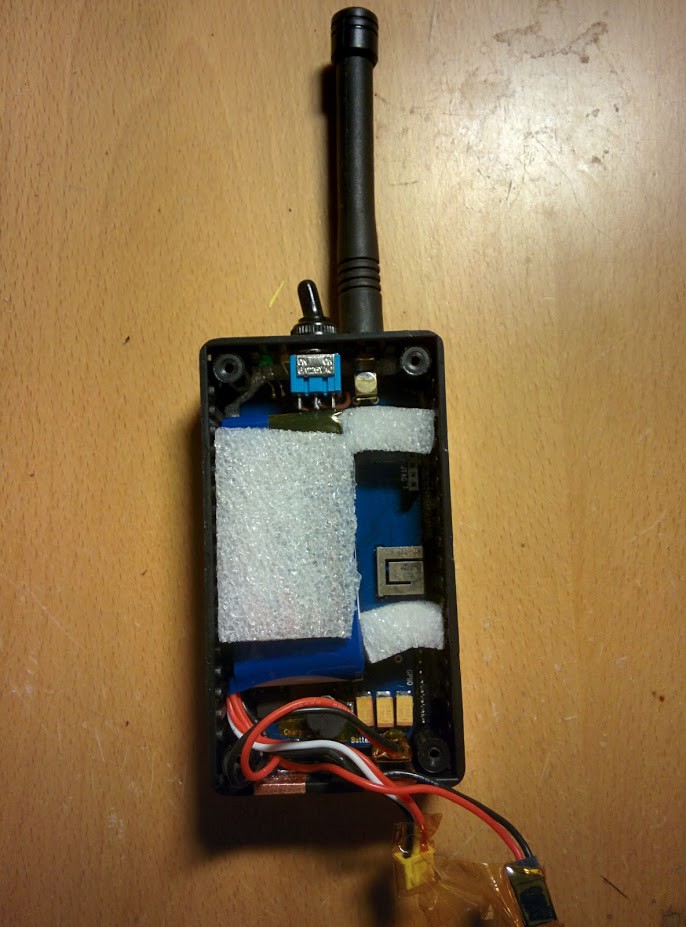
Tracker device
10/16/2017 at 19:31 • 0 commentsThe tracker devices are rougly the size of a handheld radio and can operate on a battery for one day. Their main parts are a GPS receiver, a VHF data transceiver with a microcontroller, a flash memory to store location data and a battery charging circuit.
So far there have been 3 revisions of the tracker design including a very early prototype with a slightly different design. The very first tracker was crafted as a course exercise in Aalto University, School of Electrical Engineering, course Electronics Workshop (Elektroniikkapaja). The first prototype was a success with good-enough performance, based on which the second revision was designed.
The second revision (PB, as we call it) was based on a 32-bit ARM µC compared to the AVR in the PA revision. The radio part was integrated in the µC (EFR32FG1P131F256GM) and therefore the BOM actually decreased from the first revision. However, the PB came with some limitations, such as no power switchs for peripherals, and was surpassed by the production model PC.
The PC revision was designed in great hurry, since the competition was close. The ultimate design was sent for manufacturing in the end of July, only 1,5 months before the competition. The revision was success, however, and we managed to prepare 50 trackers for operations just in time. Literally - the last changes were made only days before the competition.
A fun detail: the tracker is protected by an ammunition pouch with PALS straps intended for military operations. However, the cartridges are now replaced by GPS tracking. The pouches were readily available at reasonable prices and were surplus.
![]()
![]()
-
Web service for tracking
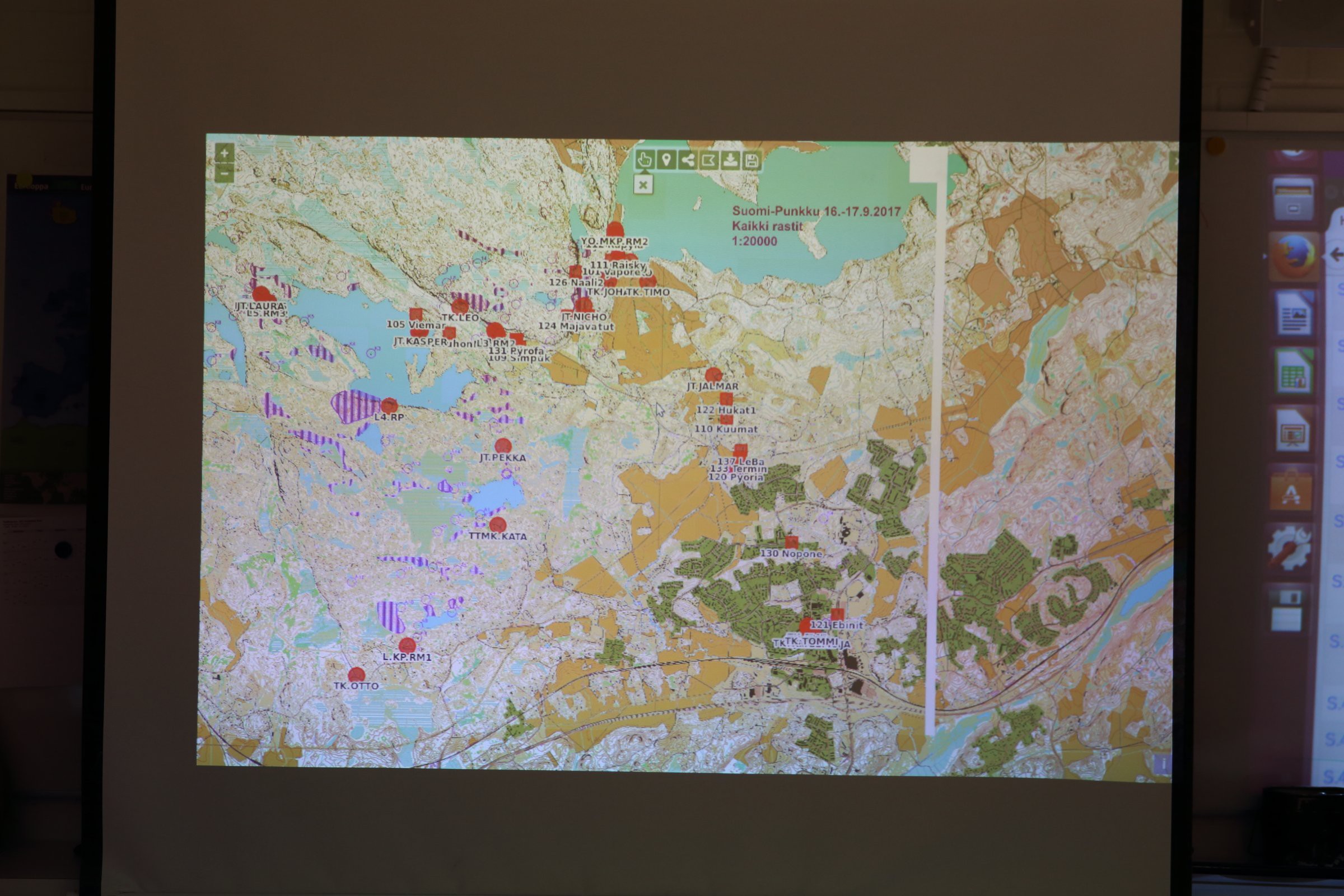
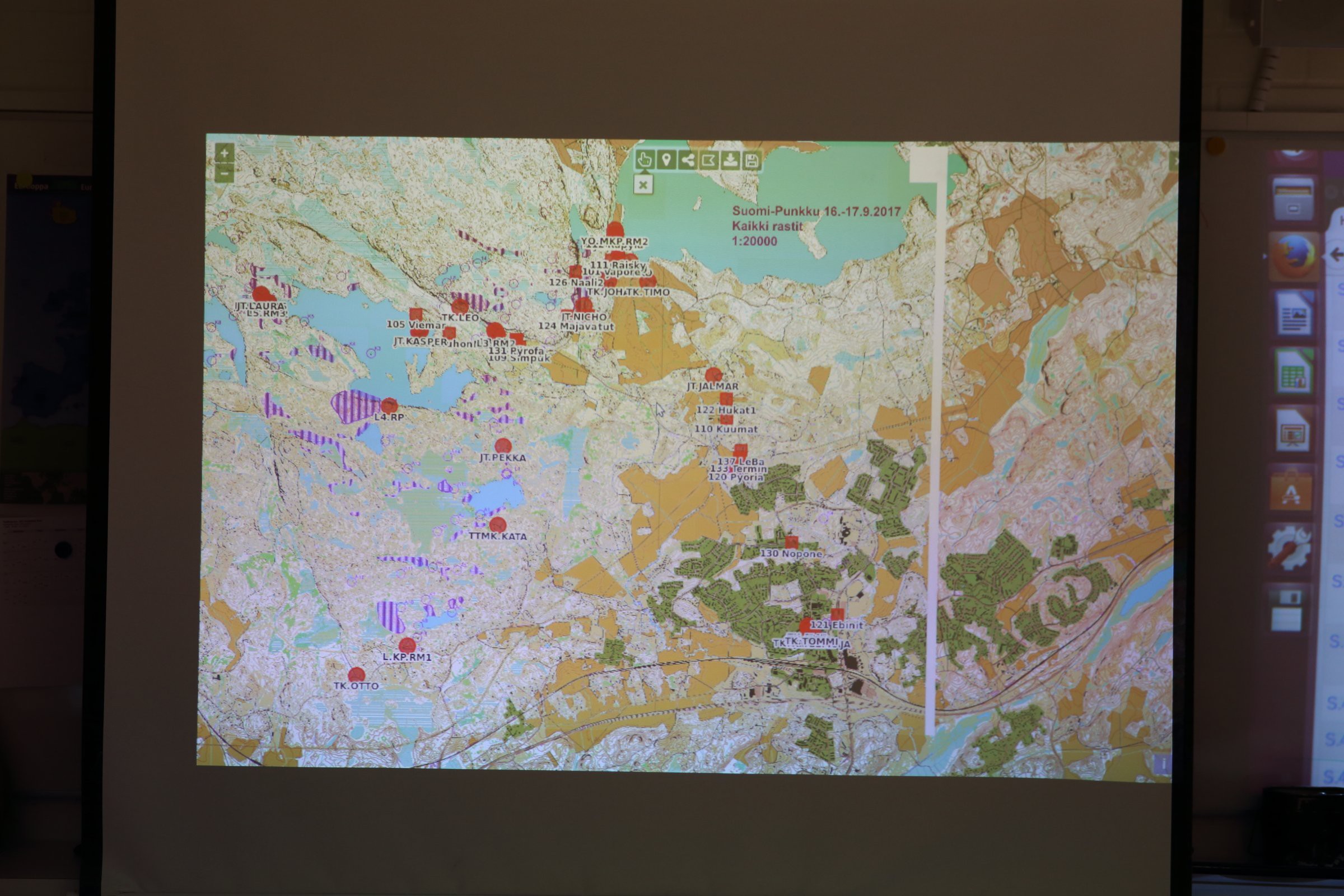
10/16/2017 at 19:23 • 0 commentsWe had data from the radio network, but the system to visualize the data was missing. One of our team members took an appointment and created one from scratch.
The online system consists of a PostGIS database to store the incoming packets and an Openlayers engine in the front to visualize all in the browser.
The project began in March 2017 and required numerous weekends of 100% programming with extraordinary attention to detail and the big picture in the same time.
The result was astonishing. The system received position reports as $POS messages (format created during the project), saved the data and updated it in real time on the map. The system was deemed stable enough to be ready for production.
![]()
-
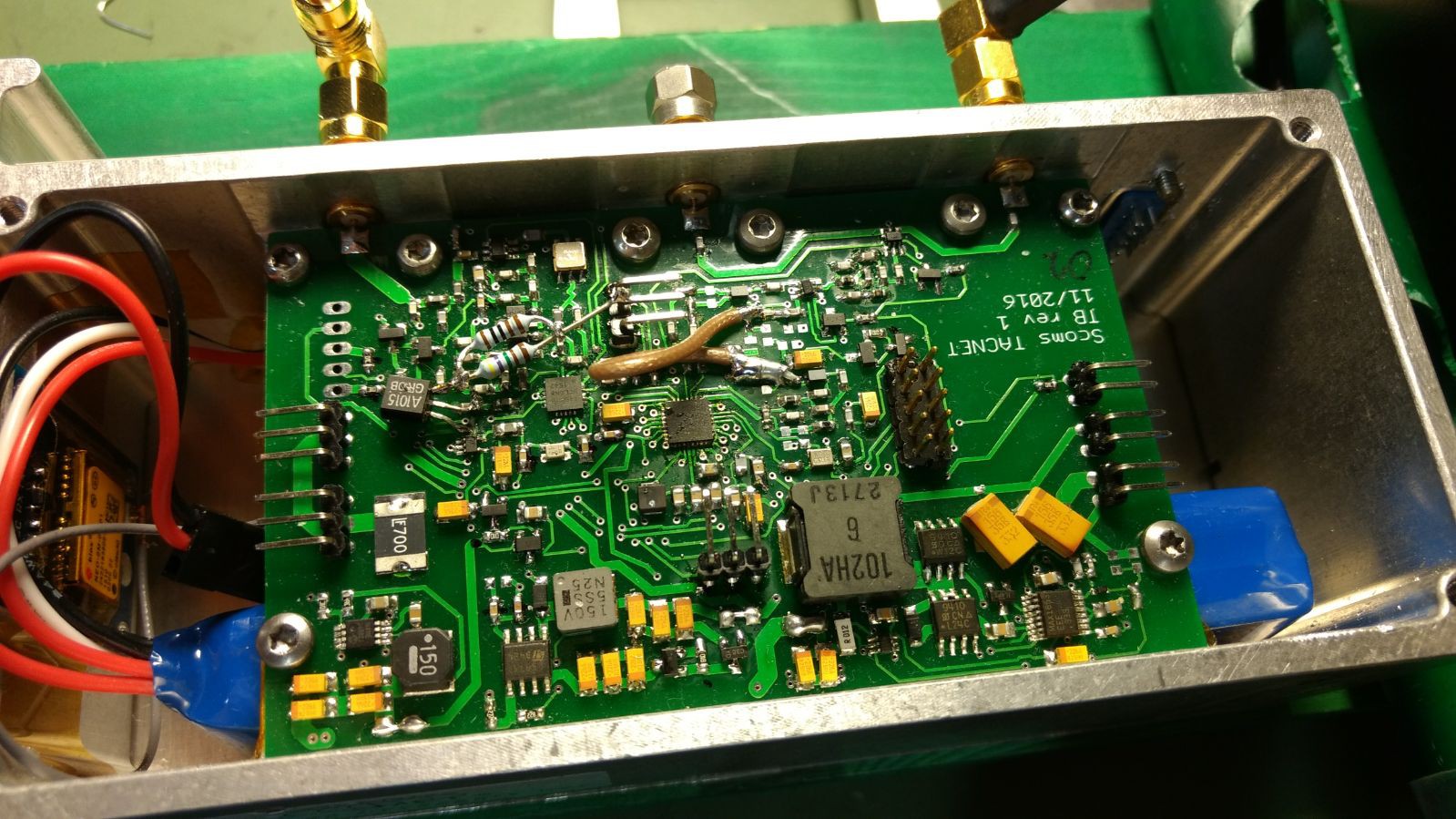
Base stations
10/16/2017 at 19:19 • 0 commentsThe network consists of multiple battery powered base stations and a single central controller that has an Internet connection. All of the base stations receive location data from trackers on VHF and have an UHF link radio for communication between base stations. The network is able to relay data from remote base stations through multiple hops so that all the location data is eventually received by the central node and sent to a web server.
Both the VHF and UHF parts use radio hardware and communication protocols specifically designed for needs of the system. New protocol designs are being planned to increase capacity to handle more trackers and to increase range of the radio links. Some parts of the current and future radio systems could possibly be used for other IoT, M2M and sensor network applications as well.
The schematics and board layouts have been attached to the project entry.
![]()
![]()
Scout monitoring system
Complete off-the-grid radio tracking network with online map service