0%
0%
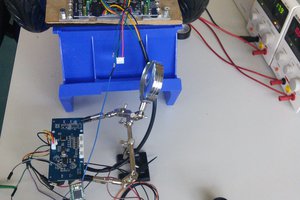
Hand wound inductors for a tiny robot.
My tiny motors has too low an inductance for the H-Bridge drive I was using, so I built some inductors to improve their performance.
 Alan Kilian
Alan KilianBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Lahorde
Lahorde

 Petar Crnjak
Petar Crnjak
!!! I wrote a long ramble on my thought process on a setup almost exactly like this just a few days ago... never thought to add an inductor in series, brilliant.