 Dylan James Carr
Dylan James Carr
This system will be geared towards environmental analysis and cleanup. Oftentimes there are places humans cannot or should not reach in any efforts to clean up pollution. An autonomous force that can be remote controlled if necessary could prove quite useful in these cases.
Ultimately the project will have many types of smaller robots who will all have the same charging apparatus but will differ in their functions. Some will collect details about the environment, while others alter it; Removing plastic or other pollutants from water for instance. Different pollutants will require different approaches and the goal is to have an "ecosystem" which will support multiple varieties of bots designed by anyone who wants to design and build one.
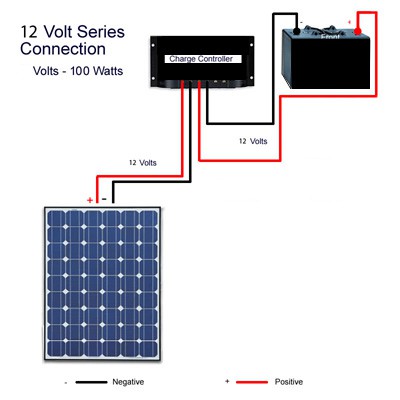
Initially the design will be comprised of two types of robots: A solar charging station and smaller scout robots. The scouts collect information about the surrounding environment and transmit it to a central database on the charging station which is then accessible to all the scout bots.


 Philip Ian Haasnoot
Philip Ian Haasnoot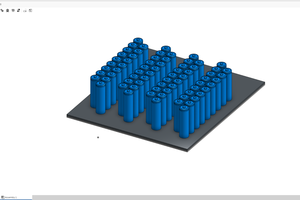
 AVR
AVR
 Bryan Williams
Bryan Williams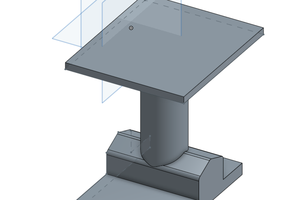
except restroom areas. Because water and stuff.