0%
0%
Arduino Teletype
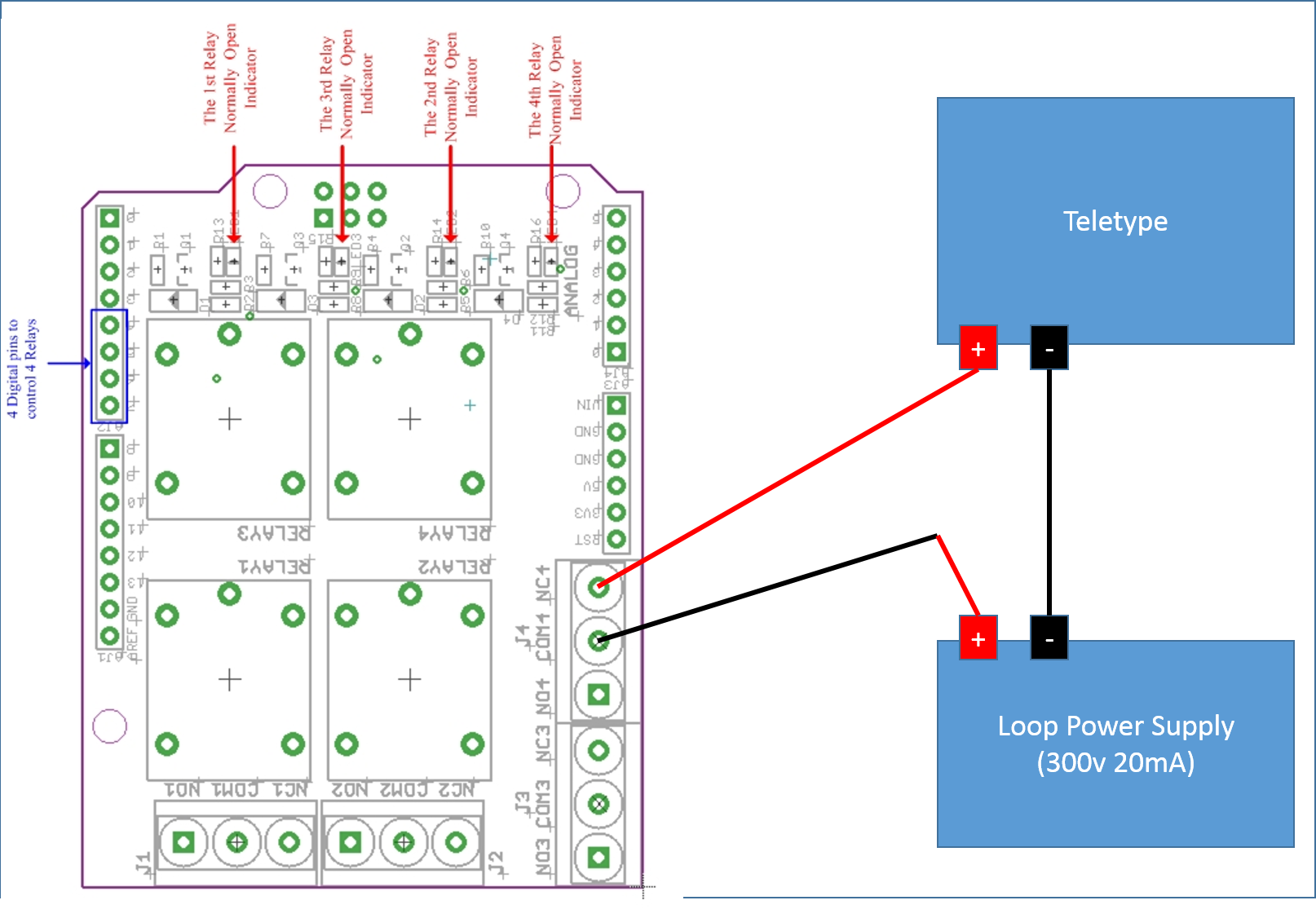
Building on my RPi Telegraph project, the Arduino Teletype translates characters to baudot code and drives a teletype.
 Ed Danis
Ed DanisBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Lubomir Jagos
Lubomir Jagos
 wille.io
wille.io
 Robin Reiter
Robin Reiter
 Edward Li
Edward Li
Hi, would love to try this project. But I wonder what kinda of current limeter PSU are you using?