-
moving robot
04/30/2018 at 19:55 • 0 commentsWe finally got the robot to move. See the video here
Problems Solved
Teensy Bootloader > We could not get the pi to connect to the teensy. Discovered we had got the teensy and a nano mixed up at some point *face palm*, now works as expected
Power issue > The power unit was failing to charge, however after checking the powers supply plug we were using we discovered that it was outputting just under 5V volts instead of its rated 12V. Replaced power supply and now working fine.
Solid Core Motor wires > Kept breaking so changed to stranded.
A stable virtual box for the development computer > Bob has setup a stable Linux box with the ROS image for the development computer working on the virtual box.
Robot Pi > setup with all the packages installed.Next challenges
setup the Microsoft Kinect for the robots eyes > Matt ordered one from ebay so we can start implementing it. Will be interesting as the github guide does not cover its setup.
Static IP address for Wifi on Robot Pi >The current static IP address is only for the ethernet connection, need to get this changed so we don't have trailing wires.
Encoders > We now have two encoders but they don't fit the base mount so going to have to glue them on instead. Once in we can configure the Odometry settings.
Mounting & powering the Pi > The Pi need mounting on the robot and will need powering from the power unit >>> assuming the 5V stepdown already on the unit is for this?
Cleaning up the wiring > we need a breakout board to mount the teensy, IMU and the connecting wires to the power, drivers & encoders. Current setup is a bit of a nightmare
Motor delay when turning > there is currently a delay when sending the turn command to the robot, there is a short whine for about a second before the motor begins to turn. not sure if this is an issue with how we have the drivers wired up? -
Circuits and assembly
03/18/2018 at 20:21 • 0 commentsHit an issue with the "catkin_make" command on the Pi. From reading forum post, we need to enable swap file for this to complete. Ran the commands "sudo apt-get install dphys-swapfile
cd ~/linorobot_ws
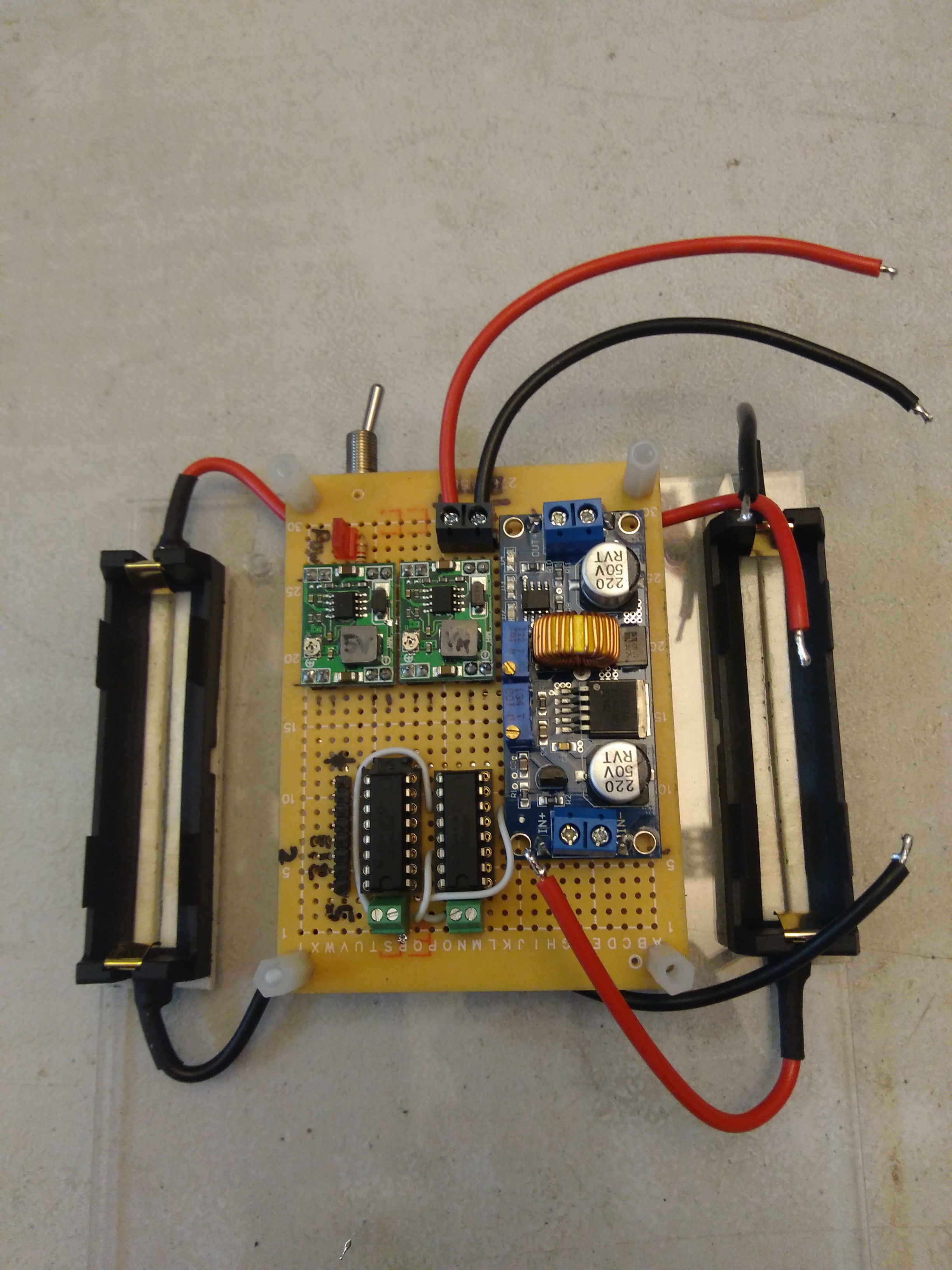
catkin_make"Catkin_make runs fine now. From the instuctions 1.4 we gave each the robot and the host development a static IP, that way every time we want to work on the robot we don't have to change the settings. We're using the kinect so we skipped section 1.5. We have wired up the section as can be seen the picture :
![]()
Our setup is 2 x 8650 batteries series This gives us ample of voltage for the robot. We use 2 buckles to reduce the power for the various components. The 2 chips in the center are the motor drivers and on the right hand side circuit is to charge the battery.
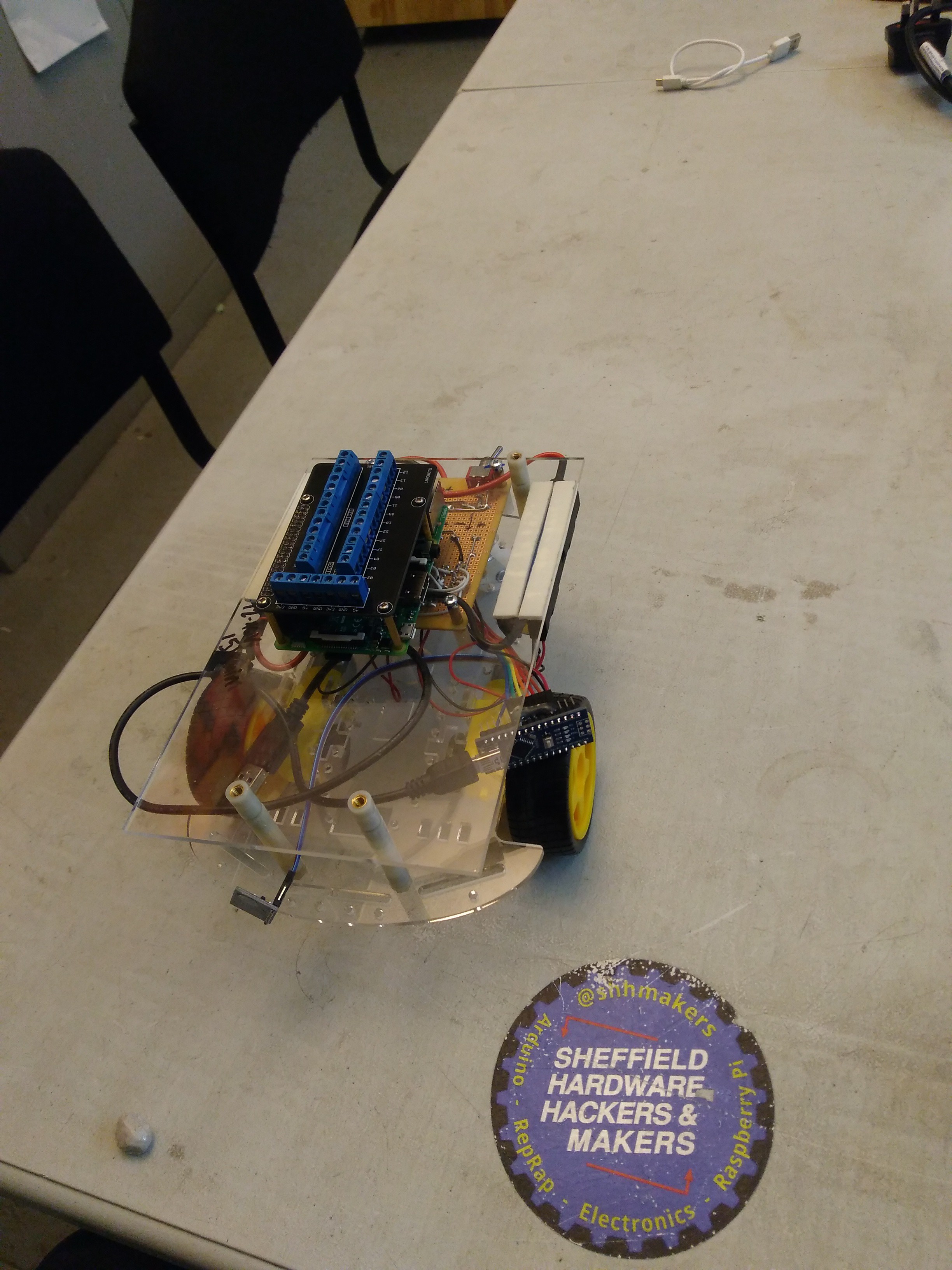
We've now attached the rest of the components: the raspberry pi (the robot computer), the Teensey.
![]()
LinoRobot : Robot Operating System
Linobot is an autonomous robot that moves around a floor space. Its build on top of the robot operating system.